

Зрівноваження системи поліґонометричних ходів з однією вузловою точкою / Методичні вказівки до лабораторної роботи
.pdfМІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ “ЛЬВІВСЬКА ПОЛІТЕХНІКА”
УРІВНОВАЖЕННЯ МЕРЕЖІ ПОЛІГОНОМЕТРИЧНИХ ХОДІВ З ОДНІЄЮ ВУЗЛОВОЮ ТОЧКОЮ
МЕТОДИЧНІ ВКАЗІВКИ
до розрахункової роботи з геодезії для студентів II курсу спеціальності 193
“Геодезія та землеустрій”
Затверджено на засіданні кафедри геодезії.
Протокол № 3(6) від 06.04.2017 р.
Львів – 2017

Урівноваження мережі полігонометричних ходів з однією вузловою точкою : метод. вказівки до розрахункової роботи з геодезії для студентів II курсу спеціальності 193 “Геодезія та землеустрій” / уклад.: І. С. Тревого, І. С. Сідоров, І. Ф. Гарасимчук. – Львів : Видавництво Львівської політехніки, 2017. – 28 с.
Укладачі |
Тревого І. С., д-р техн. наук, проф., |
|
|
Сідоров І. С., ст. викл., |
|
|
|
|
|
Гарасимчук І. Ф |
., канд. техн. наук, доц. |
Відповідальний за випуск Перій С. С., канд. техн. наук, доц.
Рецензент |
Костецька Я. М., д-р техн. наук, проф. |
Метою врівноваження результатів спостережень у полігонометричних ходах і мережах є оптимальний розподіл нев’язок, що виникли через дію похибок лінійних і кутових вимірювань. Для цього у виміряні величини необхідно ввести поправки, які деякою мірою замінять частини похибки проведених вимірювань. Для полігонометричних мереж із вузловою точкою застосовують роздільне урівноваження, яке передбачає окреме врівноваження горизонтальних кутів, а далі, за їхніми значеннями та виміряними довжинами ліній, обчислюють та врівноважують прирости абсцис і ординат.
У методичних вказівках наведено послідовність обчислень та оцінки точності кутових і лінійних вимірювань. Вважається, що студенти вже ознайомлені з теоретичними основами врівноваження. Наведені схеми полігонометричних мереж з трьох ходів, що сходяться у вузлову точку. На схемі вписано горизонтальні кути і горизонтальні проекції виміряних ліній. Ці дані однакові для усіх варіантів завдань для конкретної студентської групи. Потім кожний студент вибирає із додатка 2 “Варіанти вихідних даних” для своєї групи і свого варіанта індивідуальні значення координат Х, У початкових вихідних пунктів Б, Е, Г полігонометричних ходів, а також вихідні дирекційні кути αі напрямків А–Б, Д–Е та В–Г.
Для візуалізації обчислень та кращого розуміння процесу врівноваження у методичних вказівках наведено приклад послідовного врівноваження полігонометричної мережі із вузловою точкою без застосування програмного забезпечення. Завершивши обчислення, студент оформляє і друкує результати за вимогами методичних вказівок на аркушах паперу (формату А4) у такій послідовності:
–титульна сторінка з назвою роботи, номером варіанта, прізвищем студента (див. додаток 1);
–схема полігонометричної мережі з кутами і лініями та таблиця індивідуальних вихідних даних (див. додаток 2);
–такі обчислення й відомості за встановленими зразками:
|
обчислення дирекційних кутів вузлової лінії 10–17 по ходах I, II, III та |
||||
відомість 1 урівноваження дирекційного кута |
вр |
|
(див. додаток 3); |
||
|
|
||||
|
|
10 17 |
|
||
|
обчислення координати Х пункту 10 ходів I, II, III та відомість 2 |
||||
урівноваження координати Х вузлової точки 10 – X10вр (див. додаток 4); |
|||||
|
обчислення координати Y пункту 10 ходів I, II, III та відомість 3 |
||||
урівноваження ординати вузлової точки 10 – |
вр |
(див. додаток 5); |
|||
|
|
||||
|
10 |
|
|
||

ПОСЛІДОВНІСТЬ ОБЧИСЛЕНЬ
1.Зі схеми мережі (додаток 2) у колонки 1, 2, 5 (відомості 4, 5, 6, додатки 6, 7, 8) студенти вписують номери вершин ходів, виміряні горизонтальні кути та горизонтальні проекції ліній. З таблиці вихідних даних (додаток 2) за індивідуальним варіантом студенти вписують у відповідні колонки відомостей координат вихідні дані, червоним кольором дирекційні кути α напрямків А–Б, В–Г, Д–Е та координати Х, У точок Б, Г, Е (зворотний дирекційний кут напрямку відрізняється від прямого на ±180о).
