

Усі лекції
.pdf1.1.Космічний сегмент
Космічний сегмент являє собою сузір'я супутників, які рухаються по навколоземних орбітах. Для забезпечення можливості одночасних спосте-
режень не менше 4-х супутників в будь-якій точці Земної кулі необхідно, щоб загальна кількість супутників у сузір'ї становила неменше 24. Для мінімізації впливу геометрії розташування видимих супутників на точність вимірювань кількість орбіт і місця розташування на них супутників повинні забезпечувати їх рівномірний розподіл на небосхилі (рис. 7). В результаті система GPS
використовує шість близьких до кругових орбіт, площини яких зміщені одна відносно одної на 60°. При цьому для кожної сусідньої орбітальної площини положення супутників зміщене приблизно на 40°. Система ГЛОНАСС використовує три орбітальні площини, рознесених на 120°, на яких розміщуються по 8 супутників, віддалених один від одного на 45°. Система
GALILEO скрадатиметься із 30 супутників (3 з яких будуть активними резервними). Вони будуть розміщені на висоті 23,616 км, забезпечуючи широку зону охоплення. Супутники будуть рівномірно розподілені на трьох орбітах, що мають кут в 56° до екватора і період 14 годин 5 хвилин.
GPS ГЛОГАСС
Рис. 7. Орбіти GPS та ГЛОНАСС
Супутники, які входять до складу систем позиціонування являють собою платформи, на яких встановлюється вся необхідна апаратура для забезпечення роботи навігаційної систем, а також для нормального функціонування кожного супутника як космічного об'єкта. Конструктивно супутник складається із
3
основного корпусу, всередині якого розміщується весь комплекс апаратури, і
двох досить великих за розмірами панелей з сонячними джерелами живлення.
Усередині корпусу крім основної радіотехнічної апаратури, що бере участь у вимірювальному процесі, є реактивний двигун з достатньою кількість палива для того, щоб була можливість коригувати орбітальне положення супутника протягом всього запланованого терміну служби. Для орієнтування супутника в навколишньому просторі передбачена інерційна система. Безперебійне електроживлення бортової апаратури здійснюється від сонячних джерел живлення і від працюючих в буферному режимі акумуляторних батарей. До складу допоміжного устаткування входить також радіоприймальний пристрій для прийому інформації, що передається із Землі сегментом управління і контролю. Основні параметри космічних сегментів систем GPS і ГЛОНАСС представлені у таблиці 1.
Таблиця 1.
Основні характеристики супутникових навігаційних систем GPS і
ГЛОНАСС
Показник |
GPS |
ГЛОНАСС |
|
|
|
|
|
Число космічної апаратури у повному |
24/3 |
24 /3 |
|
орбітальному угрупуванні |
|||
|
|
||
|
|
|
|
Число орбітальних площин |
6 |
3 |
|
|
|
|
|
Число космічної апаратури на кожній площині |
4 |
8 |
|
|
|
|
|
Нахил орбіти |
55.0° |
64.8° |
|
|
|
|
|
Висота орбіти, км |
20 180 |
19 130 |
|
|
|
|
|
Період обернення супутника |
11г. 58хв. 00с. |
11г. 15хв. 44с. |
|
|
|
|
|
Система координат |
WGS-84 |
ПЗ-90 |
|
|
|
|
|
Вага навігаційної космічної апаратури, кг |
1055 |
1450 |
|
|
|
|
|
Термін активного існування на орбіті, років |
7.5 |
3-10 |
|
|
|
|
|
Засоби виведення КА на орбіту |
Delta-2 |
«Протон- |
|
К/ДМ» |
|||
|
|
||
|
|
|
|
На початковій стадії розробки систем GPS і ГЛОНАСС планувались як |
|||
4
навігаційні системи військового призначення. Тому основну увагу було приділена формуванню кодових сигналів, за допомогою яких передбачалося реалізувати можливість оперативного визначення відстаней між супутниками і наземною апаратурою з точністю в десятки і сотні метрів. Під час проектування таких систем було визнано доцільним застосування двох видів закодованих сигналів. Для системи GPS ці сигнали отримали назву загальнодоступного грубого коду (С/А-коду) з роздільною здатністю в декілька десятків метрів і обмеженого точного коду (Р-коду) з роздільною здатністю приблизно в 10 разів вищою. В системі ГЛОНАСС такі кодові сигнали отримали назву вузько смугової і широко смугової псевдовипадкової послідовності (СТ-код і ВТ-код).
