

Конспект до лекції 2
.pdfТема 2. Аналітичне розв’язання задач орієнтування моделі
Тематичний план
2.1.Задача аналітичного взаємного орієнтування пари знімків.
2.2.Сумісне визначення елементів взаємного орієнтування та передача масштабу для двох суміжних моделей.
2.3.Задача абсолютного орієнтування моделі
2.1. Задача аналітичного взаємного орієнтування пари знімків.
2.1.1. Строгий спосіб
Задача полягає у знаходженні елементів взаємного орієнтування у вибраній системі - лінійно-кутовій чи базисній. Для обох систем порядок розв’язання задачі однаковий, а різниця полягає лише в тому, що в лінійно-кутовій системі використовується рівняння (1.13), а в базисній рівняння (1.17).
Ці рівняння отримані нами раніше. Подамо розв’язок для обох систем.
Для базисної системи необхідно знайти елементи взаємного орієнтування л , п , л , п , п . Рівняння взаємного орієнтування
F =Y Z |
−Y Z |
= 0 |
||
1 |
2 |
2 |
1 |
|
є нелінійним стосовно визначуваних елементів взаємного орієнтування. лінеаризації шляхом розкладання функції (2.1) в ряд Тейлора:
(2.1)
Використаємо прийом
F = F |
+ |
F |
d |
|
+ |
F |
d |
|
+ |
F |
d |
|
+ |
F |
d |
|
+ |
F |
d |
|
= 0 |
|||||
|
|
л |
|
|
л |
|
|
п |
|
|
п |
|
|
п |
||||||||||||
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
л |
|
|
|
л |
|
|
|
п |
|
|
|
п |
|
|
|
п |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(2.2)
Вводячи позначення для частинних похідних
a = |
F |
, |
b = |
F |
, |
c = |
F |
|||
|
|
|
|
|
|
|||||
|
л |
|
|
л |
|
|
п |
|||
|
|
|
|
|
|
|
|
|||
,
d = |
F |
|
|
||
|
||
|
п |
,
e = |
F |
|
|
||
|
||
|
п |
,
(2.3)
для початкового значення функції Fo = l , приймаючи до уваги, що вимірювання на помилками, запишемо (2.2) у вигляді рівняння
(2.4)
знімках супроводжується випадковими поправок:
a л + b л + c п + d п + e п + l = v . |
(2.5) |
Конкретні математичні вирази для частинних похідних a, b, c, d, e |
та вільного члена l |
отримують диференціюванням (2.1) з врахуванням залежностей визначення координат точок
|
|
до системи координат знімка) та виразів для напрямних |
об’єкта (переходу від системи SX Y Z |
|
косинусів. Подамо ці формули в кінцевому вигляді:
a = −X |
Y , |
|
|
b = Z B − Y C, |
|
|
|
c = Y X |
, |
|
|
||||||||||||
|
1 |
2 |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
1 |
2 |
|
|
|
d = Y E − Z |
F , |
e = Y |
C − Z |
B |
|
|
|
|
|
||||||||||||||
1 |
|
1 |
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
E = Y cos |
п |
, |
|
|
C = c |
2 |
x |
1 |
− c |
y |
|
, |
B = b x |
1 |
|||||||||
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
2 |
||||||
|
|
|
|
|
|
|
C = c x |
2 |
− c y |
2 |
, |
B = b x |
2 |
||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
2 |
|
|||||
F = x b sin |
п |
− y b cos |
п |
+ |
f |
|
cos |
п |
, |
|
|
|
|||||||||||
2 |
|
3 |
|
|
|
2 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
l = Y1 Z2 − Z1Y2 .