2.Додаючи виміряні кути кожного ходу, знаходять практичну суму кутів
ходів β i. пр , аналогічно визначають периметри [S] ходів.
3. Обчислюють дирекційний кут вузлової точки α10-17 для кожного полігонометричного ходу за формулами:
Хід I (кути праві)
Хід II (кути праві)
Хід III (кути ліві)
α10-17 = αАБ + 180˚(nI+1) – β І
α10-17 = αВГ + 180˚(nII+1) – β α10-17 = αДE – 180˚(nIII+1) + β
. пр ;
ІІ . пр ;
ІІІ . пр .
(1)
де nІ + 1, nІІ + 1, nІІІ + 1 – кількість виміряних горизонтальних кутів у ходах.
4. Далі обчислюють середньовагове значення дирекційного кута |
вр |
|
|
10 17 |
|
точністю до 0,1″ сторони за формулою:
з
вр |
1 і , |
|
10 17 |
і |
|
|
|
|
де i – вага і-го ходу, обчислена за формулою i |
i |
|
P |
P |
c/n |
і-му ході.
Можна скористатися спрощеною формулою:
|
вр |
|
|
|
і |
|
|
||
|
min |
|
|
і |
, |
||||
10 |
17 |
|
|||||||
|
|
|
|
||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
і |
|
|
(2)
, с = 10, nі – кількість ліній у
(3)
де min – найменша величина дирекційного кута сторони 10–17, обчислена за формулами (1); і – різниці між обчисленими за формулами (1) значеннями
дирекційного кута лінії 10–17 та min . |
Обчислення виконувати у відомості 1 |
|||
(додаток 3). |
|
|
|
|
Значення дирекційного кута |
вр |
|
вписують у графу 4 відомостей |
|
|
|
|||
10 17 |
|
|
||
координат у рядок між пунктами 10 і 17. |
|
|
||
Відтак розраховують похибку |
обчислення дирекційного кута. Оцінюють |
|||
точність визначення дирекційного кута |
|
вр |
|
за формулою: |
|
|
|||
|
10 17 |
|
||
|
|
|
P |
2 |
|
||
M |
|
|
|
i |
i |
|
|
a |
P |
k |
i |
||||
|
|
||||||
|
|
|
|||||
|
|
|
i |
|
|
|
|
,
(4)
де |
к – кількість ходів у мережі, |
vi i |
вр |
– відхилення обчислених |
||||||||||||
|
|
|||||||||||||||
|
|
|
|
|
|
|
10 17 |
|
|
|
|
|
|
|
||
дирекційних кутів лінії 10–17 від врівноваженого значення. |
|
|
|
|
|
|
||||||||||
5. Обчислюють кутові нев’язки ходів f |
і |
|
із точністю до 0,1" за форму- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лами |
f |
пр |
вр |
і і (для правих кутів) та |
f іпр і |
вр |
|
і (для |
||||||||
10 |
17 |
|
|
|||||||||||||
|
i |
|
|
|
|
|
|
|
10 17 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лівих кутів) та |
допустимі кутові |
нев’язки за |
формулою |
f β |
|
5 |
|
n 1 . |
||||||||
|
|
|
|
|
|
|
|
|
|
|
і.доп |
|
|
|
і |
|
Результати вписують у відомість обчислення координат ходів (див. додат-
ки 6–8).
6. Виконують розподіл нев’язок |
f |
i |
з оберненим знаком у виміряні кути в |
|
|
|
кожному ході, обчислюючи та вводячи поправки, визначені за формулою
|
β |
|
f βі nі
,
(5)
Контроль: δβі f βі. .
Поправки вписують червоним кольором над виміряними кутами
вграфу 2 у відомостях 4, 5, 6 (додатки 6–8).
