

Медведев Е.М., Данилин И.М., Мельников С.Р., 2007 - Лазерная локация земли и леса. Учебное пособие
.pdfфотосъемочных работ прямо зависит от заданного масштаба фотографирова-
ния. Тем не менее, как было отмечено выше, в случае лазерной локации практически эквивалентными оказываются производительность как собственно аэросъемочных работ, так и базовых процедур наземной обработки. Иными сло-
вами, темп сбора данных в основном соответствует темпу их обработки и, таким образом, приведенные оценочные значения производительности маршрут-
ной и линейной съемки соответствуют уже выдаче во многом законченных топографических данных. Совсем не так обстоят дела в классической аэрофототопографии, где по вполне объективным обстоятельствам стадии аэросъемки и
обработки могут разделять месяцы или даже годы.
5. Возможность работы в ночное время и в любое время года.
Эта возможность вытекает из того факта, что лидар является активным средством дистанционного зондирования, т.е. регистрирует собственное, а не отраженное солнечное излучение. По этой причине ничего (кроме, конечно, ус-
ловий пилотирования) не меняется при использовании воздушных лидаров в ночное время. Понятно, что такая возможность также способствует увеличению
общей производительности.
6. Чрезвычайно широкий спектр приложений.
Этот вопрос уже рассмотрен выше.
А теперь перейдем к недостаткам лазерно-локационного метода съемки.
Фактически можно говорить только об одном безусловном недостатке, а имен-
но:
Сильная зависимость от состояния атмосферы.
Признавая наличие этого недостатка, необходимо особо оговорить, что и здесь речь идет об относительном, а не об абсолютном недостатке. Следует
понимать, что сильная зависимость от состояния атмосферы, т.е. невозмож-
ность проведения аэросъемочных работ в условиях дождя, тумана, дымки, низкой облачности, – это особенность всех средств дистанционного зондирования, работающих в оптическом (т.е. видимом ультрафиолетовом и инфракрасном) диапазоне электромагнитного спектра. Серьезными преимуществами в этом
вопросе обладают только радиолокационные системы, работающие, как следу-
ет из их названия, в радиодиапазоне.
Кроме того, говоря о воздушных лазерно-локационных методах, можно было бы упомянуть о ряде существенных недостатков, вытекающих из динамического характера съемки (носитель постоянно находится в движении) и ограни-
чений в доступных ракурсах съемки (носитель в основном находится над объ-
ектом съемки). Эти недостатки, конечно же, существенны, они также во многом
ограничивают предельно достижимую точность метода. Однако их не следует считать недостатками именно воздушной лазерно-локационной съемки, так как
они присущи вообще всем аэросъемочным методам.
Иногда упоминаются другие недостатки лазерно-локационного метода съемки. Однако мы не можем их безусловно признать, так как при ближайшем
рассмотрении они оказываются не недостатками, а особенностями лазернолокационного метода, которые, безусловно, должны быть учтены на практике,
но прямо не ограничивают его информационных возможностей. Перечислим некоторые из таких особенностей:
1)не всегда достаточный уровень точности для некоторых топографогеодезических приложений;
2)дискретный характер данных;
3)снижение точности с увеличением высоты съемки;
11

4)ограничения по дальности (высоте) съемки;
5)опасность для органов зрения наземных наблюдателей.
Эти и другие особенности лазерно-локационного метода съемки будут подробно обсуждаться ниже.
1.1.2. Самые общие принципы работы воздушного лидара рассмотрим на примере прибора класса ALTM, выпускаемого канадской компанией Optech
(рис. 1, 2).
Рис. 1. Система дистанционного лазерного зондирования земной поверхности ALTM3100: съемочный блок (справа), блок управ-
ления и архивации данных съемки (слева)
(Optech, 2007). Рис. 2. Принцип работы воздушного лидара.
В качестве излучателя используется полупроводниковый лазер, как пра-
вило, ближнего инфракрасного диапазона, работающий в импульсном режиме.
