

Усі лекції
.pdfВСТУП
Космічна геодезія – розділ геодезичної науки, в якому вивчаються питання використання спостережень штучних та природних супутників Землі і планет для вирішення наукових та науково-технічних задач геодезії.
При цьому в космічній геодезії використовуються як результати спостережень супутників з поверхні Землі так і результати вимірювань,
виконаних безпосередньо на супутниках. Космічна геодезія є розділом геодезії,
який найшвидше розвивається. Вона використовує весь арсенал вимірювальних засобів, представлених сучасною фізикою та технікою.
Основними завданнями космічної геодезії є:
Глобальні:
•Визначення фундаментальних сталих, які характеризують форму,
розмір та добове обертання Землі, Місяця і планет (нп.: параметри загального земного еліпсоїда).
•Створення геоцентричних та плането центричних систем координат та встановлення взаємозв’язків між ними.
•Вивчення гравітаційного поля Землі, Місяця і планет.
Прикладні:
•Визначення координат точок земної поверхні в прийнятій системі координат.
•Визначення взаємного положення пунктів.
1.МЕТОДИ ТА ЗАДАЧІ КОСМІЧНОЇ ГЕОДЕЗІЇ
1.1.Методи космічної геодезії
Впроцесі розвитку теорії руху штучних супутників Землі (ШСЗ) виникали та розвивалися різні методи космічної геодезії. На сьогоднішній день відомі такі основні методи космічної геодезії: геометричний, орбітальний, динамічний та оперативний. Якщо розглядати методи космічної геодезії в порядку їх розвитку (появи), то першим потрібно вважати геометричний метод. Він заснований на синхронному фотографуванні ШСЗ на фоні зоряного неба міні-
мум з двох пунктів на поверхні Землі. Такий метод дає можливість визначати
1
напрямок вектора, який з’єднує ці пункти. Багато таких векторів створюють векторну просторову мережу (космічну тріангуляцію). Врівноваження і опра-
цювання такої мережі дає можливість визначати координати нових пунктів.
Наступним є орбітальний метод, в якому ШСЗ являється дуже високою візирною ціллю, яка рухається із значною швидкістю (до декілька градусів у секунду). Цей метод дав можливість з’єднати материки та острови Землі в одну геодезичну мережу (глобальну геодезичну мережу). Проте в такій мережі є можливість визначати тільки відносні координати нових пунктів (тобто в системі вихідних координат). При цьому питання прив’язки космічної тріангуляції до центру мас Землі залишався відкритим.
Найбільш загальним методом космічної геодезії вважається динамічний метод, який заснований на дослідженні еволюцій орбіти ШСЗ в часі. Для реалізації даного методу необхідно мати адекватну модель руху ШСЗ. Точність даного методу в значній мірі залежить від цієї моделі. Такий метод дозволяє получити положення пунктів в єдиній для всієї планети системі координат із початком в центрі мас Землі, а також визначити зовнішнє гравітаційне поле Землі в цій системі.
По мірі уточнення моделей сил, які діють на ШСЗ в русі популярності набув оперативний метод. Цей метод являється частковим випадком динамічного, якщо припустити, що моделі сил, які діють на ШСЗ побудовані із необхідною точністю та не уточняються в процесі розв’язання. В орбітальному методі на основі вимірювань виконаних на наземних пунктах або безпосередньо із супутника одночасно визначаються координати пунктів і елементи орбіти ШСЗ.
1.2.Задачі космічної геодезії
Розвиток наведених методів космічної геодезії зумовлений появою нових геодезичних задач. Всі геодезичні задачі, які вирішують за допомогою спостережень штучних і природних супутників, поділяються на геометричні та динамічні.
Геометричними задачами є побудова просторових геодезичних мереж за
2
допомогою синхронних або квазісинхронних спостережень ШСЗ. В цьому випадку не потрібно оперувати точними значеннями координат супутника, так як він вважається високою рухомою ціллю. Координати досить знати дуже наближено, щоб забезпечити спостереження в заданий момент часу з двох або більше станцій. Також можна спостерігати спеціальні лампи-спалахи,
встановлені на літаках, ракетах або інших рухомих візирних цілях.
В результаті вирішення геометричних задач визначається взаємне положення пунктів в системі, що задається вихідними пунктами, наприклад в системі деякого референц-еліпсоїда.
Особливою проблемою при цьому є масштабування космічних геодезичних мереж, бо потрібно оперувати точною інформацією про одну або декілька базових сторін (пункт-пункт, пункт-супутник або супутник-супутник).
У динамічних задачах космічної геодезії неодмінною умовою є знання з найкращою точністю координат супутника. Це можливо при наявності детально розробленої теорії руху супутника, точної моделі гравітаційного поля і надійних даних про параметри атмосфери, а також їх зміну.
