

409_Arhipov_Chuhrov-diskr_soobsch_Monografiya
.pdfтирующего шума и снижению помехоустойчивости.
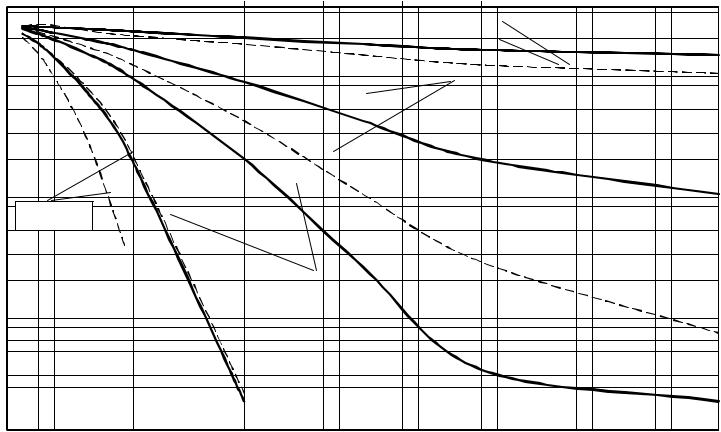
3. При углах прихода помехи П > 50 в основной канал вносятся сравнительно небольшой уровень шума и помехоустойчивость при дальнейшем увеличении П улучшается незначительно. Так, для h2=30 при изменении П от 45 до 60 вероятность ошибки уменьшается в 50 раз по сравнению с углами прихода помехи, близкими к направлению прихода сигнала, а при дальнейшем изменении П от 60 до 90 – всего в 3 раза.
4. Применение противоположных сигналов (показано пунктиром на рисунках 2.12 и 2.13) позволяет значительно уменьшить вероятность ошибки. Так, при h2=30 и П = 20 вероятность ошибки уменьшается в 100 раз.
5. Проведенные расчеты показывают, что применения рамочных антенн эффективно, если угол прихода помехи отличается от направления на источник полезного сигнала не менее чем на 10 – 20 градусов. В противном случае для подавления помехи необходимо обеспечить большой коэффициент передачи в дополнительном канале, что, даже при полной компенсации помехи, приведет к внесению в основной канал большого флуктуационного шума. Это, в свою очередь, значительно ухудшит помехоустойчивость приема.
Как отмечалось выше, при адаптивном подавлении помехи с применением дополнительного канала приема в основной канал будут вноситься шумы, уровень которых зависит от коэффициента передачи, формируемого в опорном канале (от угла прихода помехи), что приводит к увеличению вероятности ошибочного приема сигналов.
Из (2.35) следует, что даже при полном подавлении УП эквивалентное отношение энергии сигнала к спектральной плотности шума на выходе адаптивного подавителя будет уменьшаться (в зависимости от угла прихода по-
мехи): h |
|
|
h |
|
, что приведет к снижению помехоустойчивость приема. |
|
|
|
|||
э1,2 |
1 K2ˆ |
|
|
||
|
|
|
|||
|
|
|
|
|
|
|
|
|
П |
|
|
Так, при угле прихода УП = 40 энергетический проигрыш (Э) составляет 4 дБ, при < 20 энергетический проигрыш превышает 10 дБ.
При больших коэффициентах передачи в опорном канале (при углах прихода помехи, близких к направлению прихода полезного сигнала и использовании ортогональных рамочных антенн) увеличение вероятности ошибки может превысить величину, рассчитанную для варианта приема сигнала в системе без компенсации УП.
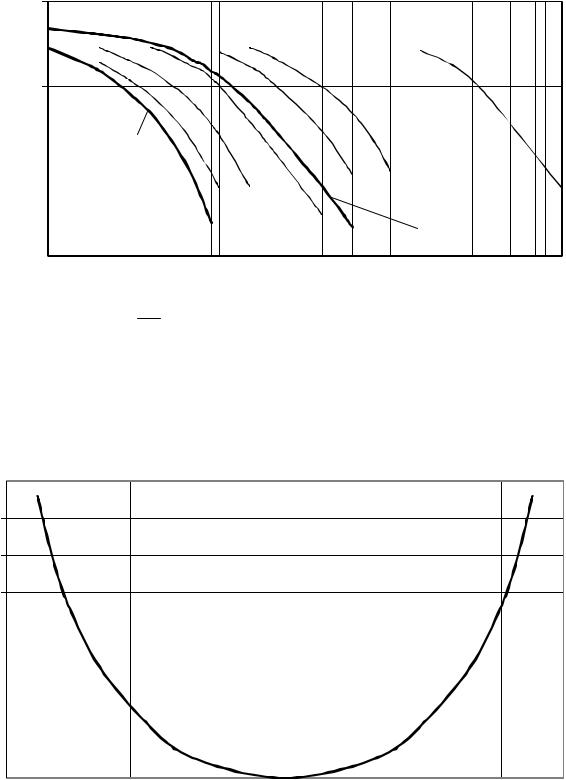
На рисунке 2.14 приведены сравнительные характеристики помехоустойчивости без применения компенсатора (без помехи и в присутствии УП) и с применением процедуры компенсации при различных углах прихода помехи.