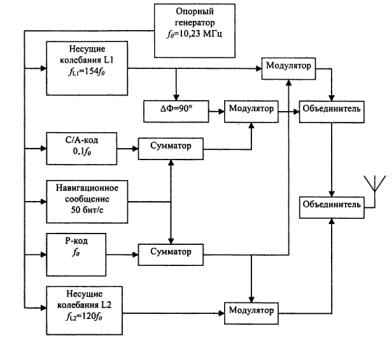
Передача з супутника обох сигналів здійснюється за допомогою модуляції несучих коливань дециметрового діапазону. Поряд із перерахованими функціями, розташована на супутнику апаратура повинна також передавати на Землю навігаційне повідомлення. Всі несучі та кодові сигнали, які формуються на супутнику, а також бінарні сигнали для передачі навігаційного повідомлення отримуються на основі використання встановлених на супутнику високо стабільних опорних генераторів. На заключній стадії сформовані сигнали об’єднуються і після відповідного підсилення випромінюються системою в напрямку земної поверхні.
Рис. 8. Структурна схема формування сингалу ГНСС
5

Основою даної функціональної схеми є високо стабільний опорний генератор, який називають також бортовим еталоном часу і частоти. Частота вироблена таким генератором коливань становить для GPS – 10,23 МГц, а для ГЛОНАСС – 5,11 МГц. На базі використання цього генератора формуються не тільки всі передані із супутника сигнали, але і реалізуються високоточні електронні годинники, покази яких використовуються в процесі виконання супутникових вимірювань, а також для передачі сигналів точного часу. В
системі GPS коливання несучих частот, які отримали умовні позначення L1 і L2, формуються за допомогою множення частоти опорного генератора відповідно на 154 і на 120. Отримані при цьому частоти  i
i
 відповідають дециметровому діапазону
відповідають дециметровому діапазону  i
i
 .
.
В системі ГЛОНАСС за допомогою відповідних синтезаторів частот для кожного супутника формується своя пара несучих частот, одна з яких відноситься до верхнього (L1), а інша – до нижнього (L2) діапазонів частот.
При цьому для верхнього і нижнього діапазонів несучі частоти, характерні для кожного супутника, визначаються за формулами:
,
(1)
 ,.
,.
де,  ,
,  ;
;  =1246,00 МГц;
=1246,00 МГц;
 , а
, а  – умовний порядковий номер пари несучих частот
– умовний порядковий номер пари несучих частот
 .
.
Несучі коливання в розглянутих системах використовуються не тільки в якості передавачів інформації з супутників в наземну апаратуру, але і є основними сигналами при виконанні фазових вимірювань, за допомогою яких вдається визначати відстані між супутником і наземним пунктом з характерною для геодезії високою точністю. Сформовані на супутнику кодові сигнали призначені, насамперед, для оперативного вимірювання відстаней на низькому рівні точності, достатньому для вирішення навігаційних завдань. Стосовно системи GPS ці сигнали використовуються для розпізнавання конкретного
6
номера супутника, захоплення його сигналу і утримання його протягом всього сеансу спостережень.
Чисельні значення характерних для кодових сигналів тактових частот,
одержуваних на основі використання частоти опорного генератора, в системі
GPS обрані наступними:  МГц та
МГц та  МГц. В
МГц. В
системі ГЛОНАСС тактові частоти для СТ-коду і ВТ-коду відповідно:
 МГц та
МГц та  МГц. Інформація, що міститься в навігаційному повідомленні, передається на більш низькій частоті (
МГц. Інформація, що міститься в навігаційному повідомленні, передається на більш низькій частоті ( 50 біт/с), при формуванні якої також використовуються коливання опорного генератора.
50 біт/с), при формуванні якої також використовуються коливання опорного генератора.
Поступленні з виходів кодуючих пристроїв кодові послідовності (сигнали С/А-коду і Р-коду) сумуються з сигналами навігаційного повідомлення, після чого вони надходять в модулятори (перемножувачі), де здійснюється фазова модуляція несучих коливань L1 і L2. При цьому коливання L1 піддаються модуляції кодовими сигналами як С/А-коду, так і Р-коду, в той час як коливання L2 модулюються тільки сигналами Р-коду з накладеним на них навігаційним повідомленням. Для полегшення поділу на приймачі кодових сигналів (С/А і Р-коду), переданих на частоті L1, несучі коливання для передачі С/А-коду, додатково зсуваються по фазі на 90 градусів, що дозволяє реалізувати в апаратурі користувача так званий квадратурний принцип поділу прийнятих сигналів. Після формування на супутнику фазомодульованих сигналів несучої частоти останні об'єднуються за допомогою відповідних електронних вузлів в один комплексний сигнал, який випромінюється супутниковою антеною системою.
