

5630
.PDF1. Статика
Статика – раздел механики, в котором изучаются правила сложения сил и условия равновесия материальных тел. В статике рассматриваются абсолютно твѐрдые тела, являющиеся моделями материальных тел.
Материальное тело можно представить как систему, образованную непрерывной совокупностью материальных точек. Механизм, машина – это механические системы. А под материальной точкой понимается тело, размерами которого можно пренебречь. В абсолютно твѐрдых телах расстояние между отдельными точками остается неизменным. Такое тело не может ни деформироваться, ни изнашиваться. Мера механического взаимодействия материальных тел называется силой. Сила характеризуется численным значением (модулем), направлением и точкой приложения. Таким образом, сила является вектором. Прямая по которой направлен вектор, называется линией действия силы. Совокупность сил, действующих на данное тело, называется системой сил, а силы, входящие в состав данной системы, называются составляющими этой системы. Системы сил, оказывающие на твѐрдое тело одинаковые действия, называются эквивалентными. Если под действием системы свободное тело не меняет своего равномерного движения, то такая система называется уравновешенной. Сила, эквивалентная системе сил называется равнодействующей этой системы.
1.1.Аксиомы статики
Воснове статики лежат аксиомы – законы природы, принятые без
доказательства |
и |
установленные |
из |
опытов |
и |
наблюдений. |
Аксиома I. |
Две силы, приложенные к твѐрдому телу, |
уравновешиваются |
||||
тогда и только тогда, когда они равны по модулю и действуют по одной прямой в противоположных направлениях (см. рисунок 1(а, б)).
а) |
б) |
Рисунок 1 – Иллюстрация аксиомы I |
|
11

Аксиома II. Не нарушая состояние абсолютно твѐрдого тела, силы к нему можно прикладывать тогда и только тогда, когда они составляют уравновешенную систему.
Из этой аксиомы вытекает следствие: не нарушая состояния тела, точку приложения силы можно переносить вдоль линии еѐ действия (см. рисунок 2).
На рисунке 2 FA = FВ = F'В
Рисунок 2 – Иллюстрация следствия из аксиомы II
Другими словами, сила, приложенная к абсолютно твѐрдому телу, представляет собой скользящий вектор.
Аксиома III. Равнодействующая двух сил, приложенных к одной точке твѐрдого тела, приложена в этой же точке и изображается диагональю параллелограмма, построенного на векторах данных сил (см. рисунок 3).
Рисунок 3 – Иллюстрация аксиомы III
На основании данной аксиомы можно складывать силы и раскладывать их на составляющие.
12

Аксиома IV. Силы взаимодействия двух тел равны по модулю и направлены по одной прямой в противоположные стороны (3-й закон Ньютона), (см. рисунок 4).
Рисунок 4 – Иллюстрация аксиомы IV
Аксиома V. Если твѐрдое тело находится в равновесии, то это равновесие не нарушится, если тело станет абсолютно твѐрдым.
Данная аксиома (принцип отвердевания) используется в том случае, когда рассматривается равновесие тех тел, которые нельзя считать твѐрдыми.
1.2. Связи, реакции связей
Тело называется свободным, если оно может перемещаться в пространстве в любом направлении.
Тела, ограничивающие перемещение рассматриваемого тела, называется связями.
Тело, движение которого ограничено связями, называется несвободным. Силы, действующие на несвободное тело со стороны связей, называется реакциями связей. Значения сил реакций связи зависит от действия других, задаваемых сил, поэтому для еѐ определения надо решить соответствующую задачу механики. Направлена реакция связи в сторону, противоположную той, куда связь не даѐт перемещаться телу. Если связь может препятствовать перемещению тела по нескольким направлениям, то направление реакции такой связи наперѐд неизвестно и оно должно определятся в результате решения рассматриваемой задачи.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно считать свободным, если к действию задаваемых сил добавить действие сил реакций связей.
Основные типы связей
1. Гладкая плоскость (поверхность), или опора. Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближение пренебречь. Такая поверхность не даѐт телу перемещаться только по
13

направлению общего перпендикуляра (нормали) к поверхности соприкасающихся тел в точке их касания (рисунок 5, а).
Рисунок 5 – Направление реакции N при касании гладкой поверхности (а), одной точки поверхности (б)
Поэтому реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой (рисунок 5,б), то реакция направлена по нормали к другой поверхности.
2. Нить. Связь, осуществленная в виде гибкой нерастяжимой нити (рисунок 6), не даѐт телу М удаляться от точки подвеса нити по направлению АМ.
Рисунок 6 – Направление реакции Т натянутой нити Поэтому реакция Т натянутой нити направлена вдоль нити к точке еѐ
подвеса.
3. Цилиндрический шарнир (подшипник). Цилиндрический шарнир (или просто шарнир) осуществляет такое соединение двух тел, при котором одно тело может вращаться по отношению к другому вокруг общей оси, называемой осью шарнира (например, как две полвины ножниц). Если тело АВ прикреплено с помощью такого шарнира к неподвижной опоре D (рисунок 7), то точка А не может при этом переместится ни по какому направлению, перпендикулярному оси шарнира.
Следовательно, реакция R цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси шарнира, т.е. в плоскости Аху. Для силы R в этом случае наперѐд неизвестны ни еѐ модуль R, ни направление
(угол α).
14

