

4. Теорема о трех силах. Примеры.
Теорема. Если свободное абсолютно твердое тело находится в равновесии под действием трех непараллельных сил, лежащих на одной плоскости, то линии действия этих сил пересекаются в одной точке.
Доказательство.
Пусть на абсолютно твердое тело, находящееся в равновесии действуют три непараллельные силы F⃗ 1F→1, F⃗ 2F→2 и F⃗ 3F→3 как указано на рис. С.17а.

|
|
Теперь, как следует из рис.С.17б тело находится в равновесии под действием системы состоящей из двух сил {F⃗ 3,R⃗ }{F→3,R→} и в соответствие с аксиомой №1 эти силы действуют вдоль одной прямой. Следовательно, линии действия сил F⃗ 1F→1 , F⃗ 2F→2 и F⃗ 3F→3 имеют общую точку пересечения, точку OO и образуют сходящуюся систему сил.
Пример.
Стержень ABAB в точке AA опирается на неподвижный шарнир, а в точке CC на выступ (рис.С.18).

Определить направления реакций в опорах (точках AA и CC).
Решение.
Решение приведено графически на рис.С.19.
|

5. Связи. Реакции связей. Основные типы реакций связей. Примеры.
По определению, тело, которое может совершать из данного по
ложения любые перемещения в пространство, называется свободным
(например, воздушный шар в воздухе). Тело, перемещениям кото
рого в пространстве препятствуют какие-нибудь другие, скреплен
ные или соприкасающиеся с ним, тела, называется несвободным.
Все то, что ограничивает перемещения данного тела в пространстве,
называют связью.
Связями будем называть все тела, которые ограничивают перемещение данного тела.
Сила, с которой данная связь действует на тело, называется реакцией связи.
1. Гладкая поверхность.
Р еакция
гладкой поверхности перпендикулярна
этой поверхности.
еакция
гладкой поверхности перпендикулярна
этой поверхности.
2. Невесомый стержень.
Р еакция
стержня всегда направлена вдоль его
оси. Стержень может работать и на сжатие
и на растяжение.
еакция
стержня всегда направлена вдоль его
оси. Стержень может работать и на сжатие
и на растяжение.
3. Неподвижный цилиндрический шарнир.
Ка к
правило, направление реакцииRA заранее
не известно, поэтому ее раскладывают
по двум известным направлениям, например,
по направлению координатных осей.
к
правило, направление реакцииRA заранее
не известно, поэтому ее раскладывают
по двум известным направлениям, например,
по направлению координатных осей.
4. Подвижный цилиндрический шарнир.
Р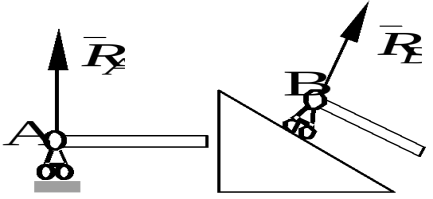 еакция
перпендикулярна плоскости возможного
перемещения шарнира.
еакция
перпендикулярна плоскости возможного
перемещения шарнира.
5. Жесткая
заделка.
Жесткая
заделка.
Реакция в данном случае состоит из трех компонентов: двух составляющих силы XA, YA и реактивного момента M неизвестного направления (понятие момента силы будет рассмотрено позже).
6. Скользящая заделка.
+Ре акция
включает силу, перпендикулярную оси
заделки, и реактивный момент.
акция
включает силу, перпендикулярную оси
заделки, и реактивный момент.
Пример.
Брус DE закреплен в точке D неподвижным шарниром, а в точке Е опирается на гладкую поверхность стены (рис.С.12а).

Для бруса DE связями служат два тела: неподвижный шарнир D и гладкая поверхность стены.
Раскладываем реакцию неподвижного шарнира на две составляющие X⃗D→D и Y⃗D→D и показываем на чертеже предполагаемые направления этих составляющих.
Реакция гладкой стены приложена в точке Е касания балки и стены и направлена по нормали к стене (рис.С.12б).
На рис.С.13 приведен также пример использования опирания на неподвижный шарнир и гладкий выступ.