Динамічний метод полягає у спільному визначенні за результатами спостережень супутників координат пунктів; параметрів, що характеризують гравітаційне поле Землі; поправок до деяких початкових параметрів орбіти, а
також параметрів, що характеризують атмосферу.
Значення координат пунктів, визначені динамічним методом, є в абсолютній системі координат, з початком в центрі мас Землі.
Поділ задач космічної геодезії на геометричні та динамічні, є певною мірою умовним. Бо Якщо теорія руху супутника відома з достатнім рівнем точності і якщо параметри гравітаційного поля Землі не вимагають уточнення,
тоді до геометричних задач можна віднести визначення розмірів загально-
земного еліпсоїда за спостереженнями ШСЗ, визначення вихідних геодезичних дат, визначення центру референц-еліпсоїда відносно центру мас Землі і визначення орієнтації осей референцної відносно геоцентричної системи координат.
3

1.СИСТЕМИ КООРДИНАТ І ЗВ'ЯЗОК МІЖ НИМИ
Вкосмічній геодезії використовують дві основні геоцентричні системи координат – інерціальну та земну. Елементи орбіт ШСЗ визначаються у умовній інерціальній системі координат, а координати об'єктів у умовній земній системі координат. Такий поділ призводить до необхідності застосування двох типів систем координат і встановлення однозначного взаємозв'язку між ними.
1.1.Умовна інерціальна система координат
Інерціальна система координат зафіксована в просторі на фундаментальну епоху відносно зірок і квазарів і не обертається з добовим обертанням Землі
(рис. 1). Її центр разом з осями переміщається паралельно самій собі разом з пилом Землі навколо Сонця. Це геоцентрична просторова ортогональна система координат.
Рис. 1. Умовна інерціальна система координат
Початком інерціальної системи координат є центр мас Землі. Вісь x
спрямована у точку весняного рівнодення і співпадає із лінією перетину площин земного екватора та екліптики. Вісь z – є перпендикулярна до осі x та
1
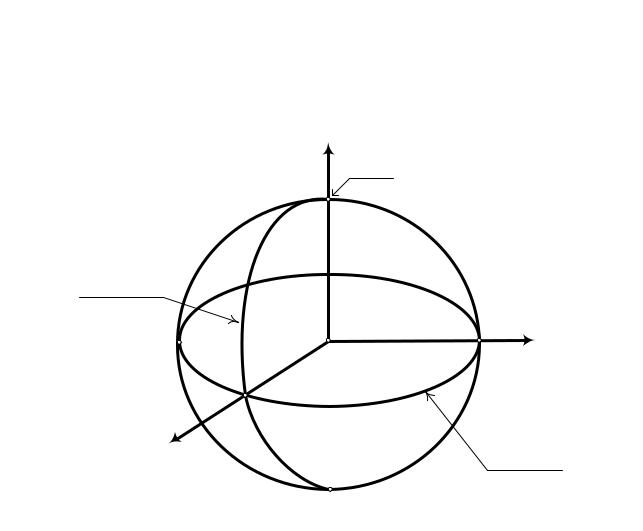
збігається із середньою віссю обертання Землі в просторі. Вісь y – є
перпендикулярною до площини утвореної осями x та z , і утворює з ними правосторонню ортогональну систему координат.
Практично положення точки весняного рівнодення визначається за результатами спостережень зірок вибраних із фундаментального каталогу
(FK5). Відповідно визначене положення інерціальної системи визначається із певною похибкою, а рух центра мас Землі навколо Сонця зазнає прискорень тому її називають умовною інерціальною системою координат (CIS – Conventional Inertial System). Оскільки точки весняного рівнодення є змінне то умовну інерціальну систему координат прийнято фіксувати на певну епоху.
Сучасною стандартною епохою є Юліанська дата J2000.0, яка відповідає 12h 1
січня 2000 р.
1.2. Умовна земна система координат |
Умовна земна система координат (CTS – Conventional Terrestial System) |
скріплена із пилом Землі і має добове обертання (рис. 2). Це геоцентрична |
просторова ортогональна система координат. |
Z |
CIO |
Середній |
Грінвіцький |
мередіан |
o |
Y |
середній |
екватор |
X |
Рис. 2. Умовна земна система координат |
2
Початок умовної земної системи координат є суміщений із центром мас Землі. Оскільки положення осі обертання Землі безперервно змінюється в наслідок дії непередбачуваних геофізичних явищ, тому вісь z прийнято орієнтувати вздовж середньої осі обертання Землі, положення якої визначено за певний проміжок часу. Ця вісь відповідає середньому положенню осі обертання Землі визначеній за період з 1900 по 1905 р. Вісь x – спрямована у точку перетину середнього екватора Землі і середнього Гринвіцького меридіану. Вісь
y– знаходиться у площині середнього екватора та є перпендикулярною до осей x та z і утворює з ними правосторонню ортогональну систему координат.