Тут індекс 1 стосується лівого знімка, індекс 2 – правого знімка; b1, b2, c1, c2 – напрямні косинуси для лівого знімка,
b1 , b2 , b3 , c1 , c2 - напрямні косинуси для правого знімка.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− b y |
|
|
, |
|
|
1 |
|
||||
1 |
|
||||
− b y |
|
|
|
||
|
|
, |
|||
1 |
|
2 |
|
||
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
(2.6)

Якщо вибираємо лінійно-кутову систему , то маємо рівняння (2.7):
F = (Y Z |
− Y Z ) − tg |
( X |
Z |
− X Z |
) + |
tg |
( X Y − X Y ) = 0 |
|
|
|
||||||||
|
|
|
|
|||||||||||||||
1 |
2 |
2 |
1 |
|
1 |
2 |
2 |
1 |
|
cos |
1 |
2 |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подальші дії аналогічні, як і для базисної системи. |
|
|
|
|
||||||||||||||
Опускаючи проміжні викладки, запишемо рівняння поправок: |
|
|
||||||||||||||||
|
|
|
|
a + b + c + d + e + l = v . |
||||||||||||||
Тут частинні похідні |
a, b, c, d, e мають вигляд: |
|
|
|
|
|
|
|||||||||||
|
|
|
a = −(x Z |
+ fX ) sec |
2 |
− (x Y − y |
X )tg sin |
/ cos |
2 |
, |
||||||||
|
|
|
|
|
||||||||||||||
|
|
|
1 |
2 |
|
|
2 |
|
|
|
1 |
2 |
1 |
2 |
|
|
|
|
b= (x1Y2 − y1 X 2 ) sec 2 / cos ,
c= ( y1 − x1tg )X 2 + ( ftg + y1tg /cos )Z2 ,
d = −( ftg + y |
tg |
/ cos )[a |
3 |
(x |
2 |
sin + y |
2 |
cos ) − f sin sin ] + |
|||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
+ ( f |
+ x tg /cos )[b |
(x |
2 |
sin + y |
2 |
cos ) + f cos ] + |
|||||||||||
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||
+ ( y |
− x tg )[c |
3 |
(x |
2 |
sin + y |
2 |
cos ) + f |
cos sin ], |
|||||||||
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
e = ( ftg + y |
tg /cos )(a |
1 |
y |
2 |
− a |
2 |
x |
2 |
) − ( f |
+ x |
tg / cos )(b y |
2 |
− b x |
2 |
) − |
|||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
2 |
|
|||||||
− ( y |
1 |
− x |
tg )(c |
1 |
y |
2 |
− c |
2 |
x |
2 |
). |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(2.7)
(2.8)
(2.9)
Вільний член l обчислюється за формулою (2.6).
Тут індекс 1 стосується лівого знімка, індекс 2 – правого знімка. Напрямні косинуси а1, а2, b1,
b2, c1, c2 стосуються правого знімка. |
|
|
|
|
|
|
Повернемось до геометричного змісту задачі |
(рис.1.3). . Що означає |
порушення взаємного |
||||
орієнтування (положення) базису B та знімків? |
|
|
|
|
|
|
Очевидно, це викличе те, що промені R1 і R2 |
не перетнуться в точці |
A . Якщо спостерігати |
||||
|
|
|
|
|
||
стереоскопічно модель, побудовану зі стереопари P − P , то це означатиме, що в точці A |
||||||
|
1 |
2 |
|
|
||
матимемо поперечний паралакс. Отже, поперечний паралакс – це |
наслідок порушення |
|||||
взаємного орієнтування, а значить, вимірявши його в декількох точках стереопари, можемо знайти елементи взаємного орієнтування. Так як кожен вимір точки моделі дає одне рівняння точки, а невідомих маємо п’ять, то значить, що на стереопарі необхідно провести виміри щонайменше в п’яти точках. При використанні аналітичного способу число точок n , як правило, значно більше, і це дозволяє точніше визначити елементи взаємного орієнтування. При n>5 застосовують метод найменших квадратів (МНК).
Послідовність розв’язання задачі (для обох систем взаємного орієнтування) така:
1. Задаються наближеними значеннями елементів взаємного орієнтування
|
o |
, |
o |
, |
o |
, |
o |
, |
o |
( |
o |
, |
o |
, |
o |
, |
o |
, |
o |
л |
л |
п |
п |
п |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
)
.
2.Для кожної виміряної точки стереомоделі (тобто для ідентичних точок на лівому і правому знімках) обчислюють коефіцієнти та вільний член рівнянь поправок за
формулами (2.6) або (2.9) і умови r = k R .