На рисунке жирными линиями показаны графики без УП ( hп2 0) и в присут-
FcT
ствии мощной УП ( hп2 10) без применения компенсатора. Из приведенных
FcT
51
зависимостей видно, что применение адаптивного фильтра будет эффективно при углах прихода помехи 15 – 20 , либо при приеме более мощной УП.
52
53
|
(град) |
|
|
|
|
|
|
|
|
|
|
рош |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
|
1,00E+00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,00E-01 |
|
|
|
|
|
|
h2=10 |
|
|
|
|
|
|
|
|
|
|
h2=1 |
|
|
|||
|
|
|
|
|
|
|
h2=10 |
|
|
||
1,00E-02 |
|
|
|
|
|
|
h2=1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
1,00E-03
h2=50
1,00E-04 h2=50
1,00E-05 |
h2=30 |
h2=30 |
|
1,00E-06 |
|
1,00E-07
Рисунок 2.12 – Зависимость вероятности ошибки от направления прихода помехи при различных отношениях мощности сигнала к спектральной плотности шума (сплошной линией – для ортогональных сигналов, пунктиром – для противоположных сигналов)
54
рош |
1 |
10 |
h2 |
|
100 |
1,00E+00 
 п =
п =
1,00E-01
 п =
п =
1,00E-02
1,00E-03
п =
1,00E-04
1,00E-05
1,00E-06
1,00E-07
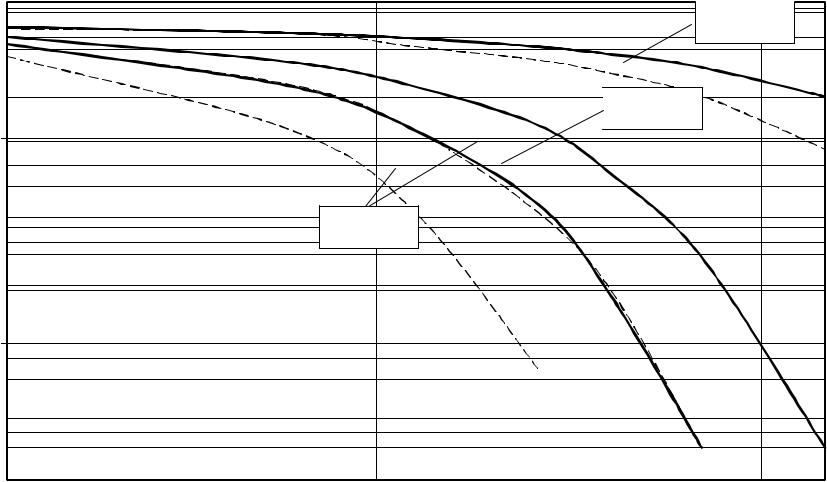
Рисунок 2.13 – Зависимость вероятности ошибки от отношения мощности сигнала к спектральной плотности шума при различных углах прихода помехи (сплошной линией – для ортогональных сигналов,
пунктиром – для противоположных сигналов)
Рош |
1 |
|
|
|
|
10 |
100 |
|
|
|
1000 |
1,0E+00 |
|
|
|
|
|
|
|
|
|
|
h2 |
1,0E-01 |
|
|
|
|
|
|
|
|
|
|
|
1,0E-02 |
|
|
|
|
|
|
=5 |
||||
|
|
|
|
|
|
|
|||||
1,0E-03 |
|
|
|
2 |
|
|
10 |
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|||||||
1,0E-04 |
|
hп |
0 |
45 |
|
|
|
|
|
||
|
FcT |
15 |
|
||||||||
|
|
|
|
||||||||
|
|
|
|
|
|
60 |
|
|
|
2 |
|
|
|
|
|
|
|
h |
|
||||
1,0E-05 |
|
|
|
|
|
30 |
|
|
п |
10 |
|
|
|
|
|
|
|
FcT |
|||||
1,0E-06 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.14 – Сравнительный анализ помехоустойчивости:  – без применения компенсатора; – с применением процедуры компенсации
– без применения компенсатора; – с применением процедуры компенсации
при различных углах прихода помехи
Зависимость энергетического проигрыша адаптивного фильтра по сравнению с оптимальным приемником в белом шуме от угла прихода помехи приведена на рисунке 2.15.
