

Конспект лекцій 1 (Цифрова фотограмметрія)
.pdfТема 1. Цифрова фотограмметрія
Предмет та задачі. Огляд технологій.
Джерела даних в цифровій фотограмметрії. Основні фотограмметричні процеси. Продукти цифрової фотограмметрії.
Розвиток фотограмметрії як науки відбувався в кілька періодів. За класифікацією професора Гановерського університету і президента Міжнародного товариства фотограмметрії і дистанційного зондування (ISPRS) в 1984–1988 рр. Г. Конечни (Gottfried Konecny), ці періоди визначаються таким чином:
—мензульна фотограмметрія (1850–1900), інша назва «Метод Лосседа», по імені французського військового топографа Еме Лосседа (Aime Laussedat, 1819–1907), який першим застосував фотокамеру для створення топографічних планів місцевості;
—аналогова фотограмметрія (1900–1960), яка характеризується початком використання стереоскопії при фотозніманні з літальних апаратів;
—аналітична фотограмметрія, яка почалась в 1960р. з впровадженням ЕОМ і широкого практичного використання аналітичних методів; В 1957р. канадський фотограмметрист Ю.В.Хелава (U.V.Helava) на 1-му Міжнародному фотограмметричному з’їзді висунув ідею створення аналітичного фотограмметричного приладу. Через 3 роки, в 1960р. такий прилад був створений фірмами OMI (Італія) і Bendix (США) під назвою АР-1 (analytical plotter). Прилад складався із стереокомпаратора, комп’ютера і координатографа (графопобудовувача). Програмне забезпечення створив Ю.В.Хелава.
—цифрова фотограмметрія (з 1980р. до нашого часу).
Рис.1. Періоди розвитку фотограмметрії
Розвиток сучасних засобів обчислювальної техніки, засобів отримання цифрових зображень та систем позиціонування забезпечили фундамент для створення технології цифрової фотограмметрії, яка має на меті будувати просторові моделі об’єктів за їхніми різноракурсними зображеннями (знімками). В наш час фотограмметричні методи широко використовуються для побудови цифрових моделей місцевості і об’єктів за аерокосмічними і наземними знімками. Такими об’єктами можуть бути як місцевість (ландшафт) так і окремі архітектурні споруди, промислові установки, транспортні засоби, внутрішні органи людей і тварин, мікро-об’єкти тощо.

Цифрова фотограмметрія почала розвиватись з появою в 1970 році засобів отримання цифрових зображень. На початку 90-х років минулого століття з’явились перші комерційні цифрові фотограмметричні системи (ЦФС), дозволяючі автоматизовано виконувати всі фотограмметричні процеси на комп’ютері, починаючи від вимірювання знімків на екрані монітора і закінчуючи формуванням цифрової геометричної моделі зображеного на знімках об’єкта.
Цифрова фотограмметрія реалізовує способи опрацювання цифрових зображень, які грунтуються на аналітичних методах обробки знімків, досягненнях теорії комп’ютерної графіки, методів розпізнавання образів, обчислювальної геометрії і теорії інформації, теорії ймовірності, математичної статистики тощо.
Рис.2. Чинники, що впливають на розвиток і стан цифрової фотограмметрії та сфери її застосування
Отримання цифрового зображення пов’язане з двома процесами, які виконуються одночасно: дискретизація зображення і квантування рівнів яскравості елементів зображення.
Дискретизація – це процес переходу від неперервного аналогового вхідного зображення до функції, заданої дискретно у вузлах сітки з кроком Δx, Δy. Тобто дискретизація – це процес поділу всього зображення на окремі дрібні ділянки – пікселі. Дискретизацію графічно можна представити таким чином:
Рис.3. Принцип дискретизації простору при формуванні цифрового знімка
Математично результат дискретизації зображення можна показати в такому виді:

f (x) ={f (x1), f (x2),..., f (xn)} .
На практиці при фотограмметричному опрацюванні зображень використовується розмір пікселів від 8 до 14 мкм.
Квантування рівня яскравості елементів зображення – це заміна неперервного розподілу яскравості дискретними значеннями. При квантуванні за рівнем яскравості динамічний діапазон зображення ділиться на 256 рівнів (від 0 до 255).
Система, формуюча цифрове зображення, повинна забезпечувати достатні розмір пікселя і точність положення пікселів відносно один одного (необхідну точність позиціонування 1-2 мкм).