7.За виміряними кутами з точністю до 0,1" обчислюють дирекційні кути всіх сторін ходів, починаючи з вихідних напрямків за формулами (6), та
вписують у графу 4 відомостей 4, 5, 6 обчислення координат (додатки 6–8)

Хід I (кути праві)
α |
|
|
|
α |
|
|
180 |
о |
β |
Б |
||||
Б 1 |
А Б |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
α |
|
|
|
α |
|
|
180 |
о |
β |
|
||||
|
|
Б 1 |
|
|
|
|||||||||
1 2 |
|
|
|
|
|
|
|
|
1 |
|
||||
......................................... |
||||||||||||||
|
10 |
17 |
|
9 |
10 |
180о |
||||||||
|
|
|
|
|
|
|
|
|
10 |
|||||
|
вр |
||
10 |
17 |
||
|
|||
;
Хід ІI (кути праві)
Хід ІІI (кути ліві)
α |
|
|
α |
|
|
|
|
180 |
о |
β |
Г |
|||||
Г |
16 |
В Г |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
α |
|
|
α |
|
|
|
|
180 |
о |
β |
|
|||||
|
15 |
Г 16 |
|
|
|
|||||||||||
16 |
|
|
|
|
|
|
|
|
|
16 |
||||||
......................................... |
||||||||||||||||
|
10 17 |
|
11 10 |
180о |
||||||||||||
|
|
|
|
|
|
|
|
|
|
10 |
||||||
α |
|
|
α |
|
|
|
|
|
180 |
о |
β |
E |
||||
Е 24 |
Д E |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
α |
|
|
|
α |
|
|
|
180 |
о |
β |
|
|||||
24 23 |
|
E 24 |
|
24 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
........................................ |
||||||||||||||||
|
17 10 |
|
18 17 |
180о |
||||||||||||
|
|
|
|
|
|
|
|
|
|
17 |
||||||
|
вр |
|
|
10 17 |
; |
||
|
|||
|
|
.
|
вр |
180 |
о |
. |
|
10 |
17 |
|
|||
|
|
|
|
||
(6)
8. За величинами
прирости координат |
X |
|
|
геодезичної задачі: |
|
дирекційних кутів та довжин
та |
|
з точністю до 0,001 м за |
|
ліній обчислюють формулами прямої
Х S cos ,
У
S sin
,
(7)
та вписують їх значення у графи 6, 7 відомостей координат 4, 5, 6.
9.Далі одержуємо суми приростів координат ΣΔХі, ΣΔУі для кожного ходу і вписуємо під відповідними графами у відомостях 4, 5, 6 обчислення координат.
10.Використовуючи прирости координат і координати вихідних пунктів, обчислюємо координати Х і Y пункту 10 для кожного ходу за формулами
Хід I
Хід ІІ
Хід ІІІ
X |
10 |
|
|||
I |
|
= ХБ + ΣΔХІ, |
|||
|
|
|
|||
|
|
|
|
||
X |
10 |
|
|
||
II |
= ХГ + ΣΔХІІ , |
||||
|
|||||
|
|
|
|||
X10 |
|
||||
|
|
III = ХЕ + ΣΔХІІІ, |
|||
У |
10 |
|
|
||
I |
= УБ + ΣΔУІ, |
||||
|
|||||
|
|
|
|||
У |
10 |
|
|||
II |
|
= УГ + ΣΔУІІ, |
|||
|
|
|
|||
|
|
|
|
||
У10 |
|
|
|||
|
III = УЕ + ΣΔУІІІ. |
||||
(8)
11. Обчислюємо середньовагове значення абсциси формулою
|
вр |
|
10 |
||
|
пункту 10 за
X |
вр |
|
|
||
10 |
|
|
Σ( X |
|
10 |
і |
|
|
ΣP |
|
|
і |
P |
) |
і |
|
,
(9)
де Рі – вага і-го ходу, обчислена за формулою Pі c/[S]і ; с – стала величина,
яку для зручності приймають с = 10; [S]і – периметр і-го ходу, км. Для зручності обчислень формулу (9) перепишемо у вигляді
|
вр |
|
|
|
|
Р |
|
|
|
10(min) |
|
і |
і |
|
|
10 |
Р |
|
|||||
|
|
|
|
||||
|
|
|
|
|
|||
|
|
|
|
|
|
і |
|
,
(10)
де
Х |
10 |
|
min |
||
|
– найменше значення Х10 до всіх ходів, величину
і
знаходимо за
формулою
|
|
10 |
10і |
10 min
.
Обчислення виконується у відомості 2 (додатку).
Точність урівноваження характеризується похибкою МХ, яку знаходять за формулою
M |
X |
|
|
|
де k – кількість ходів у мережі а
|
P v |
2 |
|
|
|
i |
i |
|
|
|
P |
k 1 |
||
|
s |
|
|
|
v |
X |
10 |
|
|
i |
|
|
||
|
|
|
і |
|
,
X |
10 |
|
|
|
вр |
(11)
– відхилення обчислених
абсцис пункту 10 від його врівноваженого значення.
