

Визначення параметрів трансформації двовимірних координат пунктів. Лабораторна робота
.pdfМIНIСТЕРСТВО ОСВIТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ УНIВЕРСИТЕТ "ЛЬВIВСЬКА ПОЛIТЕХНIКА"
ВИЗНАЧЕННЯ ПАРАМЕТРІВ ТРАНСФОРМАЦІЇ ДВОВИМІРНИХ КООРДИНАТ ПУНКТІВ
МЕТОДИЧНI ВКАЗIВКИ
до лабораторної роботи з курсу “Космічна геодезія” для студентів спеціальності 7.070901 “Геодезія”
Затверджено на засіданні кафедри вищої геодезії та астрономії
Протокол № 1-2008/09 від 28.08.2008 р.
Львів 2009
Методичні вказівки до лабораторної роботи на тему “Визначення параметрів трансформації двовимірних координат пунктів” для студентів спеціальності 7.070901 “Геодезія” /Уклад.: Марченко О.М., Цюпак I.М. - Львів: Нац. університет “Львівська політехніка”, 2009.- 16 с.
Укладачі: О.М. Марченко, докт.фіз.-матем.наук, проф. I.М. Цюпак, канд.техн.наук, доц.
Відповідальний за випуск Ф.Д. Заблоцький, докт.техн.наук, проф.
Рецензенти: П.Д. Двуліт, докт.техн.наук, проф.
А.Л. Церклевич, канд.фіз.-матем.наук., доц.
2
Мета роботи: освоєння студентами алгоритму визначення параметрів трансформації двовимірних координат пунктів та їх переобчислення з однієї системи плоских координат в іншу.
Лабораторна робота виконується індивідуально за вихідними даними свого варіанту завдання, виданого викладачем. До роботи треба зробити рисунок, записати робочі формули, обчислення подати у таблицях.
1. Постановка задачі
Для створення геодезичної основи топографічних та кадастрових знімань тепер застосовують супутникову технологію – GPS. За GPS-спостереженнями координати пунктів визначаються у геоцентричній системі координат [1]. Але топографічні і кадастрові плани виконуються у державній системі координат, яка негеоцентрична, її можна назвати локальною. Трансформацію координат пунктів з геоцентричної системи координат (WGS-84 або ITRF) у локальну – (СК-42 чи СК-63) можна виконувати у просторових координатах [1, 3] або на площині [1, 4, 5] у певній проекції кожного з еліпсоїдів (WGS-84 і Красовського).
Для перетворення просторових координат точки з геоцентричної системи у локальну необхідно 7 параметрів трансформації: c1, c2, c3 – лінійний зсув центрів систем координат, - масштабний множник і 1, 2, 3 – кути обертань кожної осі (X, Y, Z) однієї системи відносно відповідної осі іншої системи координат.
У системі плоских (двовимірних) координат x, y для переобчислення координат точки з однієї координатної системи в іншу необхідно знати тільки 4 параметри трансформації.
Якщо ж параметри трансформації невідомі, тоді їх необхідно визначати. Для цього вихідними даними є координати щонайменше 3-ох пунктів, які відомі в обох системах координат.
2. Алгоритм трансформації двовимірних (плоских) координат
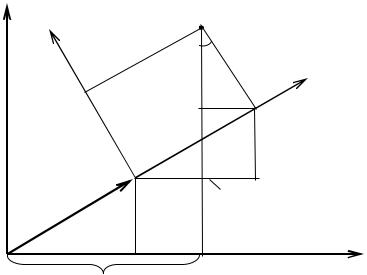
Два різні набори планових координат містяться у векторах X та XT (рис. 1). Перетворення двовимірних координат подібності означається формулою
XT C R X , |
(1) |
яка містить масштабний множник , вектор зсуву центрів систем координат
c1 |
|
, |
(2) |
C |
|
||
c2 |
|
|
|
3
а також матрицю з кутом повороту
cos |
sin |
|
R |
. |
(3) |
sin |
cos |
|
У формулі (1) позначено через Х – вектор координат пункту в плоскій системі координат, як проекції еліпсоїда Красовського, а через ХT - вектор координат цього ж пункту в плоскій системі координат, як проекції еліпсоїда WGS - 84.