16 Э, дБ
14
12
10
8
6
4
2
, град
0 
0 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
Рисунок 2.15 – Энергетический проигрыш адаптивного фильтра по сравнению с оптимальным приемником в белом шуме от угла прихода помехи
При углах прихода помехи, близких к углу прихода полезного сигнала, как
55
отмечалось выше, могут быть применены, например, комбинированные методы с использованием перестраиваемых режекторных фильтров.
Приведенные выше результаты были использованы в опытноконструкторской работе [93] на кафедре радиоприемных устройств НЭИС при непосредственном участии авторов. Целью данной работы являлось разработка стенда контрольно-измерительного возимого (СКИВ), предназначенного для повышения эффективности работы наземного и бортового оборудования системы дальней навигации «Лоран-С». Одним из назначений стенда, в соответствии с техническим заданием, являлось разработка анализатора помеховой обстановки и исследование устройств защиты от узкополосных помех. В частности были применены предложенные авторами методы адаптивной компенсации УП на основе алгоритмов спектрального анализа и оценки направления прихода помехи.
Стенд содержит следующие основные узлы:
1.Анализатор помеховой обстановки, позволяющий производить измерения энергетического спектра радиообстановки в диапазоне частот 80 – 120 кГц, а также выполняющий функции обнаружения УП, измерения их параметров, классификации помех по мощности и управления блоком защиты от помех.
2.Блок защиты от УП, выполняющий параллельно процедуры формирования компенсирующего напряжения и собственно компенсацию помех, а также вырезания участков спектра, пораженного узкополосной помехой, с помощью перестраиваемых режекторных фильтров.
3.Оборудование отображения и документирования информации.
4.Антенная система и источники питания.
5.Оконечное оборудование радионавигационной системы «Лоран-С». Все оборудование размещено на базе автомобиля, что позволяет работать в реальных условиях автономно, независимо от места расположения СКИВ и погодных условий. Стенд прошел полевые испытания. Результаты испытаний показали, что при использовании ортогональных рамочных антенн и оценки направления прихода помехи, УП может быть подавлена на 35 – 40 дБ.
2.3 Анализ адаптивного подавителя УП с применением замкнутого алгоритма адаптации
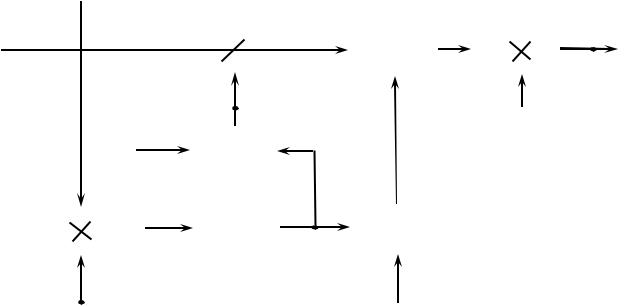
Известна схема адаптивного подавления (фильтрации) помех, показанная на рисунке 2.16 [102, 103]. По основному каналу на вход приемного устройства подается смесь полезного сигнала Sr(t), не коррелированной с ним помехи SП(t) и флуктуационного шума 1(t). Другое приемное устройство принимает помеху SП(t), не коррелированную с сигналом, но неизвестным образом коррелированную с помехой SП(t) и флуктуационный шум 2(t), не зависимый от 1(t).