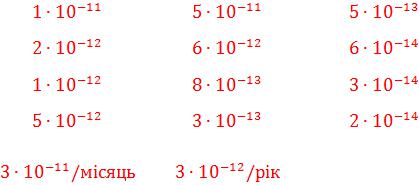
В системах GPS і ГЛОНАСС застосовуються найбільш стабільні атомні і молекулярні генератори. До них відносяться рубідієві і цезієві атомні генератори, а також водневі молекулярні генератори (мазери). У табл. 2
наведені деякі кількісні показники, що характеризують властиву цим генераторам відносну нестабільність частоти для різних часових інтервалів.
7
Таблиця 2.
Основні характеристики нестабільності частоти для різних типів
генераторів систем GPS і ГЛОНАСС
Характеристика |
|
Тип генератора |
|
|
|
|
|
||
Рубідієвий |
Цезієвий |
Водневий |
||
|
||||
|
|
|
|
|
Маса, кг |
2 |
10 |
30 |
|
|
|
|
|
|
Енергоспоживання, |
10 |
20 |
30 |
|
Вт |
||||
|
|
|
||
|
|
|
|
|
Об’єм, куб. дм. |
1 |
10 |
30 |
|
|
|
|
|
|
|
Відносна нестабільність частоти за: |
|
||
|
|
|
|
|
1 с. |
|
|
|
|
|
|
|
|
|
1 хв. |
|
|
|
|
|
|
|
|
|
1 год. |
|
|
|
|
|
|
|
|
|
1 доба |
|
|
|
|
|
|
|
|
|
Систематичний |
|
|
Не виявлено |
|
дрейф |
|
|
||
|
|
|
||
|
|
|
|
|
Причини зниження |
Погіршення |
Шуми у |
Обмежений |
|
стабільності |
якості лампи |
променевій трубці |
запас водню |
|
|
|
|
|
|
З табл. 2. випливає, що найбільша стабільність частоти характерна для водневих мазерів. Що стосується двох інших типів атомних генераторів, то цезієві генератори в порівнянні з рубідієвими забезпечують більш високу довготривалу стабільність, у той час як для рубідієвих генераторів властива найбільш висока короткочасна стабільність. Для підвищення надійності та стабільності роботи на супутниках встановлюють декілька одночасно працюючих опорних генераторів. Так, в системі GPS на супутниках Блок-II
знаходяться два цезієвих і два рубідієвих генератора. На супутниках Блок-II R -
більш стабільні водневі мазери. Оскільки на супутниках опорні генератори виконують роль бортових еталонів не тільки частоти, але і часу, то в спеціалізованій літературі такі генератори часто називають годинниками.
8
1.ГЛОБАЛЬНІ НАВІГАЦІЙНІ СУПУТНИКОВІ СИСТЕМИ
1.1.Сегмент управління та контролю
Для підтримки постійної працездатності всього космічного сегменту, а
також для систематичного оновлення переданої користувачам інформації, яка потребує періодичної корекції, в сучасних глобальних супутникових системах позиціонування (таких як GPS і ГЛОНАСС) передбачається спеціальний постійно діючий сегмент, який отримав назву сегмент управління і контролю
(або наземний комплекс управління). Даний сегмент повинен виконувати наступні функції:
•безперервне відстеження всієї переданої супутниками інформації;
•узагальнення та аналіз інформації з метою своєчасного коригування всіх показників;
•прогнозування ефемерид супутників та переданого із супутників користувачам точного часу;
•формування оновлених навігаційних повідомлень і передавання їх по радіоканалу на відповідні супутники (в строго визначені інтервали часу);
•виявлення несправностей в роботі супутників і вживання заходів щодо їх усунення;
•коригування орбіт супутників не тільки за рахунок введення відповідних поправок, але і за допомогою дистанційного управління реактивним двигуном, що знаходяться на борту супутника.
Серед різних контрольованих і коректованих параметрів підвищена увага приділяється періодичному уточненню ефемерид і показів годинників супутників. Визначення поточних значень ефемерид певних супутників, які використовуються при обчисленні відповідних правок в прогнозі їх значень,
здійснюється методом просторової лінійної засічки. При цьому виконується одночасне вимірювання відстаней до конкретного супутника мінімум із трьох пунктів земної поверхні, координати яких добре відомі. Коригування показів
1

годинників супутників здійснюється за допомогою порівняння прийнятих по радіоканалу відліків часу по цьому годиннику з відповідними показами наземних опорних годинників, що входять до складу сегменту управління і контролю. Поряд із зазначеними показниками даним сегментом постійно контролюються і коригуються поправки, зумовлені впливом атмосфери.
Реалізація перерахованих функцій сегменту управління та контролю базується на чіткій взаємодії станцій різного призначення, які входять у цей сегмент. Це зокрема головна станція, станції стеження та завантажувальні станції. Мережа станцій сегменту управління і контролю системи GPS
складається з однієї головної станції управління, п'яти станцій стеження і трьох завантажувальних станцій (рис. 9).
