

Тема 4 Загальна характеристика приладів для фотограмметричних та картографічних робіт
.pdfзображеннях об'єкту. Найефективніше ця задача розв'язується по тривимірних моделях, побудованих на універсальних приладах (аналогових, аналітичних і цифрових).
У 1980-90 рр. у фотограмметричному виробництві СРСР використовувались аналогові універсальні прилади (стереопроектори СПР-2, СПР-3, стереографи СД- 3, СЦ, стереометрографи і топокарт-ортофот).
Стереографи і стереопроектори - універсальні прилади механічного типу з перетвореними зв'язками проектуючого проміння. Це прилади вітчизняного виробництва з інструментальною точністю вони були призначені для обробки планових аерофотознімків. Стереометрограф і топокарт-ортофот - прилади механічного типу з подібними зв'язками виробництва фірми "Karl Zeizz" (ГДР) використовувались також для обробки планових аерофотознімків і наземних знімків нормального і паралельного випадків зйомки.
Аналогові універсальні прилади забезпечують точність створення карт і планів в масштабах 1 : 5 000, 1:10 000, 1 : 25 000 і дрібніше.
Похідні матеріали для побудови моделі на універсальному приладі у всіх випадках однакові: аеронегативи (діапозитиви), елементи внутрішнього орієнтування знімків, координати опорних точок (знімки з опознаками, каталог їх координат), матеріали дешифрування, параметри аерофотознімання (H, f), планшет з координатною сіткою і рамкою трапеції.
Модель можна будувати по установочних елементах або по умові компланарності (через взаємне орієнтування знімків).
На аналогових приладах перевагу віддають другому способу, оскільки на цих приладах елементи внутрішнього і зовнішнього орієнтування знімків встановлюються з недостатньою точністю.
По умові компланарності побудова моделі включає наступні процеси:
-внутрішнє і взаємне орієнтування знімків;
-горизонтування і масштабування моделі місцевості. Після цього виконується зйомка контурів і рельєфу.
Оцінка точності і контроль якості побудови моделі виконується по
залишкових поперечних параллаксах і розбіжностях координат на опорних точках,
атакож по зв'язках суміжних моделей.
Внаш час аналогові універсальні прилади замінені аналітичними і цифровими стереоплоттерами.
Аналітичні універсальні прилади (АУП) мають значні переваги перед аналоговими:
- висока точність (1-2 мкм) за рахунок зменшення інструментальних помилок, використання високоточної оптико-механічної системи та обліку всіх видів систематичних помилок з використанням надлишкових вимірювань;
- не накладається ніяких обмежень на елементи внутрішнього і зовнішнього орієнтування знімків;
- велика частина процесів автоматизована; - можливо вирішувати будь-які фотограмметричні задачі.
Ці прилади використовують в основному для великомасштабних зйомок. АУП незамінні при обробці космічних знімків.
На підприємствах Росії та України в основному використовують: Стереоанаграф - 4, SD-2000, SD-20, TRASTER, ASP, Дікомат.
УРосії широко застосовують прилади SD-20, за ліцензією фірми "Leica". Прилад призначений для обробки аерокосмічних знімків і створення картографічних оригіналів або цифрових карт та планів місцевості. Він дозволяє виконувати збір даних для аналітичної фототріангуляції, створення банків даних земельного кадастру.
Відносні помилки визначення висот складають 1:10000 - 1:12000, похибки положення контурних точок - 9-10 мкм що дає можливість застосування даного приладу для картографування до масштабу 1: 500) і створення баз даних міського кадастру. Принципова схема різних аналітичних плоттерів однакова. Всі вони включають такі блоки і системи:
- оптико-механічну систему, що є прецизійний автоматизований стереокомпаратор;
- комп'ютер; - блок управління;
- система датчиків стереокомпаратора, передаючих лінійні переміщення по напрямах х, у кареток знімків і об'єктивів через інтерфейс на ЕОМ;
- штурвали координатно-вимірювальної системи (X, Y, Z), обертання яких через датчики і інтерфейс передаються на ЕОМ. У чисельному вигляді ці значення відповідають координатам точок моделі;
- сервомотори, які переміщують каретки знімків і об'єктиви наглядової системи по значеннях координат xh, yh, x2, у2, які обчислені на ЕОМ.