X1(t) = Sr(t) + SП(t) + 1(t); |
(2.36) |
X2(t) = SП(t) + 2(t). |
(2.37) |
56

|
|
|
|
|
Uˆc(t) |
X1(t) |
|
Основной канал |
|
|
|
|
— |
||||
|
|
|
|
||
|
|
|
|||
|
|
|
|
|
|
UˆП (t)
X2(t)
Дополнительный канал
Рисунок 2.16 – Структурная схема устройства компенсации помехи с применением дополнительного канала приема
Реализация X2(t), поступающая по дополнительному (опорному) входу, предназначена для формирования оценки помехи SˆП t . В процессе адаптации эта оценка SˆП t вычитается из входной реализации X1(t) для того, чтобы сформировать выходной сигнал системы в соответствие с алгоритмом
Y(t) Sˆr (t) X1(t) Sˆп(t) X1(t) X2 |
(T)w(t) |
|
(2.38) |
Sr (t) SП (t) 1(t) w(t)[SП (t) 2(t)], |
|
где w(t) – весовой коэффициент, получаемый на выходе интегратора |
|
T |
|
w(t) 2 Y(t)X2(t)dt, |
(2.39) |
0 |
|
– коэффициент, определяющий скорость и устойчивость процесса адаптации, который определяется постоянной времени интегратора ( = 1/ ).
Выходной сигнал фильтра Y(t) является наилучшим в среднеквадратическом смысле приближением сигнала Sˆr (t).
Перемножитель и интегратор вычисляют функцию корреляции между выходным сигналом (сигналом ошибки) Y(t) и опорным сигналом X2(t).
Таким образом, пока на выходе устройства есть неподавленный остаток помехи, коррелированный с помехой в дополнительном канале, на выходе перемножителя будет выделяться постоянная составляющая, что приведет к увеличению выходного напряжения интегратора и, следовательно, к увеличению коэффициента усиления регулируемого усилителя (РегУс) и возрастанию уровня помехи на втором входе вычитателя. Процедура настройки будет продолжаться до тех пор, пока не будет обеспечен минимум мощности выходного сигнала. В отсутствие корреляции между полезным сигналом и помехой, а также при условии исключения попадания полезного сигнала в дополнительный
57
канал, это означает полное подавление (компенсацию) помехи в основном канале. Это устройство так же, как и рассмотренное выше, относится к классу пространственных компенсаторов (или пространственной фильтрации) помех.
В [1,106] показано, что замкнутая система является устойчивой, то есть среднее значение весового коэффициента сходится, если
0 |
1 |
, |
(2.40) |
|
2PП
где РП – мощность помехи.
При увеличении скорость сходимости повышается, но при этом возрастает неравномерность w(t) при быстрых изменениях сигналов и шумов, что приводит к увеличению среднеквадратического отклонения (СКО) ошибки фильтрации.
При уменьшении функция w(t) становится более монотонной (значение СКО уменьшается), но при этом время адаптации значительно возрастает.
Скорость сходимости зависит от мощности помехи и постоянной времени ( ) интегратора. При увеличении мощности помехи или уменьшении скорость сходимости увеличивается.
Регулируемый усилитель может быть построен различным образом: либо в виде перемножителя, либо в виде усилителя с цепью управления коэффициентом передачи.
В некоторых случаях, при практической реализации схемы, могут возникнуть проблемы, связанные с формированием оценки помехи. Так, если помеха в опорном канале значительно меньше, чем в основном, то в дополнительном канале необходимо увеличивать коэффициент усиления, что в ряде случаев невозможно из-за ограниченного динамического диапазона цепи настройки (в частности, РегУс). Кроме этого, при больших уровнях помехи в основном и дополнительном каналах невозможно обеспечить компенсирующий сигнал необходимого уровня из-за нелинейности передаточной характеристики РегУс.
Для повышения эффективности адаптивного фильтра предложена схема, приведенная на рисунке 2.17. Данное техническое решение позволяет при том же значении значительно уменьшить время адаптации (либо при том же времени адаптации уменьшить остаточную ошибку фильтрации) и одновременно расширить динамический диапазон канала настройки путем введения дополнительного весового коэффициента в основной канал приема.
58
X1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
Y (t) |
|
|
|
|
|
||
Основной |
|
|
|
|
|
|
X 1(t) |
— |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Y(t) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
канал |
1 |
+ w (t) |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
U=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
+ |
|
|
|
|
Sˆп(t) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
w (t) |
РегУс |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
X2(t) |
Дополнительный канал |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.17 – Модифицированная схема адаптивного фильтра
Схема работает следующим образом. При наличии помехи на входе основного и дополнительного каналов возрастает весовой коэффициент w (t) на выходе коррелятора, увеличивая коэффициент передачи РегУс и, следовательно, долю помехи на втором входе вычитателя. Одновременно с этим снижается уровень сигнала X1(t) в основном канале (на первом входе вычитателя). Это производится с помощью делителя, на втором входе которого формируется весовой коэффициент (1 + w(t)). Таким образом, настройка ведется одновременно по основному и дополнительному каналу, ускоряя процесс адаптации. Тем самым уменьшается время сходимости без изменения постоянной времени интегратора. Для восстановления уровня сигнала основного канала до исходной величины на выходе вычитателя может быть применен дополнительный перемножитель. Для схемы (рисунок 2.17) выходной сигнал адаптивного фильтра
Y t |
|
X1 t |
X |
|
|
|
|
t X |
|
|
(2.41) |
||
|
|
|
|
|
|
||||||||
|
|
|
t w t 1 w t X |
t w t 1 w t |
|||||||||
|
|
2 |
|
|
|
1 |
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 w t |
|
|
|
|
|
|
|
|
||||
Весовой коэффициент w (t) для модифицированного алгоритма (в отсутствии полезного сигнала) определяется из следующих соображений.