Рис. 9. Мережа станцій управління та контролю системи GPS
П'ять станцій стеження, які часто називають моніторинговими станціями, здійснюють цілодобові відстеження супутників. Вони рівномірно розташовані по всій земній кулі, на островах Вознесіння і Гаваї, на атолах Кваджалейн і Дієго-Гарсія. Одна із станцій поєднана з головною станцією, що знаходиться в Колорадо-Спрінгс (США). Відстеження супутникових сигналів здійснюється за допомогою двочастотних спеціалізованих приймачів,
обладнаних атомними (цезієвими) годинниками. Координати цих станцій відомі з високою точністю. Розглянуті станції стеження працюють повністю в автоматичному режимі, а їх управління здійснюється з головної станції.
2
За допомогою даних станцій виконують вимірювання відстаней до всіх супутників, які знаходиться в полі зору, приймають зі супутників навігаційні повідомлення на частотах L1 і L2, в результаті чого є можливість визначати поточні поправки, зумовлені впливом іоносфери. Крім того, реєструється точність ходу супутникових годинників. Поряд з цим в місцях розташування станцій стеження збирають і ретранслюють на головну станцію метеорологічні дані, що відносяться до умов даної місцевості. До таких даних відносяться температура, тиск і вологість повітря, таким чином тропосферні затримки переданих з супутників сигналів можуть бути визначені і відкориговані.
Визначення відстаней до супутників проводиться на основі використання кодових сигналів. При цьому псевдовіддалі на станціях стеження вимірюються з точністю близько 2,5 м кожні півтори секунди. На основі таких вимірювань уточняються поточні значення ефемерид супутників і здійснюється їх прогноз на найближчий час.
Головна станція управління, що знаходиться в Колорадо-Спрінгс
(США), є робочим центром всієї системи GPS. Операції управління цілком закріплені за цією станцією. Вона безперервно збирає інформацію від всіх перерахованих вище станцій стеження, використовується для обчислення прогнозованих орбіт як функцій часу, а також для визначення поправок до показів годинників супутників. Поряд з цим здійснюється формування навігаційного повідомлення з параметрами орбіти для індивідуального супутника і з поправками до показів його годинника, а також альманаха, який включає в себе коротку інформацію про всі супутники. Три рази на добу навігаційне повідомлення передається на супутники за допомогою завантажувальних станцій.
Головна станція безперервно оперує великою кількістю параметрів системи, найважливішими з яких є поточні координати супутників і сигнали точного часу. Високоточні годинники головної станції виконують роль опорних годинників для всієї системи GPS. Ці годинники встановлюють часовий масштаб GPS і безпосередньо пов'язані з національним стандартом часу США.
3
Всі інші годинники порівнюються з опорними годинниками, в результаті чого здійснюється синхронізація всіх годинників GPS.
Через станції завантаження головна станція може коригувати орбіти супутників, як за рахунок введення відповідних поправок, так і за допомогою управління реактивним двигуном, що знаходиться на борту супутника. Крім того, дана станція може керувати режимом роботи активних резервних супутників, переводячи їх в робочий режим.
Три наземні завантажувальні станції розташовані на атолах Дієго-Гарсіа та Кваджалейн, а також на острові Вознесіння. Антенні пристрої цих станцій являють собою великі параболічні дзеркальні антени діаметром близько 10 м.
Вони використовуються для передачі навігаційних повідомлень, а також команд управління на супутники. Передача здійснюється на частоті
1783,74МГц. Для прийому цих сигналів на супутнику у складі супутникового апаратного комплексу передбачено відповідний приймальний пристрій,
інформація з виходу якого надходить в модуль пам'яті. Для забезпечення безперебійної роботи сегменту управління та контролю всі основні складові частини системи продубльовано.
Прийнята кожною з п'яти станцій стеження від доступних супутників інформація доповнюється необхідною інформацією, а потім передається в он-
лайн режимі по спеціальному каналу зв'язку на головну станцію. Отримана після відповідної обробки інформація у вигляді обновленого навігаційного повідомлення та інших службових команд надходить по каналу зв'язку на завантажувальні станції, які передають згадану інформацію на той супутник,
для якого призначена ця інформація. Також на головній станції формується банк даних, що містить обчислені значення ефемерид, точність яких значно вища за точність, яка передається у навігаційному повідомленні. За запитом такі уточнені значення ефемериди поставляються користувачам, зацікавленим в отриманні результатів супутникових геодезичних вимірювань підвищеної точності.
Структура організації наземного комплексу управління (НКУ), що входить
4