

18.4. Parallel qo‘zg‘atishli motor aylanish tezligini boshqarish
Motorlarning aylanish tezligini boshqarish usullar baholanganda quyidagi ko‘rsatkichlar taqqoslanadi:
- boshqarishning ravonligi;
- boshqarish diapazoni, eng katta aylanish tezligining eng eichik tezlikka nisbati;
- boshqarishning samaraliligi, boshqarish apparatlarining narxi va ulardagi elektr energiya isroflari.
Ifoda (18.5) dan shuni bilish mumkinki, parallel qo‘zg‘atishli motorning yakori aylanishi tezligini boshqarishga yakor zanjiridagi qarshilikni o‘zgartirib, asosiy magnit oqimni o‘zgartirib va yakor zanjiri kuchlanishini o‘zgartirib erishish mumkin ekan.
Yakor zanjiriga qo‘shimcha qarshilik kiritish. Qo‘shimcha qarshilik (rqo‘sh reostat) yakor zanjiriga ishga tushirish reostati (ITR) kabi ulanadi. Bunda faqat shu farq bo‘ladiki, reostat o‘zidan uzoq muddat tok oqishiga hisoblangan bo‘lishi zarur.
Yakor zanjiriga reostat rqo‘sh ulanganda (18.5) ifoda quyidagicha o‘zgaradi
![]() ,
(18.12)
,
(18.12)
bunda
![]() - yu.i. rejimidagi aylanish tezligi;
- yu.i. rejimidagi aylanish tezligi;
![]() -yakor zanjiridagi kuchlanishlar pasayuvi natijasida aylanish tezligi
o‘zgarishi.
-yakor zanjiridagi kuchlanishlar pasayuvi natijasida aylanish tezligi
o‘zgarishi.
Qo‘shimcha
qarshilik rqo‘sh
ortishi bilan
ortadi va aylanish tezligini kamaytiradi. Bog‘lanish
![]() parallel qo‘zg‘atishli motor mexanik tavsifini ham tasvirlaydi
(18.4,a-rasm):
yakor zanjiridagi qarshilik rqo‘sh
ortishi
bilan mexanik tavsifning nishabligi ortadi, aylanish tezligi esa,
valdagi berilgan (o‘zgarmas) yuklanishda (M=MNOM),
kamayadi. Ushbu boshqarish usuli aylanish tezligini katta diapazonda
ravon boshqarish (faqat aylanish tezligini nominal qaymatidan pastga)
imkonini beradi. Biroq u boshqaruvchi reostatda katta quvvat
isroflari (I2ar)
bo‘lishi bilan samarali emas. Motorning quvvati oo‘gan sari,
isroflar I2ar
muttasil ortib boradi.
parallel qo‘zg‘atishli motor mexanik tavsifini ham tasvirlaydi
(18.4,a-rasm):
yakor zanjiridagi qarshilik rqo‘sh
ortishi
bilan mexanik tavsifning nishabligi ortadi, aylanish tezligi esa,
valdagi berilgan (o‘zgarmas) yuklanishda (M=MNOM),
kamayadi. Ushbu boshqarish usuli aylanish tezligini katta diapazonda
ravon boshqarish (faqat aylanish tezligini nominal qaymatidan pastga)
imkonini beradi. Biroq u boshqaruvchi reostatda katta quvvat
isroflari (I2ar)
bo‘lishi bilan samarali emas. Motorning quvvati oo‘gan sari,
isroflar I2ar
muttasil ortib boradi.
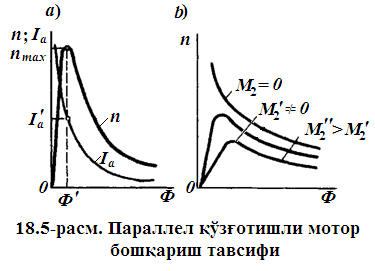
18.5-rasm. Parallel qo‘zg‘tishli motor boshqarish tavsifi
Asosiy
magnit oqimni o‘zgartirish. Palallel
qo‘zg‘atishli motorni ushbu usulda boshqarish, qo‘zg‘atish
chulg‘amidagi qo‘shimcha reostat RQ.Q
qarshiligini o‘zgartirib amalga oshiriladi. Masalan,
reostat qarshiligi kamayganda qo‘zg‘otish magnit oqimi
ortadi va aylanish tezligi kamayadi (18.5). Qarshilik RQ.Q
qiymati ortganda magnit oqim kamayadi, aylanish tezligi ortadi.
Aylanish tezligining qo‘zg‘otish tokiga
bo‘lgan bog‘liqligi
va
bo‘lganda motorning boshqarish tavsifi
![]() bilan ifodalanadi.
bilan ifodalanadi.
Ifoda
(18.5) dan ma’lumki, magnit oqimi F
kamayishi bilan aylanish tezligi p
giperbolik qonuniyat bilan ortadi (18.5,a-rasm).
