

Qisqa tutashgan rotorli asinxron motor aylanish tezligini boshqarish
Asinxron motorlarning aylanish tezligini boshqarish muammosi muhim ekspluatatsion ahamiyatga ega. Sanoatning ayrim sohalarida motorlarni boshqarish tavsiflariga juda yuqori talablar (keng diapazon bo‘lishi, ravon rostlanishi va iqtisodiy samarali bo‘lishi) qo‘yiladi.
Asinxron motorning aylanish tezligi (9.5) ifoda
![]() (9.5,a)
(9.5,a)
yordamida aniqlanadi. Bundan ko‘rinadiki, stator tokining chastotasi f1 va juft qutblar soni p ni o‘zgartirish bilan motorning aylanish tezligini boshqarish mumkin ekan.
A) Motorning aylanish tezligini juft qutblar r sonini o‘zgartib boshqarish uchun (9.4) asoslanish mumkin. Unga ko‘ra motor aylanish tezligi r ga teskari proporsionaldir. Bugungi kungacha qisqa tutashgan rotorli asinxron mashinalaridagi r ning qiymati stator chulg‘amlari o‘ralayotganda, ya’ni mashina ishlab chiqarilayotganda konkret miqdori ko‘rsatiladi va uni ekspluatatsiya jarayonida o‘zgartirib bo‘lmaydi.
Ammo, xozirgi kunda elektrotexnika fanining taraqqiyoti natijasida mashina stator chulg‘amlari qutblarini ekspluatatsiya jarayonida boshqarish imkoniyatlari O‘zbekiston olimlari tomonidan kashf etilib, ishlab chiqarishga joriy etish ishlari bajarilmoqda.
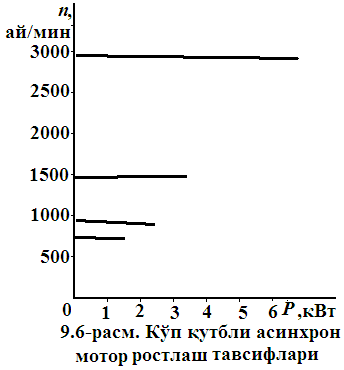
9.6-rasm. Ko‘p qutbli asinxron motor rostlash tavsiflari
Ekspluatatsiyaga joriy etilgan r ni o‘zgartirib boshqarishda r ning qiymati chulg‘am ulanishi va chulg‘am qadamiga bog‘liq bo‘ladi. Yana shuni e’tiroz etish zarurki, (9.5) ifodaga ko‘ra, r miqdori o‘zgarganda rotor aylanish tezligi pog‘onali boshqariladi, masalan, r=1 bo‘lganda n1=3000 ay/min; r=2 bo‘lganda n1=1500 ay/min; r=3 bo‘lganda n1=1000 ay/min; r=4 bo‘lganda n1=750 ay/min va h.k. (9.6-rasm).
9.7-rasmda stator chulg‘ami qutblari sonini o‘zgartirishning eng oddiy sxemasi keltirilgan. Bu sxemada stator chulg‘ami qutblari soni ikki marta o‘zgaradi. Bunda stator chulg‘amining har bir fazasi ikkiga bo‘linib, ketma-ket ulanishdan parallel ulanishga o‘tkaziladi. 1 va 2, 3 va 4-g‘altaklarning parallel ulanishi qutblar sonini ikki marta kamaytirib, motorning aylanish tezligini ikki marta oshiradi.
1 va 2, 3 va 4-g‘altaklarning parallel ulanishi qutblar sonini ikki marta kamaytirib, motorning aylanish chastotasini ikki marta oshiradi.
Agarda motorning aylanish tezligini uch yoki to‘rt karra oshirish lozim bo‘lsa, u holda statorga qo‘shimcha yana bitta chulg‘am joylashtiriladi.
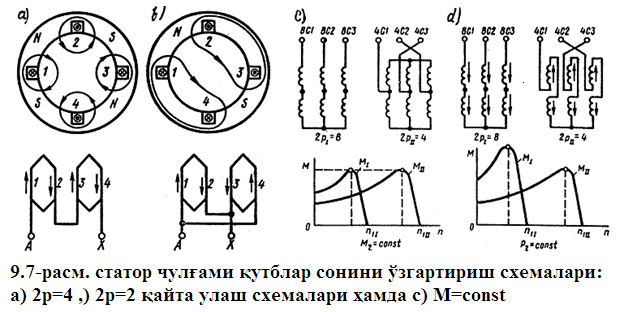
9.7-rasm. Stator chulg‘ami qutblar sonini o‘zgartirish sxemalari: a) 2p=4 b) 2p=2 qayta ulash sxemalari hamda c) M=const
Qutblar soni o‘zgartirilib, aylanish chastotasi boshqariladigan asinxron motorlarni ko‘ptezlikli motorlar deyiladi. Bunday motor rotori qisqa tutashgan bo‘ladi. 9.7-rasmda stator chulg‘ami qutblari soni 2:1 va 8:4 nisbatlarga o‘zgaradigan sxemalar ko‘rsatilgan. Bu rasmdagi «c» sxema M2=const, «d» sxema esa R2 = const hollar uchun qutblar sonini o‘zgartiradi va motorning shu rejimlarga mos bo‘lgan mexanik tavsiflari ko‘rsatilgan.