Рисунок 7 – Направление реакции R цилиндрического шарнира
4. Сферический шарнир и подпятник. Тела, соединѐнные сферическим шарниром, могут как угодно поворачиваться одно относительно другого вокруг центра шарнира. Примером служит прикрепление фотоаппарата к штативу с помощью шаровой пяты к неподвижной опоре (рисунок 8, а), то точка А тела, совпадающая с центром шарнира, не может при этом совершить никакого перемещения в пространстве. Следовательно, реакция R сферического шарнира может иметь любое направление в пространстве. Для неѐ наперѐд неизвестны ни еѐ модуль R, ни углы с осями Ахуz.
Рисунок 8 – Направление реакции R сферического шарнира (а), подпятника (б)
Произвольное направление в пространстве может иметь и реакция R подпятника (подшипника с упором), изображѐнного на рисунке 8, б.
5. Невесомый стержень. Невесомым называют стержень, весом которого по сравнению с воспринимаемой им нагрузкой можно пренебречь. Пусть для какого-нибудь находящегося в равновесие тела (конструкции) такой стержень, прикреплѐнный в точках А и В шарнирами, является связью (рисунок 9, а). Тогда на стержень будут действовать только две силы, приложенные в точках А и В; при равновесие эти силы должны быть направлены вдоль одной прямой, т.е. вдоль АВ. Но тогда, согласно закону о действии и противодействии, стержень будет действовать на тело с силой, тоже направленной вдоль АВ.
Следовательно, реакция N невесомого шарнирно прикреплѐнного прямолинейного стержня направлена вдоль оси стержня.
15

Если связью является криволинейный невесомый стержень (рисунок 9, б), то аналогичные рассуждения приведут к выводу, что его реакция тоже направлена вдоль прямой АВ, соединяющей шарниры А и В (на рисунок 9, а направление реакции соответствует случаю, когда стержень сжат, а на рисунке 9, б – когда растянут).
Рисунок 9 – Направление реакции N невесомого прямолинейного (а), криволинейного (б) стержня
При решении задач реакции связей обычно являются неизвестными, подлежащими определению. Нахождение реакции имеет то практическое значение, что, определив их, а тем самым определив по закону о действие и противодействие и силы давления на связи, получают исходные данные, необходимые для расчѐта прочности соответствующих частей конструкции.
1.3. Система сходящихся сил
Сходящейся называется система сил линии действия, которых пересекаются в одной точке. Исходя из основных задач статики необходимо:
1 – упростить такую систему сил; 2 – определить условия равновесия данной системы сил.
Сложение сил. Равнодействующая сила
Система сил, линии, действия которых пересекаются в одной точке, называется системой сходящихся сил. Поскольку силы являются скользящими векторами, их можно перенести в одну точку – точку схода.
Если на твѐрдое тело действует система сил, линии действия которых пересекаются в одной точке, то равнодействующую этих сил можно найти двумя способами – геометрическим и аналитическим.
Рассмотрим геометрический способ сложения сил. Равнодействующая 2 сил находится, согласно аксиоме параллелограмма сил, диагональю параллелограмма, построенного на этих силах (рисунок 10, а) или как замыкающая сторона треугольника, построенного на этих силах (рисунок 10, б).
16

а) 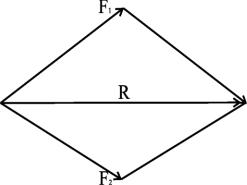 , б
, б Рисунок 10 – Равнодействующая R 2 сил
Рисунок 10 – Равнодействующая R 2 сил
В случаях, когда сил 3 и более, результирующая находится как замыкающая сторона многоугольника сил (рисунок 11). Следует заметить, что многоугольник будет плоский, если все силы лежат в одной плоскости, и пространственный, если силы лежат в различных плоскостях.
Рисунок 11 – Равнодействующая R 3 и более сил
Результирующая сила, называется главным вектором. В случае сходящейся системы сил главный вектор является равнодействующей силой. Практически результирующая сила определяется аналитически, через проекции на оси координат (рисунок 12).
Рисунок 12 – Проекции результирующей силы R на оси координат
17