В результаті цих дій формується матриця коефіцієнтів
a1a A = 2
n,5 ...
an
та матриця-стовпчик вільних членів
b1 |
c1 |
d1 |
e1 |
|
||||
b |
|
c |
|
d |
|
e |
|
|
|
2 |
|
1 |
|
2 |
|
2 |
|
... ... ... |
... |
|||||||
bn |
cn |
d n |
|
|
|
|||
en |
||||||||
L = [l1l2 ...ln ]T
n,1
(2.10)
( 2.11)

3. З усіх рівнянь поправок (2.5) чи (2.8), враховуючи матричний запис (2.10) і (2.11) отримуємо систему рівнянь поправок
A X + L n,5 5,1 n,1
= V n,1
,
(2.12)
де X - матрицястовпчик шуканих поправок до наближених значень елементів взаємного орієнтування
або
X = [ |
л |
x |
л |
|
п |
|
п |
5,1 |
|
|
|
||||
|
|
|
|
|
|
|
|
X = [ |
|
|
|
|
|
|
|
5,1 |
|
|
|
|
|
|
|
x
п ]
]
T
T
.
,
(2.13)
(2.13’)
Накладаючи умову мінімізації поправок |
|
|
|
|
V |
T |
V |
= min , |
|
|
|
|
|
|
|||||
отримаємо систему нормальних рівнянь |
|
|
|
|
|
|
|
|
|
|
AA |
T |
|
|
|
T |
|||
|
|
X + A L = 0 |
|||||||
та розв’язок |
X = −( A |
T |
A ) |
−1 |
A |
T |
L |
|
|
|
|
|
|
||||||
4. Обчислюють уточнені значення шуканих невідомих
(2.14)
(2.15)
(2.16)
= o
лл
л = лo
= o
пп
= o
пп
= o
пп
+ л , |
|
+ л , |
(2.17) |
|
|
+ п , |
|
+ п , |
|
+ п . |
|
Для елементів в лінійно-кутовій системі обчислення аналогічні.
5. Оскільки ми використовували прийом ліанеризації нелінійних функцій, то для досягнення точного результату застосовуємо метод послідовних наближень (ітераційний процес).
Тому перевіряємо ітераційний процес на збіжність:
|
|
i |
i+1 |
, |
|
|
|
л − л |
|
||
|
|
л |
− л |
, |
|
|
|
i |
i+1 |
|
|
|
|
i |
i+1 |
, |
(2.18) |
|
|
п |
− п |
||
|
|
пi |
− пi+1 |
, |
|
|
|
п |
− п |
. |
|
|
|
i |
i+1 |
|
|
Тут i |
- номер ітерації, |
- наперед задані допуски. |
|
||
При виконанні всіх умов (2.18) ітераційний процес завершено і переходять до пункту 6. Якщо хоча б одна з умов (2.18) не задовільняється, то повертаємось до пункту 2.
6. Після завершення ітераційного процесу проводять оцінку точності класичним для МНК способом. Спочатку обчислюють середню квадратичну помилку одиниці ваги
|
2 |
|
n
=v2 /(n − 5)
1
,
(2.19)
де поправка vi обчислюється з рівняння (2.8) або (2.5), підставляючи замість невідомих їх розв’язок з останньої ітерації. Геометричний зміст величини vi - це залишковий поперечний
паралакс після знаходження елементів взаємного орієнтування.

Середні квадратичні помилки елементів взаємного орієнтування використовуючи діагональні елементи оберненої матриці нормальних рівнянь входять в (2.16):
знаходять,
( A |
T |
A) |
−1 |
, що |
|
|
Для елементів
, , , ,
m |
л |
= |
Q11 |
, |
|
|
|
|
|
m |
л |
= |
Q22 |
, |
|
|
|
|
|
m |
п |
= |
Q33 |
, |
|
|
|
|
|
m |
п |
= |
Q44 |
, |
|
|
|
|
|
m |
п |
= |
Q55 . |
|
|
|
|
|
|
- формули аналогічні до (2.20).
(2.20)
2.1.2.Наближений спосіб
Придатний для опрацювання пари планових аерознімків (кути нахилу не перевищують
3o ).