Для каждого излученного импульса регистрируется время, затраченное на распространение от источника до объекта, вызвавшего отражение, и обратно к приемнику. С учетом постоянства скорости и прямолинейности распространения электромагнитных колебаний в атмосфере измеренное значение временно-
го интервала позволяет определить расстояние (в терминах лазерной локации
«наклонную дальность») от источника излучения до объекта. Кроме значения наклонной дальности D, для каждого излученного импульса регистрируется текущее значение угла α отклонения сканирующего элемента (зеркала, призмы, оптического клина). Величина этого угла позволяет однозначно определить направление распространения зондирующего луча («линию визирования») в сис-
теме координат лидара, которая «жестко» связана со строительными осями сканерного блока лидара.
В свою очередь, положение и ориентация системы координат лидара в геодезической (или географической) системе координат определяются благодаря присутствию на борту в составе лидара носителя навигационного комплекса, который обеспечивает непрерывное определение трех пространственных координат положения сканерного блока X, Y, Z и трех углов его ориентации ω, φ, κ. Такой набор шести параметров пространственного положения и угловой ориентации в фотограмметрии называется элементы внешнего ориентирова-
ния. Принцип работы бортового навигационного комплекса основан на взаимо-
действии приемника спутниковой системы GPS и инерциальной системы.
В зависимости от типа лидара могут фиксироваться более одного (до пяти) отражений от наземных объектов для каждой линии визирования. Т.е. если на пути распространения лазерного луча он сталкивается с неполным препят-
12
ствием, то часть энергии импульса отражается, а другая распространяется да-
льше вдоль линии визирования. Такая возможность способствует получению более информативных лазерно-локационных данных, так как для одного излученного импульса имеем несколько вернувшихся. Так, даже один импульс мо-
жет принести множественные отклики сразу от нескольких значимых компонентов сцены: первые отклики будут получены за счет отражений от листвы расти-
тельности, проводов и опор ЛЭП, кромок зданий, а последний отклик, как правило, соответствует поверхности земли или другой сплошной поверхности, являющейся абсолютным препятствием на пути распространения лазерного им-
пульса. Кроме поверхности земли, примером такого «абсолютного» препятствия может выступать крыша здания.
Таким образом, функциональная схема лидара в его нынешней форме не содержит никаких принципиально новых компонентов. В этом смысле с некоторыми упрощениями прибор можно было бы определить как «сканирующий ла-
зерный дальномер с навигационным обеспечением». Все основные структурные компоненты, составляющие лидар, – сканерный блок, GPS, инерциальная
система – всесторонне изучены и уже много лет эксплуатируются. Поэтому, говоря о концепции современного лидара, используемого для топографических целей, следует заявить, что принципиально новое качество данных, постав-
ляемых таким прибором, появляется именно благодаря объединению всех упомянутых компонентов в единое целое. Это произошло в начале 90-х годов
20-го века, когда использование GPS и лазерных дальномеров прочно утвердилось в аэросъемочной практике, инерциальные системы стали активно применяться для непосредственного определения элементов внешнего ориентирования, а по показателям точности все составляющие лидар источники геопро-
странственных данных достигли взаимосогласованного уровня (табл. 1).
Таблица 1. Показатели точности основных структурных компонентов типового воздушного лидара к началу 90-х годов 20-го века
Определяемый параметр |
Источник |
Точность |
Пространственные |
GPS |
8–10 см |
координаты носителя |
|
|
Наклонная дальность |
Лазерный дальномер |
10–15 см |
Ориентация носителя |
Инерциальная |
1–2 мрад. (ошибка позиционирования |
|
система |
15–30 см при высоте съемки 300 м) |
С этой поры лазерная локация является не только как средство «дистан-
ционного зондирования», но в большей степени как «фотограмметриеское средство». Последнее предполагает наличие гарантий точности геопривязки
данных съемки и пространственных измерений. С появлением первых лидаров гарантии точности были представлены производителями и выражались в том, что специфицируемая точность лазерно-локационных данных составляла 15–
20 см в абсолютных геодезических координатах.
1.1.3. Для правильного понимания содержания и значения лазерно-лока-
ционного метода съемки необходимо, прежде всего, понять характер поставляемых лазерно-локационных данных. В качестве наиболее общего понятия в
литературе все чаще используют термин лазерно-локационное изображение, которое, однако, не является изображением в традиционном понимании этого термина.
В настоящее время различают два основных вида лазерно-локационных
13

данных и соответственно два основных вида лазерно-локационных изображе-
ний:
1)в дальномерной форме;
2)в форме интенсивности отраженного импульса.