xT
x
y |
x |
|
|
y |
|
|
|
 x sin
x sin

y cos
c c1
c2 |
yT |
|
yT
Рис. 1. Перетворення подібності двовимірних координат
Підстановка рівнянь (2) та (3) у співвідношення (1) дає координати пунктів після перетворення:
xT c1 |
x cos y sin |
(4) |
|
. |
|
yT c2 |
x sin y cos |
|
Ці формули можна перевірити з геометричної побудови на рис. 1, де показані складові члени для координат xT i yT (без масштабного множника).
Якщо параметри перетворення C, , R відомі, то за допомогою рівняння
(4) координати в системі Х можна перевести у систему XT. Якщо ж параметри перетворення невідомі, то їх можна визначити, використовуючи спільні точки.
3. Алгоритм визначення параметрів трансформації плоских координат
Для розв’язання цієї задачі відносно чотирьох невідомих параметрів достатньо мати дві спільні точки, кожна з яких дає два рівняння. На практиці
4
використовується надлишкова кількість спільних точок, а невідомі параметри обчислюються за допомогою врівноваження методом найменших квадратів. Зауважимо, що саме трьома точками фіксується положення площини у просторі. Тому приймемо, що мінімальна кількість пунктів з відомими координатами в обох системах координат, які необхідні для визначення параметрів трансформації, дорівнює 3-ом.
3.1. Рівняння похибок
Враховуючи, що параметричні рівняння для визначення параметрів трансформації, отримані з рівнянь (4), – є нелінійними, тому для їх розв’язання необхідно утворити інші параметри, які матимуть лінійну залежність. Такими параметрами будуть: с1, с2, pc і ps. Тут два останні параметри позначені як:
|
|
pc cos , |
(5) |
|
|
ps sin . |
|
|
|
|
|
З врахуванням формул (5) рівняння похибок запишемо так: |
|||
|
ax1 c1 ax2 c2 ax3 pc ax4 ps |
lx vx , |
|
|
|
|
(6) |
|
a y1 c1 a y2 c2 a y3 pc a y4 ps l y v y, |
||
де с1, с2, |
рс, |
і рs – поправки до початкових |
значень параметрів |
трансформації, |
axi i |
ayi (i = 1, 2,…, k) – коефіцієнти при невідомих параметрах |
|
відповідно для координат x i y, k – кількість параметрів трансформації, lx i ly
– вільні члени лінійних параметричних рівнянь похибок, vx i vy – похибки. Рівняння (6) необхідно скласти для кожного пункту, який використовується для визначення параметрів трансформації. Коефіцієнти при невідомих отримають наступні значення:
ax1 1; |
ax2 0 ; |
ax3 x ; |
ax4 |
y , |
(7) |
a y1 0; |
a y2 1; |
a y3 y ; |
a y4 |
x . |
(8) |
Вільні члени рівнянь обчислимо за формулами |
|
|
|
||
|
lx xT x, |
|
|
(9) |
|
|
l y yT y. |
|
|
||
|
|
|
|
||
3.2. Нормальні рівняння |
|
|
|
||
Якщо маємо 3 пункти, то рівнянь похибок буде: |
2 3 = 6. |
Оскільки їх |
|||
більше, ніж шуканих параметрів, то систему рівнянь виду (6) розв’яжемо методом найменших квадратів, для цього необхідно перейти до системи нормальних рівнянь, які приймуть наступний вид:
5
a j1a j1 c1 a j1a j2 c2 a j1a j3 pc a j1a j4 ps a j1l j 0 |
|
||||||||
a j1a j2 |
c1 |
a j2a j2 |