В цьому випадку в порівнянні зі строгим способом проводять певні спрощення, які базуються на тому, що при малих кутах sin , cos 1, sin sin 2 = 0 (величина мала другого порядку в порівнянні з ). Тому рівняння (2.5) - базисна система - матиме вигляд:
x |
|
y |
|
|
|
|
|
|
|
|
x |
|
y |
|
|
|
|
|
y |
2 |
|
|
|
|
|
|
|
л |
л |
|
|
+ x |
|
|
|
− |
п |
п |
|
|
− ( f |
+ |
п |
) |
|
− x |
|
|
|
+ q = 0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
f |
|
л |
л |
л |
|
|
f |
|
п |
f |
п |
п |
п |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рівняння (2.8) для лінійно-кутової системи є таким:
|
x |
|
y |
|
|
x |
|
y |
|
|
y |
2 |
|
|
− xл − |
л |
л |
− |
п |
п |
− ( f + |
п |
) − xп п + q = 0 . |
||||||
|
|
|
|
|
||||||||||
|
|
f |
|
|
|
f |
|
f |
||||||
|
|
|
|
|
|
|
|
|
|
|||||
. (2.21)
(2.22)
Тут x л , y л , xп , yп - координати точки на лівому і правому знімках,
q
- поперечний
паралакс. Щоб спростити розв’язок, точки для вимірювання вибирають не довільно, а в т.зв. стандартних зонах стереопари (рис.1.3).
yл
yп
3 |
4 |
|
3 |
4 |
|
|
+ y |
|
|
+ y |
|
|
b |
|
−b |
|
|
1 |
2 |
хл |
1 |
2 |
хп |
|
|
||||
|
− y |
|
|
− y |
|
|
|
|
|
|
|
5 |
6 |
|
5 |
6 |
|
Рис.2.1 Стандартні зони для визначення елементів взаємного орієнтування.
Кількість точок для вимірів рівна шести, тобто маємо один надлишковий вимір, що дозволяє виконати контроль розв’язання задачі (заради об’єктивності зазначимо, що цей контроль досить слабкий). З рис.2.1 можемо записати координати точок:
точка 1: точка 2: точка 3: точка 4: точка 5: точка 6:
x |
л |
= y |
л |
|
|
xл = b , xл = 0, xл = b, xл = 0, xл = b,
= 0,
x |
п |
= −b, |
|
|
y |
л |
= 0, |
|
|
yл = yп = y , yл = yп = y , yл = yп = −y , yл = yп = −y ,
xп
xп xп xп xп
yп
= y |
п |
= |
|
|
= −b ; = 0 ; = −b ; = 0 .
= 0 ;
0 |
; |
(2.23)

Тут
b
- базис знімка,
y
- стандартна ордината зони (наприклад, 70мм). При таких значеннях
координат шести точок рівняння (2.21) можна розв’язати аналітично і отримати наступні формули для безпосереднього обчислення елементів взаємного орієнтування в базисній системі:
п
=
л = 2byf (q6 − q4
f |
|
(q3 |
+ q5 − 2q1 ) , |
||||||
2 y |
2 |
||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
п |
= |
||
|
|
|
|
|
|
|
|
||
л |
= |
f |
п − |
q2 |
, |
|
|
||
b |
b |
|
|
||||||
|
|
|
|
|
|
|
|||
) , |
|
= |
|
|
п |
1 |
( |
|
|
2 |
п |
|
|
п = 2byf (q5
f |
|
(q |
|
+ q |
|
|
|
2 |
4 |
6 |
|||
2 y |
|
|
|
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ п ) , |
|
|
|
|||
|
|
п = |
f |
|||
|
|
b |
||||
|
|
|
|
|
||
− q3 ) ,
− 2q2 ) ,
п − qb1 .