Аналітичні універсальні прилади (плоттери) працюють в двох режимах: 1) стереокомпаратора (прямий); 2) універсального приладу (зворотний).
Упершому режимі виконуються операції внутрішнього і взаємного орієнтування знімків. Оператор наводить марки на координатні мітки для внутрішнього орієнтування і на стандартні точки для взаємного орієнтування.
Результати вимірювання координат точок знімка передаються в ЕОМ, де по них обчислюються параметри перетворення координат з системи координат приладу в системи координат знімків. Потім обчислюються перетворені і виправлені за вплив систематичних помилок координати стандартних точок. В результаті розв'язуються рівняння взаємного орієнтування знімків. Контроль рішення виконується по залишкових поперечних параллаксах.
Після завершення взаємного орієнтування знімків включається режим універсального приладу (зворотного зв'язку).
Уцьому режимі за допомогою штурвалів X, У, Z і датчиків задаються координати точок моделі у вигляді цифрових сигналів, які в інтерфейсі перетворяться в цифровий код і передаються в ЕОМ.
Використовуючи формули зв'язку координат точок місцевості і знімка (умова колінеарності), обчислюються координати точок на лівому і правому знімках відповідних точок моделі.
Для зовнішнього орієнтування моделі штурвалами X, У, Z наводять марку на опорні точки і визначають їх фотограмметричні координати. Вимірюють X, У, Z не менше ніж чотирьох опорних точок. Після цього ЕОМ вирішує задачу визначення елементів зовнішнього орієнтування моделі відомим аналітичним способом.
Оцінка точності і контроль якості визначення елементів зовнішнього орієнтування моделі виконується по розбіжностях координат опорних точок. На
закінчення обчислюють елементи зовнішнього орієнтування знімків по елементах взаємного орієнтування знімків і зовнішнього орієнтування моделі.
Елементи орієнтування знімків визначають в геодезичній або іншій заданій системі координат, і відповідно в цій системі здійснюватиметься зворотна засічка на точки моделі.
Після цього переходять до роботи з моделлю і здійснюють зйомку рельєфу і контурів або в графічному, або в цифровому вигляді.
Для визначення точності побудови моделі вимірюють координати контрольних точок, вибираючи їх по можливості в різних частинах моделі.
Середні похибки координат контрольних точок в плані не повинні перевищувати 0,3 мм в масштабі карти, а по висоті 0,3 висоти перетину рельєфу.
Для збору топографічної інформації на SD-20 запускають програму Micro Station з блоком PRO 600, призначеним для стереоскопічного збору інформації. Збір інформації про контури виконується стереоскопічно з одночасним дешифруванням і кодуванням об'єктів. Цифрова інформація про контури збирається по шарах. В процесі збору об'єкти, що викликають сумніви відносно конфігурації і характеристик, фіксують на контрольній і графічній копіях для подальшої польової доробки.
Одночасно із збором метричної інформації повинне виконуватися систематичне кодування об'єктів. Для цієї мети використовують класифікатор топографічних об'єктів на відповідний масштабний ряд топографічних карт (планів). Зібрана топографічна інформація зберігається в базі даних по шарах.
У багатьох аналітичних плоттерів є можливість первинного редагування одержаних даних, зокрема зміна форм або створення нового об'єкту з наявних фрагментів. Для цього збирана топографічна інформація візуалізується у реальному часі на екрані монітора.
Перед зображенням рельєфу визначають відмітки характерних точок, які повинні бути підписані на карті з густиною 8-10 точок на 1 дм2 карти. Відмітки, що підписуються на карті, визначають як середнє з двох прийомів вимірювань.