|
|
|
|
|
|
|
|
|
|
|
R |
= R2 x R2 у R2 z |
, где R , |
R , |
R |
z |
равны сумме проекций сил, |
||||
|
|
|
|
x |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
n |
действующих на тело на |
соответствующие |
оси |
Rx Fix ; |
Ry Fiy ; |
||||||
|
|
|
|
|
|
|
|
|
i 1 |
i 1 |
Rz |
n |
|
|
|
|
|
|
|
||
Fiz . |
|
|
|
|
|
|
|
|||
i 1 |
|
|
|
|
|
|
|
|||
Проекция любого вектора, в том числе и силы, определяется как произведение модуля (величины) вектора на косинус угла между векторами и направлением данной оси, например (рисунок 13 (а, б)).
а) 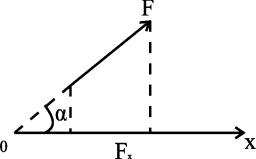 , б)
, б)
Рисунок 13 – Определение проекции Fх вектора F на ось, если угол между вектором и осью α < 90° (а), α > 90° (б)
|
|
|
|
|
|
|
|
|
|
|||
F |
|
|
F , OX , знак проекции определится |
углом |
α, между |
вектором |
||||||
x |
Fсos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
силы и |
положительным направлением |
оси |
ОХ; |
0 α |
Π |
|
проекция |
|||||
|
||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
положительна; |
|
Π |
α Π – отрицательна. |
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
Силу можно разложить на составляющие по любым направлениям, |
так на |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
рисунке 14 показаны направления 1 и 2 и сила F |
, еѐ составляющие будут F1 |
и F2 . |
||||||||||
Рисунок 14 – Разложение силы на составляющие Величины, составляющих сил определяются как длины отрезков по
соответствующим направлениям 1 и 2. Пунктирные линии на рисунке 14
18
параллельны направлениям 1 и 2, а точки их пересечения с заданными
направлениями соответствуют концам векторов сил F1 и F2 .
1.4. Теория моментов
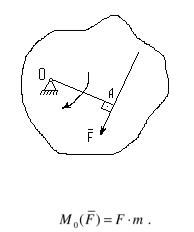
Если линии действия сил лежат в одной плоскости, то такая система сил называется плоской. При изучении плоской системы сил мы сталкиваемся с понятием момента сил относительно точки и парой сил. Моментом силы относительно точки называется произведение величины (модуля) силы на длину перпендикуляра, опущенного из точки на линию действия силы. Длина опущенного перпендикуляра называется плечом силы. Если бы тело было закреплено (рисунок 15) в точке О, то сила  стремилась бы вращать тело относительно этой точки. На рисунке отрезок ОА – плечо силы
стремилась бы вращать тело относительно этой точки. На рисунке отрезок ОА – плечо силы  относительно точки О.
относительно точки О.
Рисунок 15 – Плечо силы 
Момент силы измеряется в ньютонометрах (Н∙м).
Принято считать момент положительным, если сила стремится вращать тело против часовой стрелки. Из определения величины момента следует, что момент силы относительно данной точки не изменится при переносе силы вдоль линии еѐ действия, а если линия действия силы проходит через точку, момент равен нулю.
Парой сил или просто парой называется система двух равных по модулю и противоположных по направлению параллельных сил. Кратчайшее расстояние между линиями действия сил пары называется плечом. Момент пары сил по абсолютной величине равен произведению одной из сил пары на плечо. Всякую пару, не изменяя еѐ действие на абсолютно твѐрдое тело, можно заменить другой парой, расположенной как угодно в той же плоскости и имеющей то же направление вращения, при этом можно изменить как плечо пары, так и соответственно модуль еѐ сил. Таким образом, всякую силу можно
19

переносить параллельно самой себе в любую точку тела, присоединяя при этом пару, момент которой равен моменту переносимой силы относительно той точки, в которую переносится сила. А алгебраическая сумма моментов всех данных сил, расположенных произвольно на плоскости относительно произвольной точки О, называется главным моментом М0 данной плоской системы сил относительно этой точки и
Вектор  , равный геометрической сумме всех сил данной системы, называется главным вектором этой системы.
, равный геометрической сумме всех сил данной системы, называется главным вектором этой системы.
Любую плоскую систему сил всегда можно заменить одной силой, равной главному вектору системы и приложенной в произвольной точке О и парой, момент которой равен главному моменту данной системы сил относительно этой точки О. Момент равнодействующей плоской системы сил относительно любой точки, лежащей в плоскости действия этих сил, равен алгебраической сумме моментов составляющих сил относительно той же точки.
На основании вышеизложенного можно сформулировать условие равновесия рычага. Рычагом называется твѐрдое тело, вращающееся около неподвижной оси и находящееся под действием сил, лежащих в плоскости, перпендикулярной и этой оси. Точка пересечения оси рычага с плоскостью действия сил называется точкой опоры (рисунок 16).
Рисунок 16 – Точка опоры рычага Для равновесия рычага необходимо и достаточно, чтобы равнялась нулю
алгебраическая сумма моментов всех сил, приложенных к рычагу, относительно точки его опоры.
1.5. Равновесие системы сходящихся сил
Равновесие системы сходящихся сил, приложенных к твѐрдому телу, будет в том случае, если главный вектор (равнодействующая) этих сил будет равен нулю.
20