1.3.Зв'язок умовної інерціальної та умовної земної систем координат
Перехід від умовної інерціальної системи координат до умовної земної системи координат виконується за наступною залежністю:
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
= R( x p , y p ) |
R( S ) R( , , 0 ) |
R( , , ) |
y |
|
, |
(1) |
||
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
z |
|
|
|
|
X |
|
|
|
x |
|
|
|
|
CTS |
|
|
|
|
|
|
|
CIS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
де |
Y |
|
|
та |
y |
|
– координати пункту умовній інерціальній та умовній земній |
||||||||||||
|
Z |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
CTS |
|
|
|
CIS |
|
|
|
|
|
|
|
|
|
|||
системах координат відповідно, R( x |
, y |
) – матриця повороту умовної інерціальної |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
p |
p |
|
|
|
|
|
|
системи |
обумовлена |
рухом |
полюса, |
R( S ) – |
матриця повороту |
умовної |
|||||||||||||
інерціальної системи обумовлена зоряним часом, R( , , 0 ) – матриця повороту умовної інерціальної системи обумовлена нутацією, R( , , ) – матриця повороту
умовної інерціальної системи обумовлена прецесією.
Прецесія – повільне (у порівнянні з періодом обертання тіла) зміщення осі обертання Землі по конусу (рис. 3). Внаслідок дії прецесії точка весняного рівнодення рухається екліптикою назустріч уявному річному рухові Сонця
(випередження рівнодення), долаючи 50,29" на рік, полюси світу зсуваються між зорями, екваторіальні координати зір постійно змінюються. Одночасно з прецесійним рухом земна вісь зазнає невеликих нутаційних коливань із періодом 18,6 років та амплітудою 18,42".
3
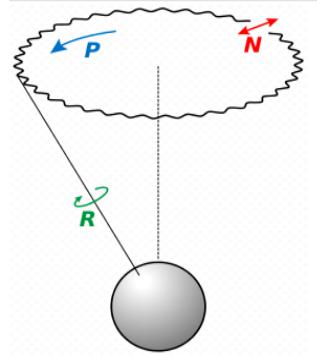
Рис. 3. Прецесія (P) нутація (N) та рух полюса (R) тіла, що обертається
Нутація – період коливання осі обертання в просторі разом з тілом викликані впливом Місяця та Сонця на тіло Землі (див. рис. 3). Коливання осі обертання Землі залежать від внутрішньої будови Землі. Ці періодичні коливання відбуваються відносно середнього (вікового) руху осі обертання Землі в просторі (тобто після прецесії). Основний період цих коливань співпадає з періодичним рухом ліній вузлів орбіти Місяця навколо Сонця.
Відомо, що полюси обертання Землі змінюють свої положення, такий процес називається рухом полюса (див. рис. 3). Для прикладу північний полюс Землі описує на її поверхні складну криву, яка не виходить за межі квадрата зі сторонами близько 30 м. При цьому його рух відбувається проти годинникової стрілки, якщо дивитися на північний полюс ззовні. Рух полюсів Землі, має періодичний характер. Основними періодами є 14-місячний період Чандлера і
12-місячний або річний період. Останній період явно пов'язаний із сезонними змінами в розподілі повітряних мас, з перенесенням мас води у вигляді снігу з однієї півкулі Землі в іншу, тощо. Період Чандлера – природний період коливань Землі, який був теоретично передбачений Ейлером ще в XVIII віці.
Якби Земля була абсолютно твердим тілом, природний період був би близьким
до 10 місяців. Однак Земля пластична і схильна до пружних деформацій,
4
внаслідок чого природний період збільшується до 14 місяців.