Горизонталі одержують в результаті стереоскопічного трасування поверхні стереомоделі вимірювальною маркою, встановленою на висоту горизонталі. Програмне забезпечення візуалізує на екрані монітора положення горизонталей. Одночасно із стереоскопічним малюванням горизонталей визначають чисельні характеристики елементів рельєфу (висоти урвищ, насипів і ін.).
Складений оригінал карти повинен бути зведений з суміжними листами карти. Розбіжності в положенні контурів з чіткими контурами не повинні перевищувати: 1,0 мм - в рівнинних і горбистих районах; 1,5 мм - в гірських і високогірних районах.
Розбіжності в положенні горизонталей на суміжних листах карти не повинні перевищувати полуторної точності відображення рельєфу.
В наш час оптимальними для зйомки контурів і рельєфу є цифрові фотограмметричні станції (ЦФС), які дають можливість автоматизувати процеси внутрішнього і взаємного орієнтування знімків, побудови цифрової моделі рельєфу.
Побудова моделі на ЦФС виконується аналогічно аналітичним плоттерам і по тому ж алгоритму.
Відмінність полягає у тому, що в АУП вимірювання виконують по реальних фотознімках, а на ЦФС – по цифрових зображеннях на екрані дисплея. Для

перетворення фотозображення в цифрове повинні використовуватися сканери, що забезпечують високу метричну і фотометричну якість.
По суті ЦФС є комп'ютером з високим рівнем швидкодії, забезпечений пакетом програм, що забезпечують аналітичну побудову моделі по знімках, перетворення зображення і виконання операцій по формуванню кінцевої продукції. Крім того, у ЦФС повинна бути обов'язково система, що забезпечує стереовимірювання.
Вона може бути реалізована способом мигання, поляроїдів, анагліфів або оптичним. Оскільки вимірювання в ЦФС виконуються на екрані дисплея в цифровому коді (у пікселях) і управляються комп'ютером, то в ЦФС не вимагається оптико-механічної системи (стереокомпаратор), датчиків інтерфейсу і електромоторів, які є головною складовою системи аналітичних плоттерів. Характеристика ЦФС визначається класом комп'ютера, типом сканера і пакетом програм для вирішення фотограмметричних задач.
У країнах СНД в основному використовують ЦФС "Фотомод", "Талка", , "ERDAS", "SDS".
В якості прикладу приведемо характеристики цифрової фотограмметричної станції «Дельта», яка найшла застосування в Україні.
Прилади для стереоскопічної обробки аерофотознімків
Стереокомпаратор - це високоточний стереофотограмметричний прилад, призначений для виміру на фотознімках координат крапок, поздовжніх і поперечних паралаксів і різниць поздовжніх паралаксів, тобто величин х, в, р, q, р. На станині приладу 1 установлена основна каретка 2, яку можна переміщати по напрямних за допомогою штурвала ШХ. Напрямок переміщення основної каретки приймається за вісь абсцис приладу. Величина переміщення основної каретки визначається по шкалі абсцис X. На основній каретці розташовані ліворуч і
праворуч додаткові каретки 3 і 4.
Ліва каретка встановлена на напрямних, паралельних напрямним основної каретки, так що її можна переміщати по основній каретці в напрямку осі абсцис, відкріпивши попередньо закріпний гвинт. Це переміщення використається для установки потрібної відстані між касетами перед початком вимірів, після чого ліва каретка закріплюється на основній каретці. Права каретка встановлена на взаємно перпендикулярних напрямних, по яких її можна переміщати на основній каретці уздовж осей абсцис і ординат за допомогою спеціальних гвинтів Р и Q. Гвинт Р, що переміщає каретку уздовж осі абсцис, називається гвинтом поздовжніх паралаксів. Гвинт Q, що переміщає каретку уздовж осі ординат, називається гвинтом поперечних паралаксів. Величину переміщення правої каретки можна відрахувати по шкалах поздовжніх і поперечних паралаксів. На лівій і правій каретках установлені касети для фотознімків. У середині кожної касети укріплене скло, на яке кладуть негатив або діапозитив, а під касетами перебувають лампи для

висвітлення, так що знімки в касетах спостерігаються на просвіт. За допомогою спеціального гвинта кожну касету можна повертати у своїй площині на кут κ.