c2 |
a j2a j3 |
pc a j2a j4 |
ps a j2l j 0 |
|
||
a j1a j3 |
c1 |
a j 2a j3 |
c2 |
|
a j3a j3 pc a j3a j4 ps a j3l j 0 , |
(10) |
|||
a j1a j4 |
c1 |
a j2a j4 |
c2 |
a j3a j4 |
pc a j4a j4 |
ps a j4l j 0 |
|
||
де коефіцієнти і вільні нормальних рівнянь обчислюються за формулами |
|
||||||||
|
6 |
|
|
|
6 |
|
6 |
|
|
a j1a j1 a j1 a j1 ; |
a j1a j2 a j1 a j2 ; |
a j1a j3 a j1 a j3 , |
|
||||||
|
j 1 |
|
|
|
j 1 |
|
j 1 |
|
|
|
6 |
|
|
|
|
6 |
|
6 |
|
a j1a j4 a j1 a j4 ; |
a j2a j2 a j2 a j2 ; |
a j2a j3 a j2 a j3 , |
|||||||
|
j 1 |
|
|
|
j 1 |
|
j 1 |
|
|
|
6 |
|
|
|
6 |
|
|
6 |
|
a j2a j4 a j2 a j4 ; |
a j3a j3 a j3 a j3 ; |
a j3a j4 a j3 a j4 , |
(11) |
||||||
|
j 1 |
|
|
|
j 1 |
|
j 1 |
|
|
|
6 |
|
|
|
6 |
|
6 |
|
|
a j4a j4 a j4 a j4 ; |
a j1l j a j1 l j ; |
a j2l j a j2 l j , |
|
||||||
|
j 1 |
|
|
|
j 1 |
|
j 1 |
|
|
|
|
|
6 |
|
|
|
6 |
|
|
|
|
a j3l j a j3 l j ; |
a j4l j a j4 l j . |
|
|||||
|
|
|
j 1 |
|
|
|
j 1 |
|
|
Систему нормальних рівнянь (10), як систему лінійних рівнянь, можна розв’язати різними способами, наприклад, способом Гаусса, або способом визначників, або способом оберненої матриці.
Розв’язування системи нормальних рівнянь способом Гаусса. Цей спосіб розв’язання складається з двох частин. У першій – виконується послідовне виключення невідомих по-одному з кожного рівняння – це «прямий хід». Коли залишається одне рівняння з одним невідомим – воно легко розв’язується. Тепер починається друга частина – «обернений хід», коли знаходяться невідомі – корені системи рівнянь, послідовною підстановкою знайдених невідомих у попередні рівняння. У такий спосіб визначають усі корені системи рівнянь.
Формули для обчислення поправок до початкових значень невідомих
параметрів трансформації ( с1, с2, pc і ps) наступні: |
|
|
||
a j1a ji |
|
|
|
|
a jia ji 1 a jia ji a j1a j1 |
a j1a ji ; |
i, j 2,3,4 , |
(12) |
|
a j1a ji |
|
|
|
|
a jil j 1 a jil j a j1a j1 |
a jil j ; |
i, j 2,3,4 , |
(13) |
|
6

|
|
|
|
a j2a ji |
|
|
|
|
|
|
|
a jia ji 2 a jia ji 1 a j2a j2 |
a j2a ji ; |
i, j 3,4 , |
(14) |
||||||
|
|
|
|
a j2a ji |
|
|
|
|
||
|
|
a jil j 2 a jil j 1 a j2a j2 |
a jil j ; |
i, j 3,4 , |
(15) |
|||||
|
|
|
|
a j3a ji |
|
|
|
|||
|
a jia ji 3 a jia ji 2 a j3a j3 |
a j3a ji ; |
i, j 4 , |
(16) |
||||||
|
|
|
|
a j3a ji |
|
|
|
|||
|
|
a jil j 3 a jil j 2 a j3a j3 |
a jil j ; |
i, j 4 , |
(17) |
|||||
|
|
|
|
a j4l j |
|
3 |
|
|
||
|
|
|
ps a j4a ji |
3 ; |
|
(18) |
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
pc |
a j3a ji 2 a j3l j 2 a jia j4 2 ps , |
(19) |
||||||
|
|
1 |
|
|
|
|
|
|
|
|
c2 |
|
a j2a ji 1 a j2l j 1 a jia j3 |
1 pc a jia j4 1 ps , |
(20) |
||||||
c1 a j11a ji a j1l j a jia j2 c2 a jia j3 pc |
a jia j4 ps . |
(21) |
||||||||
За допомогою калькулятора обчислення за формулами (12) – (21) виконують у спеціальній таблиці (табл. 1), котра має назву: «Схема Гаусса-Дулітля».