(2.24)
Для елементів взаємного орієнтування в лінійно-кутовій системі з рівнянь (2.22) отримаємо аналітичний розв’язок:
= |
f |
(q |
|
||
|
2by |
4 |
|
|
+ q5
= − |
f |
|
|
+ |
q2 |
, |
|
b |
|
|
|
b |
|||
|
|
|
|
|
|
||
− q3 − q6 ) |
, |
|
|
|
|
||
|
|
|
|
= |
1 |
(q |
|
|
|
|
|
|
|||
|
|
|
|
|
|
b |
2 |
|
|
|
|
|
|
|
|
= −
= |
|
f |
|
(q4 − q6 ) , |
|
||||||
|
|
|
|
||||||||
|
|
|
2by |
|
|
|
|
|
|||
f |
|
(q |
|
+ q |
|
+ q |
|
+ q |
|
||
|
2 |
3 |
4 |
5 |
6 |
||||||
4 y |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
q1 ) . |
|
|
|
|
|
|
|
|
|
|
|
− 2q1
−
2q |
2 |
) |
|
|
,
(2.25)
Точність визначення елементів взаємного орієнтування можна підрахувати з формул (2.26),
які отримують шляхом диференціювання виразів (2.24) або (2.25), вважаючи, що поперечні паралакси виміряні із середньою квадратичною помилкою mq :
m |
|
= m |
|
= |
f |
|
mq , |
|
|
|
|
m |
|
= |
f |
|
mq |
3 |
, |
||
л |
п |
b y |
2 |
|
|
|
|
п |
2 y |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
mq |
|
3 f |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
= m |
|
= |
1 + |
|
. |
|
|
|
|
|
|
|||
|
|
|
|
|
л |
п |
b |
4 y |
2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
або для лінійно-кутової системи:
m = |
f |
|
mq , |
|
m = |
|
f |
|
mq |
3 |
, |
|
||
b |
|
|
|
|
2 |
|
||||||||
|
|
|
y |
|
|
2 y |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
f |
|
|
|
|
|
|
|
1 |
|
|
|
3 f |
4 |
m = |
mq |
2 |
, |
|
m = |
mq |
1 + |
|
||||||
b |
|
b |
4 y |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m = |
f |
mq . |
|
|
|
|
|
|
|
|
|
|
|
|
b y |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
,
(2.26)
(2.27)
Аналіз цих формул показує, що точність визначення елементів взаємного орієнтування залежить від величини фокусної віддалі знімків - для короткофокусних аерокамер точність є кращою, аніж для довгофокусних. Чим більше перекриття між знімками, тим менший базис, і точність є гіршою.
Окрім цих геометричних параметрів на точність розв’язання задачі істотно впливає похибка виміру поперечного паралаксу. Якщо кілька десятиліть тому на виробництві опрацьовували знімки, для яких mq 0.02мм , то зараз маємо значно кращі за геометричними
та спектральними характеристиками знімки, так що mq 0.002 − 0.005мм . Це означає, що
точність визначення елементів взаємного орієнтування зросла на порядок.
Дослідження показали, що точність визначення кутів л,п , п є кращою, аніж для кутів κл, п; для лінійно-кутової системи елементи , , визначаються краще, ніж кути , .
Задача взаємного орієнтування розв’язується погано або зовсім не розв’язується, якщо сфотографована поверхня близька до поверхні циліндра, твірна якого паралельна до базису фотографування. Це так звана “умова невизначеності взаємного орієнтування”. Тоді детермінант матриці нормальних рівнянь є або нулем, або близький до нуля.
Професор І. Антіпов довів, що цього негативного явища можна позбутись, якщо до рівнянь взаємного орієнтування додається умова рівності координат зв’язкових точок.
2.2. Сумісне визначення елементів взаємного орієнтування та передавання масштабу для двох суміжних моделей
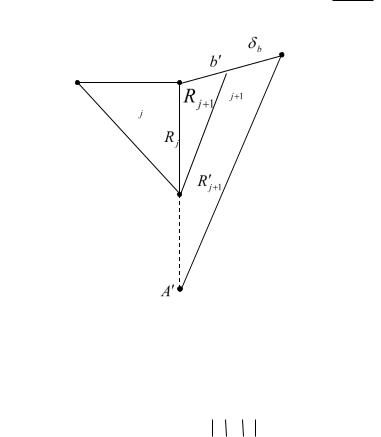
Нехай визначені елементи взаємного орієнтування j-ї моделі за формулою (2.11) та розв’язана пряма фотограмметрична засічка, тобто в j-й моделі визначено координати точки А (початок координат у точці S2). Необхідно одночасно знайти елементи взаємного орієнтування (j+1)-ї моделі та виконати приведення масштабу (j+1)-ї моделі до масштабу попередньої j-ї моделі (рис. 2.2). Як відомо, визначення елементів взаємного орієнтування виконується на підставі виміряних поперечних паралаксів, а передавання масштабу виконується за зв’язковими точками. Математичне формулювання задачі полягає у використанні рівняння (2.12) взаємного орієнтування та рівності векторів
тобто
R j
S1 S2
|
|
|
, |
|
|
|
|
|
S2 A = S2 A |
|
|
|
|
|
|||
= R |
|
= R |
K = |
R |
b − b |
= R |
− R |
b |
j+1 |
|
|
||||||
|
j+1 |
|
j+1 |
b |
j+1 |
j+1 |
b |
|
|
|
|
|
|
|
|
||
|
|
|
S3 |
|
|
|
|
|
.