Центр обертання відзначений хрестом на склі касети. З ним сполучають головну точку знімка, тобто знімок у касеті центрують. На краях скла касети нанесені координатні мітки у вигляді тонких штрихів. Якщо з ними сполучити координатні мітки знімка, то головна точка знімка збіжиться із центром обертання касети.
Над касетами розташовані об'єктиви спостережної системи. Спостережна система складається з об'єктивів, окулярів і призм і являє собою бінокулярний мікроскоп. У ній установлені точкові марки, за допомогою яких можна візувати на точки позорової стереомоделі. Окулярна частина спостережної системи укріплена на станині приладу нерухомо, а об'єктиви встановлені на напрямних, по якій їх можна переміщати за допомогою спеціального штурвала ШУ. Напрямок переміщення об'єктивів прийнято за вісь
ординат приладу. При переміщенні об'єктивів, так само як при переміщенні основної каретки приладу, спостерігач бачить переміщення позорової марки на стереомоделі в горизонтальній площині. Переміщення правої каретки уздовж осей абсцис і ординат ідентично додатковому переміщенню правої марки приладу.
Величину переміщення об'єктивів спостережної системи можна відрахувати по шкалі ординат У. Точність відліків по шкалах приладу різна в різних стереокомпараторів - від 0,01 до 0,001 мм. Розташувавши знімки в касетах стереокомпаратора й одержавши по них стереоефект, можна за допомогою марок візувати на точки стереомоделі й вимірювати координати крапок і поздовжні й поперечні паралакси.
На виробництві широко застосовується стереокомпаратор 1818, що виготовляє в ГДР фірмою "Карл Цейсе, Йена". У цього стереокомпаратора всі шкали замінені лічильниками планетарного типу, що забезпечує підвищення точності відліку по шкалах і зручність відлічування. Точність відліку по шкалах абсцис і ординат стереокомпаратора 0,004 мм, по шкалі поздовжніх паралаксів 0,001 мм, поперечних паралаксів - 0,002 мм. Частина спостережної системи, що містить об'єктиви й переміщається уздовж осі ординат, поміщена усередині приладу - під касетами.
В останні роки стереокомпаратори знайшли широке застосування при згущенні геодезичного обґрунтування по аерофотознімках аналітичним методом. При цьому методі згущення виміри по аерофотознімках виконуються за допомогою стереокомпаратора, а потім за результатами цих вимірів обчислюються координати точок на місцевості за допомогою електронно-обчислювальної машини. У зв'язку з розвитком цього методу з'явилася необхідність у створенні стереокомпараторів підвищеної точності й з максимальною автоматизацією процесу вимірів. За останні роки в ряді країн були створені високоточні автоматизовані стереокомпаратори. До них відносяться ВКВ-1, СКА-18, СКА-30, створені в СРСР, "Стекометр" (ГДР), СОМ (Франція), "Рекординг" (Англія).
Призначення та побудова топографічного стереометра проф. Ф. В. Дробишева (СТД)
За допомогою стереометра виконувався провідний процес диференційованого методу створення карт – процес рисовки рельєфу.

Схема топографічного стереометра СТД-2 із шістьома коректорами представлена на малюнку, де ліва й права касети, що служать для кріплення аерофотознімків, змонтовані на основному супорті 10, що переміщається уздовж осі абсцис на станині 8.
При обертанні штурвала 14 обидві касети з аерофотознімками
переміщаються уздовж прямій, що з'єднує центри обертання касет, що є віссю х приладу. Величина цього переміщення відраховується по шкалі супорта 10.
