

15. Плоское движение твердого тела. Скорости точек плоской фигуры. Ускорения точек плоской фигуры.
http://botva-project.ru/library/%D0%9F%D0%BB%D0%BE%D1%81%D0%BA%D0%BE%D0%B5_%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5.pdf
Плоским движением твердого тела называется такое его движение, при котором каждая точка тела движется в плоскости, параллельной некоторой неподвижной плоскости
Рассмотрим методы, с помощью которых можно определить скорости точек тела, совершающего плоское движение.
+1. Метод полюса. Этот метод основывается на полученном разложении плоского движения на поступательное и вращательное. Скорость любой точки плоской фигуры можно представить в виде двух составляющих: поступательной, со скоростью равной скорости произвольно выбранной точки – полюса, и вращательной вокруг этого полюса

Теорема: ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения этой точки во вращательном движении фигуры вокруг полюса.
Ускорения точек плоской фигуры
Формула распределения ускорений при плоском движении тела имеет вид:
![]()
где ![]() - ускорение
полюса, точки
,
в поступательном движении;
- ускорение
полюса, точки
,
в поступательном движении;
![]() - относительное
ускорение точки
- относительное
ускорение точки ![]() в
ее вращательном движении вместе с телом
вокруг полюса
;
в
ее вращательном движении вместе с телом
вокруг полюса
;
![]() - ускорение
любой точки
тела.
- ускорение
любой точки
тела.
Ускорение любой точки плоской фигуры равно геометрической сумме ускорения точки, которую выбрано за полюс, и ускорения точки при его вращении вместе с телом вокруг этого полюса. |
Графическое определение ускорения точки выполняется следующим образом (рис.4.16):
Из точки откладывают вектор , который равен ускорению полюса ;
Под углом
 к
к  проводят
вектор
,
отклоненный в сторону углового
ускорения
проводят
вектор
,
отклоненный в сторону углового
ускорения  ,
причем
,
причем

Модуль и направление ускорения определяется диагональю параллелограмма, который построен на векторах и как на сторонах.
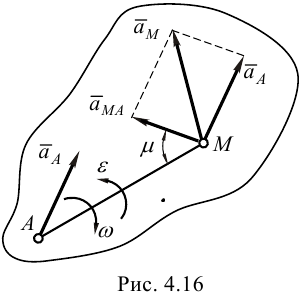
Вычисление величины ускорения точки с помощью рассматриваемого параллелограмма затрудняет расчеты, поскольку предварительно надо определить угол между векторами и .
Учитывая, что представляет собой относительное ускорение точки в ее относительном вращательном движении вокруг полюса , то это ускорение можно разложить на относительную тангенциальную (касательную) и относительную нормальную (центростремительную) составляющие:
![]()
где

Вектор ![]() направлен
перпендикулярно
направлен
перпендикулярно ![]() в
сторону углового ускорения, а
вектор
в
сторону углового ускорения, а
вектор ![]() всегда
направлен от точки
к
выбранному полюсу
(рис.4.17).
всегда
направлен от точки
к
выбранному полюсу
(рис.4.17).
Тогда уравнение (4.10) примет вид:
![]()
Если
точка
,
которая выбрана за полюс поступательного
движения, движется не прямолинейно, то
ее ускорение, в свою очередь, тоже можно
разложить на тангенциальную ![]() и
нормальную
и
нормальную ![]() составляющие:
составляющие:
![]()

Было
отмечено, что движение плоской фигуры
можно рассматривать как слагающееся
из поступательного движения, при котором
все точки фигуры движутся со
скоростью ![]() полюса А,
и из вращательного движения вокруг
этого полюса. Покажем, что скорость
любой точки М фигуры
складывается геометрически из
скоростей, которые точка получает в
каждом из этих движений.
полюса А,
и из вращательного движения вокруг
этого полюса. Покажем, что скорость
любой точки М фигуры
складывается геометрически из
скоростей, которые точка получает в
каждом из этих движений.
В
самом деле, положение любой точки М фигуры
определяется по отношению к
осям Оху радиусом-вектором ![]() (рис.3),
где
(рис.3),
где ![]() -
радиус-вектор полюса А,
-
радиус-вектор полюса А, ![]() -
вектор, определяющий положение
точки М относительно
осей
-
вектор, определяющий положение
точки М относительно
осей ![]() ,
перемещающихся вместе с
полюсом А поступательно
(движение фигуры по отношению к этим
осям представляет собой вращение вокруг
полюса А).
Тогда
,
перемещающихся вместе с
полюсом А поступательно
(движение фигуры по отношению к этим
осям представляет собой вращение вокруг
полюса А).
Тогда
![]()
В
полученном равенстве величина ![]() есть
скорость полюса А;
величина же
есть
скорость полюса А;
величина же ![]() равна
скорости
равна
скорости ![]() ,
которую точка М получает
при
,
которую точка М получает
при ![]() ,
т.е. относительно осей
,
т.е. относительно осей ![]() ,
или, иначе говоря, при вращении фигуры
вокруг полюса А.
Таким образом, из предыдущего равенства
действительно следует, что
,
или, иначе говоря, при вращении фигуры
вокруг полюса А.
Таким образом, из предыдущего равенства
действительно следует, что
![]() .
.
Скорость , которую точка М получает при вращении фигуры вокруг полюса А:
![]() ,
,
где ω - угловая скорость фигуры.
Таким
образом, скорость любой точки М плоской
фигуры геометрически складывается из
скорости какой-нибудь другой точки А,
принятой за полюс, и скорости, которую
точка М получает
при вращении фигуры вокруг этого полюса.
Модуль и направление скорости ![]() находятся
построением соответствующего
параллелограмма (рис.4).
находятся
построением соответствующего
параллелограмма (рис.4).


Рис.3 Рис.4