(2.28)
A
Рис. 2.2. З’єднання двох моделей за зв’язковими точками
Строго кажучи, рівняння (2.28) є нелінійним відносно шуканих елементів, , , , , b і тому треба було б застосувати описаний вище прийом лінеаризації
(розклад функції у ряд Тейлора). |
|
|
|
|
|
|
||
З практичного погляду, враховуючи, що |
R Z |
та те, що розв’язання задачі відбувається |
||||||
ітеративно, перепишемо (2.28) так: |
|
|
|
|
|
|
||
|
Z |
b + Z |
|
− Z |
= v |
, |
|
(2.29) |
|
|
j |
|
|||||
|
b |
j+1 |
b |
|
|
|
||
|
|
|
|
|
|
|
||
або |
|
|
|
|
ab b + lb = vb . |
(2.30) |
||

Отже, для всіх точок (j+1)-ї стереопари складається система рівнянь (2.12), до неї долучаються рівняння (2.30), записані для зв’язкових точок, і одночасно розв’язується система нормальних рівнянь з 6 невідомими
|
|
|
|
|
|
|
X = |
|
|
|
|
b T |
(2.31) |
Уразі застосування МНК послідовність розв’язання така:
1.Для кожної зв’язкової точки розв’язують пряму фотограмметричну засічку у j-й моделі.
2.Задаються наближеними значеннями елементів взаємного орієнтування та базису в (j+1)-
й моделі
|
0 |
, |
|
0 |
, |
|
0 |
, |
|
0 |
, |
|
0 |
, |
|
|
|
|
|
b |
0 |
|
.
3.Для кожної пари виміряних точок обчислюють коефіцієнти та вільні члени (2.6).
4.Для кожної зв’язкової точки розв’язують пряму фотограмметричну засічку у (j+1)-й моделі, використовуючи спочатку наближені (а потім уточнені) параметри (елементи взаємного орієнтування та базис).
5.Для кожної зв’язкової точки складають рівняння (2.30).
6.Складають нормальні рівняння, отримують розв’язок (2.31).
7.Обчислюють уточнені значення невідомих
= |
0 |
+ |
( ) |
(i) |
, |
|||
|
|
|
||||||
= |
0 |
+ ( ) |
(i) |
, |
||||
|
|
|
||||||
= |
0 |
+ ( |
||||||
|
||||||||
|
= |
|
|
|
|
) |
(i) |
, |
|
||
0+ ( )(i) ,
=0 + ( )(i) ,
b = b |
0 |
+ ( b) |
(i) |
. |
|
|
(2.32)
8. Перевірка ітераційного процесу на перевірка
b |
(i) |
|
збіжність
− b |
(i+1) |
|
|
аналогічна до (2.10), тільки додається
b .
9. Оцінка точності розв’язання задачі аналогічна до (2.11), тільки в знаменнику стоятиме величина (n–6).
Зазначимо, що геометричну сутність рівнянь (2.28) вперше використав проф. А. Скірідов, назвавши їх “умовою бокових сторін”. Він також запропонував використати цю умову для уточнення кутового орієнтування моделі на універсальних стереоприладах.
Як вже зазначалось, проф. І. Антіпов застосував цю саму умову у побудові мережі маршрутної фототріангуляції методом залежних моделей. Таке одночасне розв’язання задачі визначення елементів взаємного орієнтування та передавання масштабу принципово змінило проблему “невизначеності елементів взаємного орієнтування”. Оскільки детермінант сукупної системи нормальних рівнянь відрізняється від нуля, то розв’язок задачі є завжди стабільним.
2.3. Задача абсолютного орієнтування моделі
У результаті розв’язання прямої фотограмметричної засічки, описаного в п. 4.1, отримують просторові координати точки А моделі об’єкта . Якщо система SXYZ є абсолютною (геодезичною), і кути нахилу знімків та базису визначені в цій системі, то зрозуміло, що модель будується в абсолютній системі координат.