Растрова форма цифрового зображення представляє його як плоску матрицю (рис. 4), яка складається з одинакових адресованих комірок малого розміру — пікселів, кожен з яких характеризується певним набором параметрів: положенням (адресування), кольором, щільністю, яскравістю (інтенсивністю) і т.д.
 Рис.4. Матрична форма растру
Рис.4. Матрична форма растру
Доступ до елементів растрового зображення (пікселів) здійснюється за номерами рядків і стовпців. Початок координат Ор файлової прямокутної системи співпадає з центром першого елемента лівого верхнього кута зображення, вісь абсцис ХР — з першого рядка, вісь ординат УР— з першого стовпця (див. рис. 4).
Растрові зображення отримують безпосередньо в процесі знімання місцевості з допомогою цифрових камер або шляхом сканування фотограмметричним сканером аеронегативів або фотознімків.
Растрове зображення характеризується його геометричним і радіометричним розрізненням.
Геометричне розрізнення цифрового зображення визначається лінійним розміром піксела і представляється в метрах, якщо розмір відтоситься до місцевості, або в мікрометрах, якщо мова йде про знімок) або кількістю точок на дюйм (dpi). Звичайний розмір піксела — 5...9 мкм (1 мкм = 0,001 мм). Величина геометричного розрізнення визначає якість зображення, точність фотограмметричної обробки, можливості збільшення зображення тощо.
Вибір необхідного геометричного розрізнення слід виконувати, виходячи з таких передумов:
•необхідна точність визначення планових координат точок фотограмметричних мереж:
PXY=0.5Vs M / m = 0.5 Vs / Kt (1)
• необхідна точність визначення висот точок фотограмметричних мереж:
PZ=0.5 fVZ /(b m ) ; (2)
• при скануванні (оцифровуванні) - збереження розрізнення вхідного знімка:
PR=0.4 / R ; (3)
• забезпечення геометричної точності (розрізнення) створюваних в ході обробки графічних планів чи ортофотопланів:
PP=70 M / m = 70/Kt (4)
де M, m – знаменники масштабів створюваного плану і аерознімка; VS , VZ – потрібна
-1
точність визначення планових координат і висот точок (м); R – розрізнення знімка (мм );
f, b – фокусна відстань знімальної камери і базис фотографування в масштабі знімка (мм).
-1
Наприклад, при M = 2000, m = 10000, f = 100мм, b = 70 мм, R = 40 мм , перетині рельєфу h = 1,0м отримаємо:
PXY = 0,5×0,2/5 = 0,02 мм = 20 мкм;
PZ = 0,5×100×0,2 × 1000/(70×10000)=0,014 мм =14 мкм;
PR = 0,4/40=0,01 мм = 10 мкм;
PP =70/5=0,014 мм = 14 мкм.
Якщо цифрові знімки використовуються для фотограмметричного згущення та виготовлення ортофотопланів, то планують розрізнення знімків в 10 мкм, що відповідає
25600/10 = 2600 dpi.
Радіометрична характеристика встановлює кількість рівнів квантування яскравості зображення і фотометричний вміст елемента зображення (одноколірне, напівтонове, кольорове, спектрозональне) і позначається кількістю біт на піксел. Для позначення щільності (рівень потемніння) елемента зображення весь діапазон напівтонів від білого до чорного ділиться на певну кількість частин, які називаються рівнями квантування. Для отримання бінарного (чорно-білого) зображення використовують тільки два рівні квантування, в яких представлені тільки білий і чорний кольори. В напівтонових зображеннях як правило використовують 256 рівнів квантування, для представлення яких для кожного пікселя зображення резервується 8 біт (1 байт). Чорному кольору завжди відповідає рівень 0, білому — рівень 1 бінарного зображення і рівень 255 — напівтонового.
Кольорове зображення формується з використанням тієї чи іншої палітри (RGB, CMYK і т.д.), в яких кольори і відтінки створюються шляхом змішування основних кольорів в пропорціях, відповідних ровням їхнього квантування. Палітра RGB – найпоширеніша, передбачає використання трьох основних кольорів: червоного (Red), зеленого (Green) і синього (Blue). Так, поєднання червоного кольору з зеленим одинакової інтенсивності дає жовтий колір; зеленого з синім – голубий; синього з червоним – оранжевий, а всіх трьох кольорів – білий.

Палітра CMYK забезпечує більш якісну передачу відтінків при змішуванні чотирьох кольорів: голубого (Cyan), бузкового (Magenta), жовтого (Yellow) і чорного
(Black).