Shu bilan birga, F
ning kamayishi yakor tokining
ortishiga olib keladi. Agar magnit oqim
![]() bo‘lganda
yakor toki
bo‘lganda
yakor toki
![]() ya’ni yakor zanjiridagi kuchlanish pasayuvi, yakorga keltirilgan
kuchlanishning (
ya’ni yakor zanjiridagi kuchlanish pasayuvi, yakorga keltirilgan
kuchlanishning (![]() )
yarmiga teng bo‘ladi. Bunday vaziyatda aylanish tezligi makimal
)
yarmiga teng bo‘ladi. Bunday vaziyatda aylanish tezligi makimal
![]() qiymatiga
erishadi. Magnit oqimning kamiyishi davom etaversa (
qiymatiga
erishadi. Magnit oqimning kamiyishi davom etaversa (![]() ),
yakor aylanish tezligi kamayib boshlaydi, chunki tok
ning keskin ortishi natijasida (18.9) ifodaning ikkinchi tashkil
etuvchisi birinchisiga nisbatan tezroq ortadi.
),
yakor aylanish tezligi kamayib boshlaydi, chunki tok
ning keskin ortishi natijasida (18.9) ifodaning ikkinchi tashkil
etuvchisi birinchisiga nisbatan tezroq ortadi.
Motor
valida kichik yuklanish momenti bo‘lgan-da yakorning maksimal
aylanish tezligi
nominal tezlik
![]() dan
birnecha marta katta bo‘ladi va motorning mexanik chidamliligi
nuqtai nazar-dan bunga yo‘l qo‘yib bo‘lmaydi, ya’ni motor
yakori sochilib ketishi mumkin. Bu vaziyatni e’tibor olib, reostat
qarshiligi RQ.Q
shunday
tanlanishi kerakki, uni to‘liq kiritilganda aylanish tezligi joiz
miqdoridan katta bo‘lmasin.
dan
birnecha marta katta bo‘ladi va motorning mexanik chidamliligi
nuqtai nazar-dan bunga yo‘l qo‘yib bo‘lmaydi, ya’ni motor
yakori sochilib ketishi mumkin. Bu vaziyatni e’tibor olib, reostat
qarshiligi RQ.Q
shunday
tanlanishi kerakki, uni to‘liq kiritilganda aylanish tezligi joiz
miqdoridan katta bo‘lmasin.
Masalan, 2P turdagi motorlarda joiz aylanish tezligi nominal aylanish tezligidan 2-3 martadan ortmasligi zarur. Yana bir xavf shundaki, e’tiborni qo‘zg‘otish zanjiri kontaktlari ishonchliligiga qaratish zarur, aks holda, bu kontaktlarning behosdan uzilishi natijasida, qo‘zg‘otish chulg‘ami toki nolga teng bo‘lib, magnit zanjirda magnit oqim qoldiq magnetizm oqimigacha kamayadi, unda aylanish tezligi xavfli miqdorgacha etishi mumkin.
Boshqarish
tavsifining shakli
![]() motorning validagi yuklanish momenti M2
qiymatiga bog‘liq: M2
ortishi bilan maksimal aylanish tezligi
kamayadi (18.5,b-rasm).
motorning validagi yuklanish momenti M2
qiymatiga bog‘liq: M2
ortishi bilan maksimal aylanish tezligi
kamayadi (18.5,b-rasm).
Ushbu motorni boshqarish usulining kamchiligi shundaki, magnit oqim F o‘zgarishi bilan mexanik tavsifning nishabligi o‘zgaradi.
Ko‘rilgan
boshqarish usuli sodda va iqtisodiy samaralidir, chunki parallel
qo‘zg‘otishli motorlarda qo‘zg‘otish toki yakor tokining 1-7
foizini tashkil etadi, ya’ni
![]() ,
shuning uchun boshqaruvchi reostatdagi quvvat isrofi (
,
shuning uchun boshqaruvchi reostatdagi quvvat isrofi (![]() )
juda kichik.
)
juda kichik.
Yakor zanjirida kuchlanishni o‘zgartirish. Yakor aylanish tezligini yakor kuchlanishi yordamida boshqarish uchun qo‘zg‘otish chulg‘ami magnit oqimi yoki toki o‘zgarmas ( yoki ), ya’ni mustaqil qo‘zg‘otish – yakor chulg‘ami bilan qo‘zg‘atish chulg‘ami alohida manbalardan ta’minishi zarur.
YU.i. rejimida aylanish tezligi p0 kuchlanishga proporsional, ammo kuchlanishga bog‘liq emas [(18.11) ga qarang], shuning uchun kuchlanish o‘zgarganda mexanik tavsif abssissa o‘qiga nisbatan nishablik burchagini o‘zgartirmaydi, faqat bir-biriga nisbatan balandligini o‘zgartiradi (18.4,s-rasm). Ushbu usulni amalda qo‘llash uchun yakor zanjirini kuchlanishi boshqariladigan o‘zgarmas tok manbaiga ulash zarur.