

Розділ 2
Розділ 2 абсолютні вимірювання прискорення сили ваги
Прискорення сили ваги вперше визначив Г а лі лей, вимірюючи шлях падаючого тіла за першу секунду. В XVII і XVIII століттях зусиллями багатьох учених була розроблена методика маятникових визначень прискорення сили ваги. Але точно виміряти g в абсолютних одиницях у будь-якому пункті земної поверхні-операція, яка вимагає дуже великої ретельності. Такі вимірювання названі абсолютними в тому розумінні, що вони не залежать від результатів вимірювань сили ваги в інших пунктах, Отже, теоретично досгатньо виконати абсолютні вимірювання лише в одному пункті, щоб від нього перейти до величини сили ваги інших пунктів, використовуючи відносні визначення. Абсолютне значення прискорення сили ваги необхідно знати при встановленні фізичних одиниць і створенні різних стандартів; для приведення в єдину абсолютну систему всіх гравіметричних вимірів на земній поверхні; для отримання параметрів формули нормального значення сили ваги; для вивчення припливних і неприпливних змін сили ваги; для визначення маси Землі в метричних одиницях тощо. Як раніше відзначалося, для виконання абсолютних вимірювань використовують лише динамічний метод, але в даний час виконують спостереження тільки балістичними і рідко - маятниковими методами. Тому в цьому розділі дуже коротко зупинимося на маятниковому методі абсолютних визначень, але дещо детальніше на балістичних методах. Спочатку розглянемо теорію фізичного маятника, яка нам буде необхідна при розгляді як абсолютних, так і відносних маятникових визначень.
2.1 Теорія коливання фізичного маятника
Фізичним маятником називають тверде тіло, яке може здійснювати вільні коливання відносно горизонтальної осі під дією прикладених сил. На рух такого тіла, крім прискорення сили ваги, впливають фактори негравітаційного походження, Це перш за все деформації маятника і його підставки, згасання коливань, опір повітря та інші атмосферні впливи. Період коливання фізичного маятника одержують із диференціального рівняння його руху. Але при цьому розглядають ідеальний маятник (фізичний або математичний), період коливання якого можна простіше виразити у функції прискорення сили ваги і амплітуди, а додаткові зовнішні впливи врахувати поправками до виміряного періоду. Для того, щоб ці поправки були мінімальними, маятник повинен бути виготовленим із максимально стійкого матеріалу, ізольованого від впливу зовнішнього середовиша.
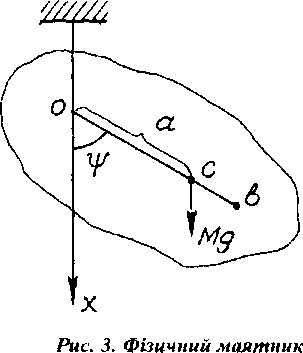
На рисунку 3 схематично представлена модель фізичного маятника, рух якого навколо точки О відбувається в площині рисунка. Центр ваги знаходиться в точці С, а відстань від осі обертання до центру ваги позначимо через а. Кут відхилення тіла від положення рівноваги позначимо через Ψ
З механіки відомо, що диференціальне рівняння руху твердого тіла, яке обертається навколо нерухомої горизонтальної осі, можна записати в вигляді
![]()
або
 (2.2)
(2.2)
де:
І - момент інерції маятника відносно осі обертання,
 -
кутове
прискорення тіла,
-
кутове
прискорення тіла,
М - маса маятника,
g - прискорення сили ваги.
В цій формулі знак мінус означає, що момент сили ваги Мх відносно осі обертання намагається зменшити кут Ψ. Тоді рівняння руху тіла набуде вигляду-
де:
(2.5)
(2.6)
а далі
(2.8)
 (2.4)
(2.4)
Тут під l розуміють зведену довжину фізичного маятника, яка залежить від розподілу маси маятника і положення осі обертання. Помножимо обидві частини
(2.3)
на 2
 і
проінтегруємо. Тоді одержимо
і
проінтегруємо. Тоді одержимо
Сталу інтегрування С визначимо за початковими умовами руху маятника. На початку руху при t=0 маятник відхилився на максимальний кут α від положення
рівноваги, а швидкість дорівнює нулю, тобто Ψ=α, при t=0.
Підставимо початкові умови в рівняння (2.5.) і знайдемо:
 ,
,

(2.7)
Це рівняння має фізичний зміст, якщо права частина є додатня або дорівнює нулю, тобто

Це можливо, якщо Ψ набирає значень у межах від + а до - а . Час, необхідний маятнику для проходження від одного крайнього положення (+а ) до іншого крайнього положення (-а), називається періодом коливання маятника Т. Максимальне відхилення маятника від положення рівноваги, що відповідає куту «. називається амплітудою коливання. Інтегруючи праву частину виразу (2.7) в межах від а до - а, будемо мати
Виразимо косинуси кутів через синуси половинних кутів за формулою
і
інтервалі
візьмемо до уваги, що підінтегральна функція не змінює своєї величини на від -а до 0 і в інтервалі від 0 до а Тоді

(2. 9)
Введемо нову змінну інтегрування
звідки
Для змінної ер одержимо нові межі інтегрування При Ψ=0, φ=0,а при
Ψ=а,
 Після
нескладних перетворень знайдемо
Після
нескладних перетворень знайдемо
де
(2.10)
(2.11)
(2.12)
(2.13)
 ,
,

Для обчислення еліптичного інтеграла (2.13), використаємо розклад підінтегральної функції в ряд

Підставимоjjцей розклад в (2.13) і проінтегруємо:
або
 (2.14)
(2.14)
Перший головний член цього рівняння залежить від прискорення сили ваги і розподілу маси маятника, а всі інші враховують вплив амплітуди на період коливання При вимірюваннях сили ваги амплітуда коливань складає (30-40)' і не перевищує 1° Величини поправок, які враховують вплив амплітуди на період коливання, наведені в таблиці 1.
Таблиця 1
|
α |
- а |
a |
|
|
1/4 sin2 — |
9/64 sіn4 — |
|
|
2 |
2 |
0° |
15' |
119 х 10-8 |
3 х 10-13 |
0° |
30' |
476 х 10-8 |
5 х 10 12 |
1° |
00' |
1903 х 10-8 |
8 х 10-10 |
5° |
00' |
47565х 10-8 |
51 х 10-8 |
Для практичних цілей обмежуються першим членом поправки, якщо відносна похибка періоду коливання 1*10'8. Тоді
 (2.15)
(2.15)
збігається з диференціальним рівнянням руху математичного
Вираз для
маятника. Це означає, що фізичний маятник коливається за таким же законом, як і
математичний, але роль довжини математичного маятника £ відіграє зведена довжина