Представленное деление в равной степени применимо как к воздушным, так и к наземным лазерно-локационным данным. Соответствующие примеры
приведены на рисунках 3, 4, 5.
Рис. 4. Типовое лазерно-локационное изображение в дальномерной форме, полученное методом наземого лазерного сканирования.
Представим необходимые пояснения. Более корректно с нашей точки зрения говорить не о
двух видах лазерно-локационных
данных, а о двух формах представления, так как сами данные в обоих случаях одни и те же.
Иными словами, нет никаких
отдельных приемов для получе-
ния одного из двух основных видов ЛЛ данных. Оба вида возникают одновременно и в тесной связи друг с другом. Поэтому более правильно говорить именно о формах представления, а не о видах.
Дальномерная форма представления соответствует распределению в ко-
ординатном пространстве трехмерного облака лазерных точек. Термин лазерная точка используется здесь и в дальнейшем для обозначения единичного первичного лазерно-локационного измерения. Т.е. важнейшими численными параметрами, характеризующими каждую лазерную точку, являются значения пространственных координат Xp, Yp, Zp в некоторой заранее заданной системе
координат. Распределение лазерных точек образует пространственный образ объекта съемки, который доступен визуальному анализу, проведению простра-
нственных измерений и применению вычислительных методов геоморфологического анализа. Такой образ и составляет то, что принято называть лазернолокационным изображением в дальномерной форме.
Наряду с пространственными координатами точки объектового пространства, вызвавшего отражение лазерного импульса, современные лидары способны регистрировать интенсивность отраженного импульса I, т.е. значение энергии импульса, вернувшейся на приемник излучения. Забегая вперед, укажем, что эта доля зависит от многих факторов, среди которых двунаправленная спектральная отражательная способность объекта, фактическое значение да-
14
льности, величины пропускания, рассеивания и собственного излучения атмо-
сферы и другие параметры. Однако с практической точки зрения важно то, что лазерно-локационное изображение в форме интенсивности по своим информационным свойствам чрезвычайно близко к естественным черно-белым фото-
графиям (аэрофотоснимкам в случае воздушного применения), что позволяет успешно использовать их для целей визуального распознавания объектов и ка-
мерального дешифрирования даже без привлечения традиционных аэрофотосъемочных данных.
Для того, чтобы закончить формальное описание лазерно-локационных
данных, дополним уже введенный набор численных параметров Xp, Yp, Zp, I, характеризующих каждую лазерную точку значением t – время регистрации дан-
ной лазерной точки. В результате у нас впервые появляется возможность формально определить такое понятие, как набор лазерно-локационных данных, а именно:
L = {Xpi ,Ypi , Zpi , Ii ,ti} I = 1,…,N,
где L – означает весь рассматриваемый набор лазерно-локационных данных, N – общее количество лазерных точек в наборе L.
Представленная форма соответствует самому простому случаю и в дальнейшем будет нами уточняться.
1.2.Справка по истории лазерной локации
1.2.1.Как уже было сказано выше, приборы, которые сегодня принято называть лидарами или лазерными сканерами, можно рассматривать как механическое совмещение двух независимых (т.е. практически невзаимодействующих
в процессе съемки) компонентов, а именно – дальномерного (сканерного) блока
и навигационного комплекса типа GPS+Инерциальная система. Это замечание очень важно, так как позволяет лучше проследить историю возникновения ла- зерно-локационных систем и их практического применения. С практической точки зрения такое деление значительно упрощает изучение реальной точности
лидаров, так как позволяет анализировать влияние этих двух компонентов на
характер получаемых данных, в частности на их точность, раздельно. Примерно 20 лет назад была предложена законченная теория электронно-
оптических измерений в геодезии (Шануров, 1991), которая с успехом может быть использована для оценки функциональных возможностей дальномерного
блока современного лазерного сканера, использующего, как известно, твердо-
тельный лазер в качестве излучателя. Такая теория позволяет получить оценку
достижимой точности, разрешающей способности, влияния атмосферных условий и других практически значимых параметров. Практически полностью заим-
ствована и терминология. Так, лазерные сканеры делятся на когерентные и некогерентные, использующие фазовый или импульсный метод измерения дальности. Приходится признать, что лазерная локация как отдельная дисциплина
пока не внесла ничего принципиально нового в теоретическую дальнометрию, что, впрочем, облегчает ее освоение.