Перпендикулярно до осі абсцис у центрі приладу нерухомо укріплена напрямна 4, по якій переміщається спостережна система 6 при обертанні кремальєри 7. Це звичайний чотирьохдзеркальний стереоскоп з лінзами, що дають дворазове збільшення. Відстань між малими, внутрішніми дзеркалами можна встановлювати по очному базисі спостерігача, а усунення поперечного паралаксу, що виникає на краях стереопари, досягається переміщенням лівої лінзи паралельно осі ординат за допомогою гвинта 15. На корпусі стереоскопа укріплена освітлювальна система, що складається із двох циліндричних ламп по 40 Вт і ребристих охолоджувачів.
Переміщення спостережної системи по осі ординат приладу, а касет - по осі абсцис дає можливість переглядати стереоскопічно всю стереопару.
Вимірювальними марками в приладі служать нитки 3 і 5, натягнуті в безпосередній близькості над аерознімками в спеціальних ниткотримачах, сконструйованих під касетами. У початковому положенні нитки паралельні осі ординат; якщо ліва нитка збігається із центром обертання лівої касети, то права - із точкою 12 - відстоїть від свого центра на величину базису. Нитки можуть повертатися в площинах, паралельних касетам, під дією відповідних коректорів. Касети можуть повертатися у своїх площинах при відкріпленні гвинтів 2 і 9, крім того, ліва касета переміщається уздовж осі абсцис на супорті 13 паралактичним гвинтом 1 із ціною поділки на відліковій голівці, рівної 0,01 мм. Права касета теж може переміщатися уздовж осі абсцис на диференціальному супорті 11, але це переміщення відбувається під дією коректорів, відлікові шкали яких позначені цифрами І, ІІ, V. Цифрами ІІІ й ІV показані шкали коректорів, що викликають поворот правої нитки біля точки 12, що відповідає на всьому протязі нитки зміні абсцис правої касети, а цифрою VІ - шкала коректора, що викликає аналогічний поворот лівої нитки, що приводить до відповідної додаткової зміни абсцис правої касети. Таким чином, загальна зміна абсцис у стереометрі СТД-2 складається із шести корекцій під дією шести коректорів. Коректори стереометра так улаштовані,
що |
кожний |
з |
|
|
x2 |
|
|
|
|
|
|
|
|
них уводить |
|
виправлення |
|
x |
H |
xy |
y |
2x p |
|
|
|
y p |
|
відповідно |
|||
|
|
( p) |
|
|
|
|
|
|
л |
|
|
л |
|
||
до |
одним |
f |
|
f |
f |
f |
членів |
||||||||
зі |
|
f |
|
|
|
|
|
||||||||
формули.
Так, наприклад, коректори І, ІІ, ІІІ й ІV уводять виправлення в абсциси, що відповідають першим чотирьом членам, а коректори V і VІ - п'ятому й шостому членам цієї формули. При цьому виправлення в абсциси мають знаки, зворотні знакам виправлень у різницю поздовжніх паралаксів.
Коректори І і ІІ, називані разом масштабно-конвергентним корегувальним механізмом, являють собою загальну конструкцію, що складається зі зчленування двох важелів і двох лінійок.
Коректори ІІІ й ІV з'єднані в загальну конструкцію, називану механізмом поперечної корекції й уводять виправлення, що відповідають третьому й четвертому членам формули. Цим механізмом здійснюються малі повороти правої нитки, отже, при стереоскопічному візуванні на точки з різними координатами необхідно правий фотознімок додатково переміщати уздовж осі абсцис, що й відповідає введенню потрібних виправлень.
Коректор ІV дає постійний поворот ниткотримача з ниткою 1, для чого відкріплюється гвинт 4 і на потрібний кут повертається лінійка 5 разом з ниткотримачем біля повторювальної осі 10.
Додатковий коректор V уводить виправлення в абсцису правого знімка за вплив п'ятого члена формули.
Коректор VІ називається також додатковим, тому що здійснює поперечну корекцію, уточнюючи дію четвертого коректора відповідно до шостого члена формули, повідомляючи лівої нитки деякий малий поворот.