Для представлення одного пікселя кольорового зображення з 256 рівнями квантування по кожному каналу необхідно 24 біти (3 байти) при використанні палітри RGB або 32 біти (4 байти) при використанні палітри CMYK.
Джерела даних в цифровій фотограмметрії.
В цифровій фотограмметрії мають справу з цифровими зображеннями, отримуваними цифровими кадровими камерами, сканерними, лазерними знімальними системами або шляхом перетворення аналогового зображення в цифрову форму.
Основним джерелом даних для цифрової фотограмметрії є аерознімання з різних носіїв з допомогою різного роду цифрових знімальних систем і допоміжного обладнання (рис.5).
Рис.5. Різні моделі аерознімання і точність отримуваних цифрових моделей місцевості
В наш час вже створено високоточні цифрові топографічні аерокосмічні знімальні системи. Зокрема, поширення набули цифрові знімальні системи DMC фірми Carl Zeiss/Intergraph (Z/I Imaging), авіаційні цифрові знімальні системи серій ADS, RCD фірми LH Systems (Швейцарія) та німецького аерокосмічного центру DLR, камери Rollei (Австрія), українська 3DAS та багато інших.

Рис.6. Комплект апаратури Z/I Imaging Sensor Systems
Кадрові камери будують на основі однієї матриці (мало- і середньоформатні камери), або на основі кілької матриць ПЗЗ. Другий підхід пояснюється тим, що технологічно складно виробляти цифрові світлочутливі матриці великого розміру, і відповідно доводиться використовувати спеціальні прийоми об’єднання кадрів, отриманих в один момент часу з різних матриць. Так побудовані камери Ultracam D, Ultracam X фірми Microsoft-Vexel і DMC фірми Z/I.
Рис.7. Отримання «віртуального» знімка в камерах DMC і Ultracam
Інший підхід для отримання цифрових зображень є використання світлочутливої лінійки, яка переміщується разом з носієм і формує цифрове покриття. Такий підхід використовують камери ADS фірми Leica Geosystems. Геометрія таких знімків є дуже складна і передбачає виконання цілого ряду трансформувань і перетворень.
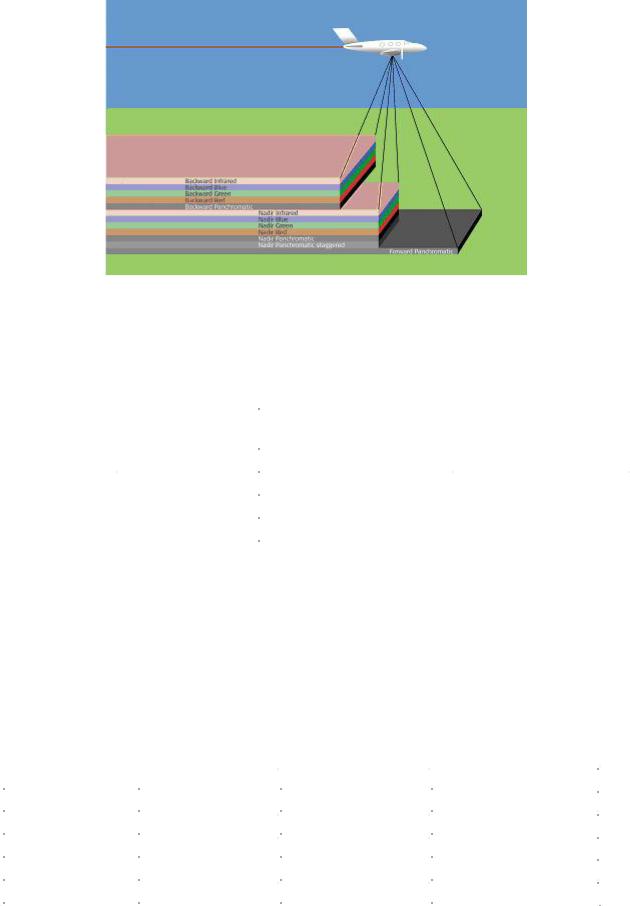
Рис.8. Схема отримання зображень в знімальних системах типуADS
Класичний термін "масштаб знімання" стосовно знімків, отриманих цифровими камерами приводить до введення поняття "розмір пікселя на місцевості" (GSD - ground sample distance).