Что касается второго главного компонента сканера – навигационного комплекса, обеспечивающего каждое первичное измерение полным набором эле-
ментов внешнего ориентирования, то, как указано выше, его работа строится на взаимодействии в реальном времени GPS/ГЛОНАСС приемника и инерциаль-
ной системы. Развитие и совершенствование таких систем происходит очень
бурно в последнее десятилетие, и следует признать это направление в высшей
15
степени инновационным и с теоретической, и с технологической точек зрения.
Однако широкое использование комбинированных GPS/INS систем является тенденцией современного авиационного дистанционного зондирования вообще, а не только лазерной локации. Такие системы применяются и с аэрофото-
аппаратами, с телевизионными и тепловизионными сканерами, и с радиолокационными системами. Поэтому неверно было бы понимать GPS/INS метод по-
строения навигационного решения исключительно как атрибут лазерной локации.
1.2.2. Родословная современных лазерных сканеров отразилась на терми-
нологии. В отечественной и зарубежной литературе пока нет устоявшегося термина для обозначения приборов этого типа. Одновременно используются
термины «лазерный локатор» (laser locator), «лазерный сканер» (laser scanner) и «лидар» (lidar). В России чаще говорят «лазерный сканер», а за рубежом – «lidar». В таблице 2 представлены основные достоинства и недостатки исполь-
зуемых терминов.
Таблица 2. Сводная таблица взаимозаменяемых терминов, определяющих понятие «лазерная локация»
Термин |
Достоинства |
Недостатки |
Лазерное |
До настоящего времени наиболее употреби- |
Не в полной мере соответствует |
сканирование |
тельный термин в зарубежной литературе |
сути явления. Не удобен грамма- |
|
|
тически |
|
Наиболее точно описывает явление. Соот- |
Менее употребителен в зарубеж- |
Лазерная |
ветствует отечественной традиции (оптичес- |
ной литературе |
локация |
кая локация, световая локация) |
|
|
|
|
|
Достаточно точно описывает явление: Light |
|
|
Deection and Ranging. Выражает этимологи- |
|
Лидар (LIDAR) |
ческую преемственность с термином «радар» |
Нет |
|
– RADAR, Radio Detection and Ranging. В пос- |
|
|
леднее время становится все более употре- |
|
|
бителен в зарубежной литературе |
|
Взаключение этого короткого раздела представим график, который выражает динамику изменения важнейшего технического параметра, характеризующего производительность воздушных лидаров (рис. 6). В дальнейшем будет показано, что таким параметром является частота зондирующих импульсов, или,
что тоже самое, количество первичных измерений в секунду. Как видно из ри-
сунка 6, за десять лет с момента появления лидаров их производительность
возросла более чем на порядок. Именно этот стремительный рост производи-
тельности в течение последних десяти лет определял технологические и экономические условия, в которых развивалась лазерная локация в России и в мире в целом.
1.3.Импульсный и фазовый метод измерения дальности
Всовременной лазерной локации используются два основных метода из-
мерения наклонной дальности – импульсный и фазовый. Сразу оговоримся, что в лидарах воздушного базирования в настоящее время используется только
импульсный метод, а в наземных лидарах – и импульсный, и фазовый. Причи-
ны этого явления мы обсудим позднее, а пока рассмотрим эти два метода измерения дальности подробно.