Призначення й побудова стереопроектора проф. Г. В. Романовського
Стереопроектор (СПР)- високоточний універсальний прилад, призначений для створення й відновлення топографічних карт будь-яких масштабів. У виробництві цей прилад широко застосовується й для згущення планового й висотного геодезичного обґрунтування.
СПР - прилад з механічною засічкою. На ньому можна обробляти планові аерофотознімки формату 18x18, отримані камерами з f = 35-350 mm. Фокусна відстань проектування в СПР можна встановлювати в межах 150-300 мм. Зазвичай Fп ≠ f, і обробка знімків іде при перетворених зв'язках проектуючих променів.
Стереомодель спостерігається оптичним способом. Збільшення спостережної системи - 4 і 6 . Вимірювання ведуться по методу позорової марки. Вимірювальні марки освітлювальні, змінні.
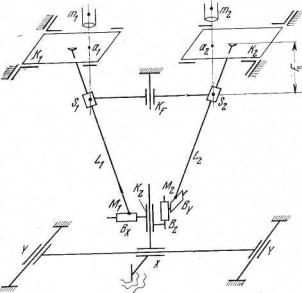
Принципова схема. У верхній частині приладу розташовуються каретки К1, К2, що несуть касети, у які закладають фотознімки, що становлять стереопару. Фотознімки висвітлюють лампами й розглядають за допомогою спостережної системи, окулярна голівка якої встановлюється за індивідуальним даними спостерігача. Фотознімки в приладі завжди займають горизонтальне положення, тому спостереження їх ведеться ортогональним променем. У кожну галузь спостережної системи уведена вимірювальна марка m1, m2 . Спостерігач бачить
зображення лівого й правого знімка разом із зображенням марки. При спостереженні однойменних ділянок двох знімків ці зображення, зливаючись, дають стереоскопічну модель місцевості й одну просторову марку.
З каретками фотознімків зчленовуються своїми верхніми кінцями високоточні проектуючи стрижні L1, L2. Ці стрижні пропущені через кардани S, укріплені на каретці фокусних відстаней приладу KF. Центри карданів S є механічними центрами проекції в приладі. Відстань від точки S до площини фотознімка є фокусною відстанню проектування Fn. Каретку KF можна переміщати по вертикальних напрямних для зміни Fn. Нижніми кінцями М стрижні опираються на висотно-базисну каретку Kz. За допомогою ножного штурвала каретка Kz може переміщатися в напрямку осі Z приладу. За допомогою системи кареток X, Y висотно-базисна каретка може переміщатися також у напрямку осей X, Y приладу. Ці рухи здійснюються ручними штурвалами. При зміні положення
висотно-базисної каретки |
стрижні, обертаючись біля нерухомих точок S, |
пересувають знімки в площині XY щодо нерухомої спостережної системи. |
|
Спостерігач сприймає це як просторове переміщення марки в напрямках осей X, Y, |
|
Z відносно стереомоделі. |
|
При сполученні марки |
т з якою-небудь точкою знімка стрижень, що |
проектує, займає положення, що відповідає напрямку променя, що проектує. Коли обидві марки m збігаються з однойменними точками лівого й правого знімків, стрижні будують точку геометричної моделі місцевості. При цьому просторова марка М збігається із цією же точкою спостережуваної стереоскопічної моделі. Координати точок геометричної моделі можуть бути відлічені по лічильниках координат X, Y і по лічильнику висот А.
Проектування точок геометричної моделі на екран для створення графічного плану місцевості виробляється за допомогою олівця, укріпленого на каретці X приладу, який повторює рухи марки в площині XY.