В наступній таблиці приведено основні характеристики деяких камер.
|
|
|
|
|
|
|
|
Камера |
|
Розмір кадра (пікс) |
|
Фізичний розмір пікселя |
|
Фокусна відстань F мм |
|
|
|
(мкм) |
|
(пікс) |
|||
|
|
|
|
|
|||
|
|
|
|
|
|||
ADS 40/ ADS 80 |
|
12000 x ∞ |
|
6.5 |
|
62.5 (9600) |
|
|
|
|
|
|
|
||
DMC |
|
13500 x 8000 |
|
12 |
|
120 |
(10000) |
|
|
|
|
|
|||
DSS |
|
7200 x 5400 |
|
6.8 |
|
60 (8800) |
|
|
|
|
|
|
|
||
Ultracam X |
|
14400 x 9400 |
|
7.2 |
|
100 |
(13900) |
|
|
|
|
|
|
|
|
RC-30 |
|
-(15000 x 15000 при |
|
- |
|
150 |
(10000 при скануванні |
|
скануванні 15 мкм) |
|
|
15 мкм) |
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Величина GSD, яка зрештою визначає точність результатів подальшої аналітичної обробоки, при зніманні з висоти H розраховується за простою формулою
GSD = H/F,
де висота H вимірюється в см, а фокусна відстань F в пікселях. Для порівняння різних камер приведемо таблицю зі значеннями GSD і розмірами кадра на землі при зніманні з різних висот.
|
|
|
|
|
|
|
|
|
Камера/H+розмір |
|
500 м |
|
1000 м |
|
2000 м |
||
|
|
|
|
|
|
|
||
ADS 40/ ADS 80 |
|
5.2 |
см (624 x ∞) м |
|
10.4 см (1250 x ∞)м |
|
20.8 |
см (2500 x ∞)м |
|
|
|
|
|
|
|
||
DMC |
|
5 см (675 x 400) м |
|
10 см (1350 x 800)м |
|
20 см 2700 м x 1600)м |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
DSS |
|
5.7 |
см (410 x 308) м |
|
11.4 см (820 x 616)м |
|
20.8 |
см 1640 м x 1232)м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Ultracam X |
|
3.6 |
см (518 x 338) м |
|
7.2 см (1036 x 676)м |
|
14.4 |
см 2072 м x 1352)м |
|
|
|
|
|
|
|
||
RC-30/150/15мкм |
|
5 см (750 x 750) м |
|
10 см (1500 x 1500)м |
|
20 см (3000 x 3000)м |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Величина GSD визначає точність координат в плані, а для отримання точності координат по висоті слід розділити величину GSD на B/H - відношення базиса знімання до висоти знімання. При 60% перекритті величина B/H для різних камер приведена в таблиці:
|
|
|
Камера |
|
B/H |
|
|
|
ADS 40/ ADS 80 |
|
0.29/0.49/0.78 |
|
|
|
DMC |
|
0.32 |
|
|
|
DSS |
|
0.25 |
|
|
|
Ultracam X |
|
0.27 |
|
|
|
RC-30 F=150/300 (аналогова) |
|
0.61/0.31 |
|
|
|
Відношення B/H для камер ADS 40/80 визначається вибором однієї з 3х можливих комбінацій стереопар (назад-надир, надир-вперед, назад-вперед). Точність вимірювання координат точок по висоті буде визначатись формулою
dZ = c*GSD/(B/H),
де c - параметр, описуючий "якість" знімка, який для більшості цифрових камер складає
0.1.
Значення параметра FPS (кількість кадрів в секунду) для камери обмежує мінімальну висоту знімання (а отже, і мінімальне значення GSD). Носій (літак), на якому встановлена камера, не може летіти надто повільно. При 60% перекритті сусідніх знімків в маршруті, висоті польоту H і заданому FPS швидкість носія V визначається за формулою:
V = H* FPS*0.4* (S/F) = 0.4*FPS*S*GSD.
де S - розмір кадра в пікселях вздовж польоту (як правило, коротка сторона кадра). Наприклад, якщо носій не може летіти повільніше 75 км/год, камера DMC не зможе
отриати розрізнення краще, чим 4 см. Таке обмеження може бути істотним для знімань мало- і средньоформатними камерами на низьких висотах (50-100м) з БПЛА.
Більшість сучасних цифрових камер дозволяють отримувати знімки з глибиною кольору не менше 8 біт на канал, що дозволяє проглядати деталі в тінях. Деякі камери дозволяють отримувати знімки і в інфрачервоних (ближньому і дальньому) діапазонах. В цифрових камерах малого і середнього форматів кольорове зображення отримують відразу при експозиції з допомогою так званої байєрівської матриці (рис.9). Світлочутлива матриця містить по 25% червоних і синіх елементів і 50% зелених елементів, рпевним чином розташованих в площині ПЗЗЗ.