Katta gabaritli va narxi balandligi ko‘p tezlikli asinxron motorlarning asosiy kamchiliklari hisoblanadi.
Bundan tashqari tarmoq kuchlanishi chastotasi o‘zgarmas f=50Hz bo‘lganda, motorning aylanish tezligini boshqarish ravon bo‘lmay, pog‘onali bo‘ladi va juft qutblar soni r = 1; 2; 3; 4 bo‘lganda stator chulg‘ami hosil qilgan aylanuvchi magnit maydon aylanish tezligi xam o‘zgarmas n1 =3000; 1500; 1000; 750 bo‘ladi. Rotor aylanish tezligi esa yuksiz ishlash rejimida ushbu to‘rtta miqdorga yaqin bo‘lib, motorning yuklanishi ortishi bilan nishabli (pasayuvchi) bo‘ladi (9.6-rasm). Demak, bu usul bilan asinxron motorning rotori aylanish tezligini ravon boshqarib bo‘lmaydi.
Usulning yana bir kamchiligi shundaki, ko‘p tezlikli asinxron motorining nominal quvvati eng katta aylanish tezligiga mos bo‘lib, boshqarish natijasida rotor aylanish tezligining 2, 3 va 4 marta kamayishi, motorning valdagi foydali quvvati shuncha marta kamayishini anglatadi. Demak, bunday asinxron mashinalar o‘zining nominal quvvatiga doimo ham erishmas ekan.
B) Qisqa tutashgan rotorli asinxron motorning aylanish tezligini boshqarish usullaridan eng katta diapazonli (10:1 va undan kattaroq) va ravon bo‘lishini ta’minlaydigani usul bu chastotaviy boshqarish usuli, ya’ni stator chulg‘amiga keltirilgan kuchlanish chastotasini boshqarsh hisoblanadi. Buni amalga oshirish uchun o‘zgaruvchan chastotali elektr manbi, masalan, sinxron generator yoki tiristorli (tranzistorli) statik chastota o‘zgartgichlardan (CHO’) foydalaniladi (9.5-rasm). Yuqorida keltirilganidek, CHO’ sifatida mikro- va nanoelektronikaning oxirgi yutuqlaridan foydalanish asosida, tiristorli (tranzistorli) to‘g‘rilagichlar va invertorlar ishlab chiqilmoqdaki, ularning narxi kun sayin pasayib bormoqda. Bu esa CHO’larning sanoatda keng qo‘llanishiga qulay vaziyatlar tug‘dirmoqda.
Chastotali boshqarishning asosiy shartlaridan biri shundaki, mexanik tavsifga qo‘yiladigan talablarga qarab, stator tokining chastotasi o‘zgarishi bilan birga, kuchlanish amplitudasi ham ma’lum bir qonuniyat asosida o‘zgartirilishi shart.
Chastotali boshqarishning asosiy qonuniyatini birinchi marta akademik M.P. Kostenko ta’riflab bergan.
Motorning maksimal momenti taxminan (r1 qarshilik e’tiborga olinmayapti) quyidagicha bo‘ladi
 (9.6)
(9.6)
Bunda
ω=2πf1
/
p
va
![]() quyidagini hosil qilamiz
quyidagini hosil qilamiz
 (9.7)
(9.7)
bunda k1 – doimiy koeffitsient.
Chastota f1 ning ikki qiymatlaridagi maksimal momentlar nisbati
![]() (9.8)
(9.8)
bunda (1) va (2) indekslar xar xil burcha tezliklariga mos keladi.
Ifoda (9.8) ga muvofiq, umumiy hol uchun f1 chastota o‘zgarganda U1 ning o‘zgarish qonuniyatini quyidagicha ifodalash mumkin
 (9.9)
(9.9)
Agar
aylanish tezligini boshqarishda ixtiyoriy f1
uchun
mexanik tavsifning
![]() qiymati o‘zgarmas bo‘lishi (o‘zgarmas momentli boshqarish)
lozim bo‘lsa, u holda (9.9) dan quyidagini hosil qilamiz
qiymati o‘zgarmas bo‘lishi (o‘zgarmas momentli boshqarish)
lozim bo‘lsa, u holda (9.9) dan quyidagini hosil qilamiz
![]() (9.10)
(9.10)
yoki
![]() (9.11)
(9.11)
(9.9) - (9.11) ifodalarga muvofiq, motorning o‘ta yuklanish qobiliyati, quvvat koeffitsienti, aylantiruvchi moment, foydali quvvat va FIKlardan birini yoki birnechtasini talab qilingan qiymatda o‘zgarmas holda saqlash zarur bo‘lsa, chastota f1 ni o‘zgartirish bilan birga stator chulg‘amiga keltirilgan kuchlanish U1 amplitudasini ham o‘zgartirish shart ekan.
Sanoat korxonalaridagi ko‘plab elektr yuritmalarning asinxron motorlarini 9.5-rasmda keltirilgan sxema asosida, na faqat ishga tushirish rejimida, balki ishchi rejimlarida ham rotor aylanish tezligini chastotaviy boshqarish mumkin. Bunda xar hil mexanizmlar va texnologik jarayonlar uchun (9.9) – (9.11) chastotaviy boshqarish qonuniyatlari o‘zgacha va o‘ziga xosligi bilan ajralib turadi.