Масштаб геометричної моделі залежить від величини встановленого базису проектування. Однак діапазон значень масштабів, у яких можна будувати модель на СПР, залежить від конструктивних особливостей приладу. На малюнку показаний момент побудови важелем, що проектує, середньої по висоті точки геометричної моделі А. При спостереженні інших точок моделі, що відрізняються по висоті від точки А, висотно-базисна каретка буде переміщатися по осі Z. Щоб високі й низькі точки моделі не виходили при цьому за межі можливих переміщень каретки KZ, потрібно, щоб точка А будувалася при середньому по висоті положенні висотно-базисної каретки. Відстань Dcp від площини знімків до середньої площини проектування постійна для кожного приладу, а висота проектування точки А буде залежати від установленого значення Fn. Найбільше значення середньої висоти проектування Hmах і самий великий масштаб моделі 1/M буде при мінімальній фокусній відстані проектування Fmіn.
Призначення й побудова стереографа проф. Ф. В. Дробишева (СД)
Стереограф (СД) - універсальний прилад механічного типу, призначений для створення карт великих і середніх масштабів і для згущення висотно-планового обґрунтування. На приладі обробляють планові аерофотознімки формату 18X18 див, отримані камерами з фокусною відстанню f = 55 - 210 мм при постійній фокусній відстані проектування в приладі F = 130 мм. Обробка фотознімків ведеться з перетвореними зв'язками проектуючих.

Форма засічки в приладі – трикутник + паралелограм. Фотознімки мають оригінальне розташування один за одним, завдяки чому прилад вийшов дуже компактним. Спостереження стереомоделі ведеться оптичним способом, стерео вимірювання - методом позорової марки.
Вимірювальні марки чорного кольору у формі крапок.
Перша модель стереографа створена в 1956 р., на підставі якої
був випущений серійний виробничий прилад СД-1. У наступне десятиліття в конструкцію приладу вводилися різні вдосконалення, що привели до виготовлення поліпшених зразків приладу: СД-1М, СД-2 і СД-3 - для створення графічного плану й УСД - для просторового фототріангулювания. На базі СД-3 був створений також стереограф з фотоприставкою ОФПД (ортофотопроектор), що дозволяє створювати карту рельєфної місцевості на основі фотоплану.
При використанні доданого СД-1М пантографа співвідношення масштабів створюваної карти й фотознімка може дорівнювати 0,5-2 . У моделі СД-2 і наступних, де пантограф замінений координатографом, R = 0,5 - 3 . Максимальне перевищення в межах однієї стереопари - 0,35 H.
Принципова схема всіх моделей приладу зводиться до наступного. На станині приладу по напрямних X переміщається каретка X. У лівій частині каретки X укріплена вертикальна напрямна Z для переміщення висотно-базисної каретки Kz. У середній частині каретки X змонтовані напрямні диференціальних кареток, на яких перебувають знімкотримачі. Фотознімки в приладі завжди горизонтальні й можуть обертатися на кут κ . Висотно-базисна каретка несе супорти ВХ, BY і Bz, на кульові шпинделі яких Мл і Мп опираються високоточні проективні важелі, пропущені через нижні кардани Кл і Кп, зв'язані зі знімкотримачами, та через верхні кардани Sл і Sп , що слугують механічними центрами проекції в приладі. Кардани Sл і Sn нерухомо укріплені на станині приладу. Базис проектування встановлюється між нижніми кінцями важелів, що проектують, причому лівому (ближньому) важелю доданий рух Вх, а правому (далекому) - рухи BY і Bz. Відстань SK при прямовисному положенні важеля, є фокусною відстанню проектування Fп. Фотознімки висвітлюються знизу лампами, а над ними укріплена нерухома спостережна система, що дозволяє вести спостереження ортогональним зоровим променем.
При роботі штурвалами X, У и Z переміщається висотно-базисна каретка, а разом з нею й кульові шпинделі Мл і МП, проекційні важелі, обертаючись біля точок S, тягнуть за собою кардани К, пов'язані з фотознімками.