Розв’язування системи нормальних рівнянь способом визначників.
Для зручності запису алгоритму цього способу перепишемо систему рівнянь похибок (6) у матричному вигляді [2]
A p L V , |
(22) |
де А – матриця коефіцієнтів рівнянь похибок, p – вектор параметрів трансформації, L – вектор вільних членів параметричного рівняння, V – вектор похибок. У випадку 3-ох пунктів матриця А має вигляд:
1 |
0 |
x1 |
y1 |
|
|
|
0 |
1 |
y |
x |
|
|
|
|
|
1 |
1 |
|
|
|
1 |
0 |
x2 |
y2 |
|
, |
(23) |
A |
|
|
|
|
||
0 |
1 |
y2 |
x2 |
|
|
|
1 |
0 |
x3 |
y3 |
|
|
|
|
|
|
|
|
|
|
0 |
1 |
y3 |
x3 |
|
|
|
7

Таблиця 1
Схема Гаусса-Дулітля
|
a] |
|
b] |
|
|
с] |
|
|
|
|
d] |
|
|
|
|
|
l] |
|
|
|
|
S] |
Контроль |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
[aa] |
|
[ab] |
|
|
[ac] |
|
|
[ad] |
|
|
|
[al] |
|
|
[aS] |
a]+b]+ +l] |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ab |
|
|
ac |
|
|
|
|
ad |
|
|
|
|
|
al |
|
|
|
|
ab |
|
|||||||||||||||
E1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
aa |
|
|
aa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
aa |
|
|
|
|
|
|
aa |
|
|
aS |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
II |
|
|
[bb] |
|
|
[bc] |
|
|
[bd] |
|
|
|
[bl] |
|
|
[bS] |
b]+c]+ +l] |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I E1 |
|
|
ab ab |
|
ac ab |
|
ad ab |
|
|
al ab |
|
aS ab |
|
|||||||||||||||||||||||||
|
aa |
|
aa |
|
|
|
aa |
|
|
|
|
aa |
|
|
|
aa |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
[bb.1] |
|
|
[bc.1] |
|
|
[bd.1] |
|
|
|
[bl.1] |
|
|
[bS.1] |
|
|||||||||||||||||||||
II |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
bc.1 |
|
|
|
bd.1 |
|
|
|
|
bl.1 |
|
|
|
bS.1 |
|
|||||||||||||||||
E2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bb.1 |
|
|
bb.1 |
|
|
bb.1 |
|
|
bb.1 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
III |
|
|
|
|
|
|
[cc] |
|
|
[cd] |
|
|
|
|
[cl] |
|
|
[cS] |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
ac ac |
|
|
ad ac |
|
|
|
al ac |
|
|
aS ac |
|
||||||||||||||||||||
I E1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
aa |
|
|
|
aa |
|
|
|
|
aa |
|
|
|
aa |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
II E2 |
|
|
|
|
|
bc.1 bc.1 |
|
|
bd.1 bc.1 |
|
|
bl.1 bc.1 |
|
|
bS.1 bc.1 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
bb.1 |
|
|
|
bb.1 |
|
|
|
bb.1 |
|
|
|
bb.1 |
|
||||||||||||||||||
III |
|
|
|
|
|
|
[cc.2] |
|
|
[cd.2] |
|
|
|
[cl.2] |
|
|
[cS.2] |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8
продовження табл. 1
|
a] |
|
b] |
|
с] |
|
|
|
|
|
|
d] |
|
|
|
|
|
|
|
|
|
|
l] |
|
|
|
|
S] |
Контроль |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
E3 |
|
|
|
|
|
|
|
|
|
|
cd.2 |
|
|
|
|
cl.2 |
|
|
|
cS.2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
cc.2 |
|
|
|
|
|
cc.2 |
|
|
|
|
cc.2 |
|
|||||||||||||||
IV |
|
|
|
|
|
|
|
|
|
|
|
[dd] |
|
|
|
|
|
|
|
[dl] |
|
|
|
|
[dS] |
|
|||||||||||||
I E1 |
|
|
|
|
|
|
|
ad ad |
|
|
|
al ad |
|
|
|
|
aS ad |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
aa |
|
|