16

120 |
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
KHz |
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
Частота, |
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
1994 |
1996 |
1998 |
2000 |
2002 |
2004 |
2006 |
2008 |
|
|
|
|
Годы |
|
|
|
Рис. 6. Рост производительности лазерных локаторов импульсного типа. |
|
|
|||||
Импульсный метод
Реализация импульсного метода измерения наклонной дальности предпо-
лагает определение времени распространения короткого лазерного импульса
от источника излучения до объекта и обратно до приемника. С учетом постоянства скорости распространения электромагнитных колебаний в атмосфере c = 3 108 м/c, замеренная продолжительность распространения лазерного импульса Ti позволяет определить наклонную дальность Di по простой формуле:
|
|
|
D = |
Ti |
|
|
|
|
|
|
|||
|
|
|
i |
2 c |
||
|
|
|
|
|||
|
|
|
На рисунке 7 представлена типовая форма |
|||
|
|
|
зондирующего лазерного импульса в лидарах типа |
|||
|
|
|
ALTM канадской компании Optech Inc., а на рисунке |
|||
|
|
|
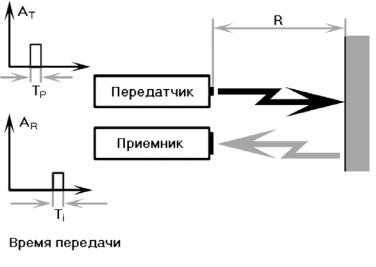
8 показана принципиальная схема приемопередат- |
|||
Рис. 7. Типовая форма зон- |
чика при реализации данной схемы измерения. |
|||||
дирующего |
импульса |
при |
Как следует из описания, реализация импуль- |
|||
сного метода измерения дальности сравнительно |
||||||
импульсном |
методе |
лока- |
||||
ции. |
|
|
проста в функциональном отношении. Поэтому и |
|||
аппаратная реализация этого метода не вызывает
серьезных проблем, что в качестве положительного следствия имеет достиже-
ние устойчивости и достоверности получаемых данных.
Представим некоторые дополнительные соображения, характеризующие импульсный метод:
1. По возможности, должна быть обеспечена минимальная длительность
зондирующего импульса и его максимальная добротность (т.е. максимально
крутой передний фронт). Это требование представляется вполне естественным.
17
|
|
Совершенно |
ана- |
|||
|
логичные |
требования |
к |
|||
|
форме |
|
зондирующего |
|||
|
импульса предъявляют- |
|||||
|
ся |
в |
радиолокации |
и |
||
|
других |
технологиях |
ак- |
|||
|
тивного зондирования. |
|
||||
|
|
2. |
Описанная |
схе- |
||
|
ма |
измерений предпо- |
||||
|
лагает постоянство ско- |
|||||
|
рости |
и прямолинейно- |
||||
|
сть |
|
распространения |
|||
|
лазерного |
импульса |
в |
|||
|
атмосфере. Строго го- |
|||||
Рис. 8. Принципиальная схема приемопередатчика при им- |
воря, это не совсем так |
|||||
с учетом явления реф- |
||||||
пульсном методе. |
ракции, которое приво- |
|||||
|
||||||
дит к искривлению оптического пути импульса. Это явление проявляется тем
сильней, чем больше высота съемки. Для последней разработки компании Optech Inc. лидара ALTM 3100 фактическая высота съемки может достигать боль-
ших значений – до 4000 м. На таких высотах влияние рефракции для лазерных
точек, полученных на краях полосы съемки, уже сопоставимо с точностью метода. Это обстоятельство вынуждает принимать специальные меры для коррекции координат лазерных точек на этапе наземной обработки. Коррекция проводится с использованием аналитических зависимостей, описывающих ве-
личину рефракции в зависимости от текущих физических параметров атмосфе-
ры, таких как температура и давление на уровне земли.
Сводная таблица 3 содержит концептуальные достоинства и недостатки импульсного метода измерений наклонной дальности.
Таблица 3. Основные достоинства и недостатки импульсного метода
измерения дальности
Достоинства |
Недостатки |
– высокая устойчивость метода из- |
– ограничения по достижимой точности и |
мерения; |
разрешающей способности; |
– сравнительно простая схема оп- |
– принципиальное ограничение произво- |
тико-электронного тракта; |
дительности при использовании одиноч- |
– возможность регистрации множе- |
ного приемника по норме «высота съем- |
ственного отражения. |
ки – частота импульсов». |
Обсудим важнейшие недостатки импульсного метода измерения дально-
сти.
1. Как и во всех других родственных технологиях, в лазерной локации при-
нято считать, что импульсный метод проигрывает по точности фазовому. Это происходит потому, что фактическая точность каждого измерения зависит от
ряда параметров, каждый из которых может оказать на точность конкретного измерения. Таковыми параметрами являются:
– длительность и форма (в частности, крутизна переднего фронта) зондирующего импульса;
18

–отражательные характеристики объекта;
–оптические свойства атмосферы;
–текстура и ориентация элементарной поверхности объекта вызвавшей отражение зондирующего луча по отношению к линии визирования;
–другие.