Фотознімки переміщаються в площині XY (на ту ж величину, що й кардани) відносно спостережливої системи. Коли візирні марки збігаються з однойменними точками двох фотознімків, проекційні важелі, повторюючи хід променів, що проектують, будують своїми нижніми кінцями точку геометричної моделі місцевості. Тому що точка М не завжди нижче, ніж точка ДО, масштаб геометричної моделі крупніше масштабу фотознімків. Координати точок можуть бути відлічені по лічильниках X, Y,Z.
ЦИФРОВА ФОТОГРАММЕТРІЯ
Звичайний фотознімок, математичною моделлю якого є центральна проекція, розглядався нами впродовж всіх попередній параграфів. Фотозображення, зафіксоване на фотоплівці, фотопластинці чи фотопапері, вимірюється і проходить всі стадії фотограмметричної обробки за різними технологіями аналогової чи аналітичної фотограмметрії. З математичної точки зору фотознімок - це сукупність трчок ак з плоскими прямокутними координатами xk yk (в заданій системі плоских координат). Фотознімок як центральна проекція визначається елементами внутрішнього орієнтування (f, x0 y0), а його положення в просторі (деякій просторовій системі координат) фіксується елементами зовнішнього орієнтування
(Xs,Ys, Zs. α, ω, κ).
Цифрова фотограмметрія оперує з іншим типом зображення - цифровим знімком.
Цифровий знімок - це сукупність елементів, які утворюють матрицю розміром m*n. Елемент носить назву - піксел (pixel) від англійського скорочення "picture JC element". Положення кожного піксела в матриці визначається номером рядка і та номером стовпчика j. Сукупність пікселів утворює зображення (на екрані ПЕОМ, на листі паперу тощо), яке називають растровим зображенням. Кожний піксел несе в собі лише інформацію про ступінь почорніння (для чорно-білого зображення) або інформацію про колір (для кольорового зображення).
Отримати цифровий знімок можна двома шляхами. Перший з них - це перетворення фотознімка в цифровий знімок шляхом сканування. Другий базується на використанні спеціальних знімальних камер - так званих цифрових камер. Вони подібні до фотокамер, проте зображення об'єкта не є фотографічним, а цифровим.
У цифровій камері об'єктив проектує зображення на так званий "пристрій із зарядовим зв'язком" (ПЗЗ) - сукупність світлочутливих елементів, кожен з яких виробляє фотострум залежно від світлової енергії, яка падає на нього. В подальшому фотострум посилюється, перетворюється та фіксується на магнітному або оптичному носії інформації - магнітній плівці, диску, дискеті тощо. Це означає, що цифрове зображення є легкодоступним для сучасної ПЕОМ: його можна зчитати з дискети, переписати з оперативної чи буферної пам'яті камери в пам'ять ПЕОМ, виконувати різноманітні операції з цифровим зображенням (копіювання, фільтрація, посилення, геометрична корекція тощо).
Фізичні основи ПЗЗ описані в спеціальній літературі; тут ми не зупиняємось на цих аспектах, але зазначимо, що саме прогрес в області мікроелектроніки став причиною практичного застосування цифрової фотограмметрії. Без надійних, високоякісних ПЗЗ з високою роздільною здатністю не можна говорити про цифровий фотограмметричний знімок.
В сучасних ПЗЗ нагромаджуючими елементами є фотодіоди з кількістю елементів в лінійці від 1024 до 8192. Спеціалісти вважають, що можливий подальший прогрес в області створення ПЗЗ-матриць. Вже тепер провідна фірма світу Sony випускає матриці з кроком елементів 3 на 5 мкм (тобто віддаль між елементами становить 1,7 мкм). Прогнозується, що з'являться однокристальні прилади з кількістю елементів 8000x8000 при досить малих розмірах приладів.
Усе це, без сумніву, впливає на технологію отримання зображення, поступово витісняючи фотографічні методи. Уже тепер розвивається високоточне цифрове аерознімання, яке приходить на зміну аерофотозніманню. На підтвердження цього на XIX Конгресі Міжнародного Товариства фотограмметрії та дистанційного зондування (ISPRS), що відбувся в липні 2000 р. в Амстердамі,