aa |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aa |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
bd.1 bd.1 |
|
|
bl.1 bd.1 |
|
|
|
bS.1 bd.1 |
|
|
||||||||||||||||||||||
II E2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
bb.1 |
|
|
|
|
|
bb.1 |
|
|
|
|
bb.1 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
cd.2 cd.2 |
|
|
cl.2 cd.2 |
|
|
cS.2 cd.2 |
|
|
|
||||||||||||||||||||||
III E3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cc.2 |
|
|
|
|
cc.2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
cc.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
IV |
|
|
|
|
|
|
|
|
|
|
|
[dd.3] |
|
|
|
[dl.3] |
|
|
|
[dS.3] |
|
||||||||||||||||||
E4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dl.3 |
|
|
|
|
dS.3 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dd.3 |
|
|
dd.3 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dl.3 |
|
|
|
|
|
|
|
|
|
|
|||||
pS |
|
|
|
|
|
|
ps |
|
dl.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
dd.3 |
|
|
dd.3 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
cd.2 |
ps |
|
|
|
|
cl.2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||
pC |
|
|
|
pc d ] l] |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
cc.2 |
|
|
|
cc.2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
c2 |
|
c2 c] d ] l] |
|
bc.1 |
pc |
|
bd.1 |
ps |
|
|
|
|
bl.1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
bb.1 |
bb.1 |
|
|
|
bb.1 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c1 |
b] c] d ] l] |
|
ab c2 |
ac pc |
|
ad |
|
ps |
|
|
|
|
al |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
aa |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
aa |
|
aa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aa |
|
|
|
|
|
|
|
|
|
|||||||
9
а cкладові вектора вільних членів L обчисляться як різниці відповідних координат певних пунктів, відомих в обох системах координат, тобто
xT1 x1yT1 y1 L xT 2 x2 .yT 2 y2xT 3 x3
yT 3 y3
Система нормальних рівнянь запишеться так:
AT A p AT L 0 . |
|
Введемо позначення |
|
N ATA ; |
W ATL . |
Тепер, з формулами (26) система рівнянь (25) прийме вид
N p W 0.
(24)
(25)
(26)
(27)
Обчислимо головний визначник і визначники для кожного невідомого ( с1,с2, pc, ps), маємо:
|
N11 |
N12 |
N13 |
N14 |
|
|
|
|
W1 |
N12 |
N13 |
N14 |
|
|
|
|
N21 |
N22 |
N23 |
N24 |
; |
c1 |
|
W2 |
N22 |
N23 |
N24 |
, |
(28) |
||
|
N31 |
N32 |
N33 |
N34 |
|
|
|
|
W3 |
N32 |
N33 |
N34 |
|
|
|
|
N41 |
N42 |
N43 |
N44 |
|
|
|
|
W4 |
N42 |
N43 |
N44 |
|
|
|
|
|
N11 |
W1 |
N13 |
N14 |
|
|
|
N11 |
N12 |
W1 |
N14 |
|
|
|
|
|
|
|
|
|
|
|||||||||
c2 |
N21 |
W2 |
N23 |
N24 |
; |
pc |
|
N21 |
N22 |
W2 |
N24 |
, |
(29) |
||
|
|
N31 |
W3 |
N33 |
N34 |
|
|
|
N31 |
N32 |
W3 |
N34 |
|
|
|
|
|
N41 |
W4 |
N43 |
N44 |
|
|
|
N41 |
N42 |
W4 |
N44 |
|
|
|
|
N11 |
N12 |
N13 |
W1 |
|
|
ps |
N21 |
N22 |
N23 |
W2 |
. |
(30) |
|
N31 |
N32 |
N33 |
W3 |
|
|
|
N41 |
N42 |
N43 |
W4 |
|
|
Для обчислення визначників 4-го порядку за допомогою калькулятора можна використати схему Гаусса-Дулітля і продовжити обчислення, але цей процес
10