Проте найчастіше система SXYZ є відносною, і тому треба знайти елементи геодезичного орієнтування моделі:
U = X 0 |
|
Y0 |
|
Z 0 |
|
|
0 |
0 |
t |
T |
. |
(2.33) |
Ф |
Ф |
0 |
|
|||||||||
|
|
|
Ф |
|
|
|
|
|
|
|
З геометричного погляду ця задача складається з трьох дій:
–перенесення початку координат з центра OФ у центр O;
–“поворот простору”;
–зміна масштабу моделі, тобто приведення його до величини t.
Формули перетворення координат є такими:

|
|
|
|
|
|
|
|
|
|
|
X |
Г |
|
|
|
|
|
X |
0 |
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
YГ |
|
= |
|
|
|
|
Y0 |
Ф |
|
|
|
+ А |
0 |
, |
|
, |
0 |
|
Y |
|
|
t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Z |
|
Г |
|
|
|
|
|
Z |
0Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Оскільки функції (2.34) є нелінійними відносно вектора (2.33), то приведемо |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
лінійного вигляду: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
a |
X |
0 |
+ b |
Y |
+ c |
x |
Z |
|
0 |
|
+ d |
x |
|
0 |
|
+ e |
|
0 |
|
+ f |
x |
|
0 |
+ g |
x |
t + l |
x |
= v |
x |
, |
||||||||||||||||||||||||||||||||||||||
|
|
|
x |
|
|
x |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
a |
X |
0 |
+ b |
Y |
+ c |
Z |
0 |
+ d |
y |
|
0 |
|
+ e |
|
0 |
|
+ f |
y |
|
0 |
+ g |
y |
t + l |
y |
= v |
y |
, |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
y |
|
|
y |
|
|
0 |
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
a |
X |
0 |
+ b |
z |
Y |
+ c |
Z |
0 |
|
+ d |
z |
|
0 |
|
+ e |
|
0 |
|
+ f |
z |
|
0 |
+ g |
z |
t + l |
z |
= v |
z |
. |
|||||||||||||||||||||||||||||||||||||||
|
|
|
z |
|
|
|
|
0 |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Тут: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
x |
|
|
=1, |
|
|
|
|
|
|
b |
|
|
= 0, |
|
|
|
|
c |
x |
= 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
y |
|
|
= 0, |
|
|
|
|
|
|
|
b |
y |
=1, |
|
|
|
|
c |
y |
= 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
z |
|
= 0, |
|
|
|
|
|
|
b |
|
|
= 0, |
|
|
|
|
c |
z |
=1, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d |
x |
|
= − Z , |
|
|
e |
x |
= − Y sin |
0 |
, |
|
|
|
|
|
|
|
f |
x |
|
= (a X − a Y )t, |
|
|
g |
x |
= X , |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
d |
|
|
= 0, |
|
e |
|
= − Ytg |
|
|
− |
|
|
|
|
1 |
|
|
Z t, |
|
|
|
|
f |
|
|
= (b X − b Y )t, |
|
|
|
|
g |
|
= Y , |
|||||||||||||||||||||||||||||||||||||
y |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
y |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
z |
|
= X , |
|
|
e |
z |
= Y cos |
0 |
, |
|
|
|
|
|
|
|
f |
z |
= (c |
|
X − c Y )t, |
|
|
|
|
g |
z |
= Z , |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
X = (a X + a |
Y + a Z )t, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
x |
|
= X |
0 |
+ X − X |
Г |
, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Y = (b |
X + b Y + b Z )t, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
y |
|
= Y |
|
|
+ Y −Y |
, |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
0 |
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Z = (c X + c Y + c |
|
Z )t, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= Z |
|
|
+ Z − Z . |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(2.34)
їх до
(2.35)
У рівняння (2.35) входять сім невідомих. Для однозначного розв’язання задачі треба мати дві планово-висотні опорні точки (вони дають шість рівнянь) та одну висотну (дає одне рівняння). Тоді задача розв’яжеться без контролю.
Найчастіше беруть чотири планово-висотні точки, розташовані по кутах стереопари, і розв’язують задачу, використовуючи МНК.
Знаходження вектора (2.33) є ітераційним і принципово не відрізняється від описаного у п.2.1.1.
Метод придатний до застосування за будь-яких значень елементів геодезичного (абсолютного) орієнтування моделі.