З 1988 року на Міжнародну службу обертання Землі (IERS – International Earth Rotation Service) покладено обов’язки встановлення найкращої практичної реалізації умовної земної системи координат. З цією метою постійно виконується уточнення параметрів обертання Землі. За результатами вимірів VLBI, SLR, DORIS, лазерної локації Місяця (LLR) та ГНСС-
спостережень у мережі міжнародної геодинамічної служби (IGS) визначається
рух полюса та початкового меридіану |
коректуються |
параметри матриці |
|||
R( , , |
) , |
уточняються |
геоцентричні |
координати |
фундаментальних |
0 |
|
|
|
|
|
геодезичних обсерваторій і контролюються їх взаємні зміщення обумовлені тектонічними рухами. Фундаментальні обсерваторії, як правило виконують комплекс VLBI, SLR та ГНСС-спостережень, а деякі оснащені апаратурою для LLR. З 1991 року умовна земна система координат узагальнена під назвою International Terrestrial Reference System (ITRS), що включає теоретичні положення та практичні реалізації загально земної системи координат
International Terrestrial Reference Frame (ITRF), Служба ITRS використовує для дослідження обертового руху Землі результати вимірів виконаних на геодезичних обсерваторіях усього світу. У рамках Європейського континенту існує аналогічна служба European Terrestrial Reference System (ETRS) і
відповідно практичні реалізації земної системи координат European Terrestrial Reference Frame (ETRF), які використовують результати спостережень геодезичних обсерваторій розташованих виключно у Європі. У зв’язку із безперервним зростанням кількості геодезичних обсерваторій і результатів спостережень та динамічними процесами, які відбуваються у земній корі,
виникає постійна необхідність удосконалення систем координат ITRF. Кожна наступна система координат, є більш удосконаленою, оскільки використовує більш тривалий обсяг спостережень виконаний на більшій кількості станцій з використанням остаточних результатів отриманих у різних центрах опрацювання вимірів.
Носіями систем координат ITRF є геодезичні обсерваторії, зокрема перманентні ГНСС-станції. Трансформація координат із однієї ITRF –
5

реалізації у іншу проводиться із використанням перетворень Гельмерта
|
X xx |
|
|
X yy |
|
x |
|
1 + m |
− |
|
|
X yy |
|
|
|
|
|
|
|
|
|
|
|||||||
|
Yxx |
|
= |
Yyy |
+ |
y |
+ |
|
1 + m |
− |
|
Yyy |
, |
(2) |
|
Zxx |
|
|
Z yy |
|
z |
|
− |
|
1 + m |
|
Z yy |
|
|
де: X xx ,Yxx , Z xx , X yy ,Yyy , Z yy |
– координати пункту у системах координат ITRF-XX i |
|||||||||||||
ITRF-YY, x , y , z |
– координати початку системи ITRF-YY у системі ITRF-XX, |
|||||||||||||
, , – кути між відповідними осями систем координат ITRF-XX i ITRF-YY,
m – масштабний множник.
Необхідність прив’язки системи координат на певну епоху обмовлено зміною координат пунктів викликаних рухом континентальних плит (рис. 4).
Рис. 4. Вектори зміщень пунктів за моделями кінематики тектонічних плит
APKIM-2000 та NNR NUVEL-1A
Довжини векторів швидкостей зміщень у різних регіонах коливаються у межах 1-8 см/рік. Практично весь європейський континент рухається у північно-східному напрямку з швидкістю 2-2,5 см/рік (див. рис. 4). Вектори зміщень представлені за моделями кінематики тектонічних плит APKIM-2000
та NNR NUVEL-1A. Модель NNR NUVEL-1A побудована за результатами геодезичних (GPS, VLBI, SLR) та геофізичних вимірів, а APKIM-2000 за
6
результатами тільки геодезичних вимірів. Однак розбіжності між векторами зміщень у більшості регіонів світу є незначні.
Для редукування параметрів трансформації на необхідну епоху T
використовують наступні вирази:
x (T )= x (t0 ) + x (T −t0 ) ,
y (T )= y (t0 ) + y (T − t0 ) ,
z (T )= z (t0 ) + z (T −t0 ) ,
m(T )= m(t0 ) + m (T −t0 ) , |
(3) |
(T )= (t0 ) + (T −t0 ) , |
|
(T )= (t0 ) + (T −t0 ) ,(T )= (t0 ) + (T −t0 ) .
Рух континентальних тектонічних плит та прояв регіональних
геодинамічних явищ вимагає редукування координат пунктів.
XYY (T ) = XYY (t) +VXYY (T −t) ,
YYY (T ) = YYY (t) +VYYY (T −t) , |
(4) |
ZYY (T ) = ZYY (t) +VZYY (T −t) ,
де: XYY (t) ,YYY (t) , ZYY (t) ,VXYY ,VYYY ,VZYY – координати та швидкості зміщень пунктів у системі координат ITRF-YY на епоху t . Координати геодезичних обсерваторій, перманентних ГНСС-станцій надаються різними центрами опрацювання вимірів.
2.СИСТЕМИ ЧАСУ
Розглянемо три основні системи виміру часу. Це зоряний час, динамічний і атомний час.
Зоряний час визначається годинним кутом повороту Землі відносно точки весняного рівнодення. Якщо годинний кут повороту вимірюється відносно Гринвіцького меридіана, то цей час називається Гринвіцьким зоряним часом.
Всесвітнім часом (UT – Universal Time) є гринвіцький годинний кут умовного Сонця, яке рівномірно переміщується по екватору. Оскільки полюси Землі рухаються, кутова швидкість її обертання не є постійною то час UT не є
7