Пусть на вход основного канала (в отсутствии полезного сигнала) поступает смесь помеховой составляющей aSП(t) (где а – определяет уровень помехи на входе основного приемника) и флуктуационного шума 1(t)
X1(t) = aSП(t) + 1(t). |
(2.42) |
На вход дополнительного канала подается помеха, коррелированная с помехой на основном входе, но отличающаяся по уровню (b), и флуктуационный шум 2(t)
X2(t) = bSП(t) + 2(t). |
(2.43) |
59
Шумы в каналах считаем независимыми (некоррелированными) с нулевым средним.
|
|
|
X1(t) |
X |
|
(2.44) |
|
|
|||||||
Y (t) X |
(t) X |
2(t)w (t) |
2(t)w (t), |
||||
|
|
|
1 w (t) |
|
|
|
|
Y(t) X1(t) X |
|
|
|
|
(2.45) |
||
2(t)w (t)[1 w (t)]. |
|
|
|||||
Подставляя (2.45) в (2.39), запишем выражение для весового коэффициента в виде
|
2T |
2T |
|
|
|
||
|
X2(t)Y(t)dt |
|
X |
2(t){X1(t) X |
|||
w (t) |
|
|
2 (t)w |
(t)[1 w (t)]}dt |
|||
|
0 |
0 |
|
|
(2.46) |
||
|
|
|
|
|
|
|
|
2T [bSП (t) 2 (t)]{aSП (t) 1(t) [bSП (t)][w (t) w 2(t)]}dt
0
При отсутствии корреляции шумов парциальных каналов, а также шумов и помехи, весовой коэффициент будет определяться выражением
|
2T |
2 |
|
|
|
|
2 |
2 |
2 |
2 |
2 |
|
2 |
|
2 |
2 |
|
||||||
|
[abSП |
|
|
|
|
SП |
(t)b |
|
|
|
|
(t) 2 (t)]dt |
(2.47) |
||||||||||
w(t) |
|
(t) w(t)b |
(t) w |
|
|
SП(t) w(t) |
2 (t) w |
||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Группируя члены и продифференцировав обе части уравнения, получим |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
2 |
2 |
2 |
|
2 |
2 |
2 |
|
||
|
|
|
dw(t) 2 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
abSП (t) w(t)[b |
|
SП (t) 2 |
(t)] w |
|
(t)[b |
|
SП |
(t) 2 (t)] . |
(2.48) |
|||||
|
|
|
|
dt |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В установившемся режиме (после окончания переходного процесса при t ) производная весового коэффициента будет стремиться к нулю
(dw(t) 0). Тогда, решая (2.48) относительно w (t) и ограничиваясь положи- dt
тельным значением корня, получим
w (t) |
1 |
|
|
4abS П2 (t) |
|
|
|
|
|
|
1 |
|
|
|
1 . |
(2.49) |
|
|
b2S 2 |
(t) 2 |
(t) |
|||||
|
2 |
|
|
|
||||
|
|
|
|
П |
2 |
|
|
|
Из (2.49), в частности, следует, что в отсутствии флуктуационных шумов в дополнительном канале (при 2(t) = 0) весовой коэффициент зависит только от отношения уровней помех в каналах приема
|
1 |
|
4a |
|
|
||||
|
|
1 |
|
|
1 . |
(2.50) |
|||
w (t) |
|
||||||||
|
|
2 |
|
b |
|
|
|||
Аналогично для схемы (рисунок 1.5) значение весового коэффициента |
|||||||||
w(t) |
|
|
|
abSП2 (t) |
|
. |
(2.51) |
||
b2SП2 (t) 22(t) |
|||||||||
60