Влияние всех перечисленных выше параметров сводится к ослаблению
«размыванию» формы отраженного импульса на входе оптической схемы приемника, т.е. к возрастанию неопределенности в измерении длительности задержки распространения зондирующего импульса до объекта и обратно. По-
вышение этой неопределенности на практике оборачивается снижением точности. Как будет показано ниже, фазовый метод во многом свободен от этого не-
достатка.
2) Принципиальное ограничение производительности по норме «высота съемки – частота импульсов» состоит в следующем. Из представленной выше
функциональной схемы лидара импульсного типа видно, что каждый следующий зондирующий импульс может быть излучен только после того, как зареги-
стрирован предыдущий отраженный импульс. С учетом конечной скорости распространения электромагнитных колебаний можно определить простое соот-
ношение, которое определяет теоретический предел частоты зондирующих импульсов fmax в зависимости от высоты съемки H, а именно:
fmax = 2 cH
Значения fmax , рассчитанные в соответствии с данной формулой, приведе-
ны в таблице 4.
Таблица 4. Максимально возможные значения частоты зондирующих импульсов в зависимости от высоты съемки при импульсном методе
Высота съемки |
Максимально возможная частота |
(H), м |
зондирующих импульсов (fmax), КГц |
300 |
500 |
1500 |
100 |
3000 |
50 |
Представленные в таблице 4 значения частот являются теоретически мак-
симально возможными. На практике они несколько меньше.
Отметим также, что данное принципиальное ограничение в той или иной
степени относится и ко всем другим методам активного дистанционного зондирования. Здесь оно упомянуто потому, что, как было сказано выше, в авиационной лазерной локации в настоящее время используются исключительно импу-
льсные методы. Поэтому это ограничение существенно на практике, принимая во внимание значительные высоты съемки.
Дальнейшим развитием импульсного метода является так называемый
метод регистрации формы отраженной волны (wave form registration). Практи-
ческую реализацию данного метода обеспечивают, например, лидары ALTM
30/70 и ALTM 3100 в качестве опции к базовому импульсному методу измере-
ния.
19

Технология регистрации формы отраженной волны предполагает запись в
цифровом виде полной формы отклика на каждый зондирующий импульс с частотой дискретизации 1 ГГц и выше. Зарегистрированная таким образом волна дает «историю» отражения зондирующего импульса от всех препятствий, вст-
ретившихся на его пути (рис. 9). Наибольший интерес такая информация мо-
|
жет представлять для использова- |
|
|
ния в специализированном прог- |
|
|
раммном обеспечении |
обработки |
|
лазерно-локационных данных для |
|
|
более достоверного распознавания |
|
|
и геопозиционирования |
объектов |
|
различных классов. |
|
|
Другим возможным |
приложе- |
Рис. 9. К определению метода регистрации фо- |
нием может явиться использова- |
|
ние данных такого рода для норма- |
||
рмы отраженной волны. |
лизации изображений распределе- |
|
ния интенсивности с учетом высоты полета и угла падения зондирующего луча.
Перейдем к рассмотрению фазового метода.
Рисунок 10 представля-
ет принцип определения на-
клонной дальности при использовании фазового метода. Этот принцип состоит в определении количества це-
лых длин волн между лока-
тором и объектом и разности фаз излученной и принятой волны модулирующего колебания. Ширина полосы моду-
ляции до 10 ГГц при исполь-
зовании современных лазе-
рных диодов (semiconductor laser diodes). Отметим, что в
этом случае зондирующее излучение должно быть непрерывным, что в общем случае значительно повышает требования по выходной мощности излучающего лазера по сравнению с импульсным методом.
Напомним, что фазовый метод измерения дальности пока применяется только в лидарах наземного базирования.
Главное преимущество фазового метода измерения – более высокая точ-
ность, которая может достигать первых миллиметров. Вообще фазовые изме-
рения в оптической и радиодальнометрии (в том числе в GPS и ГЛОНААС методах) считаются самыми точными. Для того чтобы пояснить это положение
рассмотрим фазовый метод измерения несколько более подробно.
Для того, чтобы определить расстояние между источником и объектом, не-
обходимо:
1. Определить целое количество длин волн модуляции K, приходящихся
на это расстояние.
20