Рис.9. Байєрівська матриця
Камери ADS-40 і ADS-80 використовують інший підхід. За спеціальним об’єктивом розташовані ПЗЗ-лінійки одинакового розрізнення (12000 пікселів), чутливі в різних діапазонах (R, G, B, IR, GrayScale).
В більшості випадків цифрові камери працюють паралельно з GPS або GPS/IMU приймачами (для камер ADS-40/ADS-80 використання GPS/IMU обов’язкове) для фіксації в польоті елементів зовнішнього орієнтування знімків. Вживають диференціальний режим GPS-вимірювань з задіюванням базових станцій, розташованих неподалік (30-50 км) від місця проведення знімання. Останнім часом все більш точними стають методи обробки GPS даних на основі ефемерид супутників, доступних через кілька днів після знімання. Ці методи мають назву PPP (англ. Precise Point Positioning). Точність визначення координат GPS при використанні PPP наближається до точності диференціальних методів – 4-7 см.
Отримувані в польоті для кожного знімка елементи зовнішнього орієнтування в процесі обробки даних на ЦФС урівнюються або використовуються як пряме геопозиціонування.
Наближеною оцінкою необхідної для прямого геопозиціонування точності IMU є кутовий розмір пікселя β= 1/F, де F – фокусна відстань камери в пікселях. Для більшості IMU систем ця величина приблизно дорівнює 0.006 градуса (прилади компанії Applanix POS AVI 410 та 510 серій).
Востанні десятиліття створено знімальне обладнання, використовуюче нові фізичні принципи. Це в першу чергу стосується до створення лазерних знімальних систем. Ддля позначення приладів цього типу, одночасно використовуються терміни лазерний локатор (laser locator), лазерний сканер (laser scanner), лідар (LIDAR – Light Detection and Ranging) і лазерна скануюча система (laser scanning system).
Авіаційна лазерна знімальна система - це комплекс приладів, який включає лазерний 3D-сканер, бортову GPS-антену, інерціальну систему, часто цифрову аерознімальну камеру та інше допоміжне обладнання. Вся апаратура жорстко закріплена на літальному апараті. Лазерний сканер - це активний засіб дистанційного зондування, який з допомогою віддалі і кута відхилення лазерного променя від вертикального положення фіксувати відбиття цього променя від об’єктів місцевості (часто множинні) дозволяє отримувати хмару тримірних точок. GPS-антена фіксує просторове положення центра випромінення, інерціальна система - кутове положення кожного скануючого променя в просторі, а аерознімальна камера – отримувати зображення місцевості.
Вбільшості промислових комплексів для отримання хмари просторових точок використовується принцип оптико-механічного сканування: з допомогою обертового дзеркала (призми, оптичного клину чи іншого пристрою) і руху носія. Джерелом випромінення є напівпровідниковий лазер ближнього інфрачервоного діапазону. Лазер працює в імпульсному режимі.
Якщо на своєму шляху промінь стикається з неповною перешкодою, то частина енергії імпульсу відбивається, а інша частина проходить далі вздовж лінії візування; причиною першого відбиття можуть бути листяний покрив, проводи і опори ЛЕП і т. д., а останнє відбиття як правило відповідає землі або іншій суцільній поверхні, яка є абсолютною перешкодою на шляху лазерного імпульсу (це може бути дах будівлі і т.д.). Таким чином, в кожному сеансі вимірювання можуть реєструватись відбиття більш ніж від одного об'єкту якщо об’єкт має нещільну структуру. Як правило реєструється до 5-ти відбиттів (рис. 10).

Рис. 10. Реєстрація декількох відбитих імпульсів в одному акті сканування
Висока частота імпульсів гарантує отримання щільних хмар тривимірних точок (при частоті 1 кГц виконується 100тис вимірювано в сек.), що складає до 15 точок на м2 і є достатнім для геометричного моделювання в топографічних та інженерно-вишукувальних застосуваннях (рис. ). Проте, смуга сканування обмежується максимальним кутом сканування (50-60 градусів). Точність визначення кутового положення лазерного променя як правило складає 0,005 - 0,008 градуса, точність визначення висоти точки 15 см при висоті знімання до 1200 м і 35 см - при висоті до 3000 м, точність планового положення 1/2000 від висоти (в метрах).