12. Обчислюють лінійні нев’язки ходів Хі по осі Х за формулою
f |
Х і |
Х |
10 |
і |
вр |
|
|
|
|
10 |
|||
13. В обчислені прирости координат |
X |
|||||
. (12)
пропорційно до довжин ліній
вводимо поправки X |
і |
за формулою |
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
Х |
|
|
X |
i |
Si , |
|
(13) |
||
|
|
|
|
|
і |
S |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
де і – номер сторони та приросту координат і-го ходу. |
|
|||||||||||||
Контроль: Х |
і |
f X |
i |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Поправки X |
і |
обчислюють до 0,001 м і виписують червоним кольором |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
над відповідними |
X |
і |
приростами координат. |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Виправлені |
поправками прирости |
|
вр |
виписують у |
колонку 8 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
і |
|
|
|
відомостей координат 4, 5, 6. |
|
|
|
|
|
|
|
|
||||||
14. За формулою |
X i 1 X i X |
вр |
|
|
знаходимо координати Х для всіх |
|||||||||
i,i 1 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
пунктів полігонометричних ходів із точністю до 0,001 м. |
|
|||||||||||||
Хід I |
|
|
|
|
Хід II |
|
|
|
|
Хід III |
|
|||
Х |
|
Х |
|
|
Х |
вр |
|||||
1 |
Б |
Б 1 |
|||||||||
|
|
|
|
|
|
|
|||||
Х |
|
Х |
|
|
|
Х |
вр |
||||
2 |
1 |
|
1 2 |
||||||||
|
|
|
|
|
|
||||||
............................ |
|||||||||||
Х |
вр |
|
Х |
|
|
|
Х |
вр |
|||
10 |
9 |
|
9 10 |
||||||||
|
|
|
|
|
|
|
|||||
Х |
|
Х |
|
|
|
Х |
вр |
||
16 |
Г |
Г 16 |
|||||||
|
|
|
|
||||||
Х |
|
Х |
|
|
|
Х |
вр |
||
15 |
16 |
16 15 |
|||||||
|
|
|
|
||||||
............................ |
|||||||||
Х |
вр |
Х |
|
|
Х |
вр |
|||
10 |
11 |
11 10 |
|||||||
|
|
|
|
|
|
||||
Х |
|
Х |
|
|
|
Х |
вр |
|
|
|||
24 |
E |
E 24 |
|
|||||||||
|
|
|
|
|
|
|||||||
Х |
|
Х |
|
|
|
|
Х |
вр |
|
|
||
23 |
24 |
|
24 23 |
|
||||||||
|
|
|
|
|
|
|||||||
............................ |
|
|
||||||||||
Х |
вр |
Х |
|
|
|
Х |
вр |
. |
||||
10 |
17 |
17 |
10 |
|||||||||
|
|
|
|
|
|
|
||||||
(14)
Урівноваження приростів У виконують |
аналогічно до врівноваження |
||
приростів Х. |
|
|
|
Обчислення врівноваженої ординати |
|
вр |
вузлової точки виконуємо у |
|
|||
|
10 |
|
|
відомості 3 (додаток 5).
15. Оцінку точності кожного ходу виконують за формулами:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
абс |
|
|
|
|
|
|
|
|||||
f |
абс |
|
f |
|
f |
, |
f |
відні |
|
|
і |
|
|
|
, |
доп. f |
|
|
|
. |
||||
x |
к |
y |
к |
|
|
[S] |
/ f |
відн |
25000 |
|||||||||||||||
|
|
|
|
|
|
|
|
[S] |
|
|
|
|
|
|
||||||||||
|
і |
|
|
|
|
|
|
|
|
|
|
і |
|
абс |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
і |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
і |
|
|
|
|
|
(15)
Цей метод врівноваження не є строгим, але істотно наближає врівноважені дирекційні кути та координати пунктів до їхніх істинних значень.
Додаток 1
Міністерство освіти і науки України Національний університет “Львівська політехніка”
Кафедра геодезії
УРІВНОВАЖЕННЯ МЕРЕЖІ ПОЛІГОНОМЕТРИЧНИХ ХОДІВ
З ОДНІЄЮ ВУЗЛОВОЮ ТОЧКОЮ
Варіант № ___
Виконав студент гр.
…………………………….
Викладач:
Львів – 201 р.
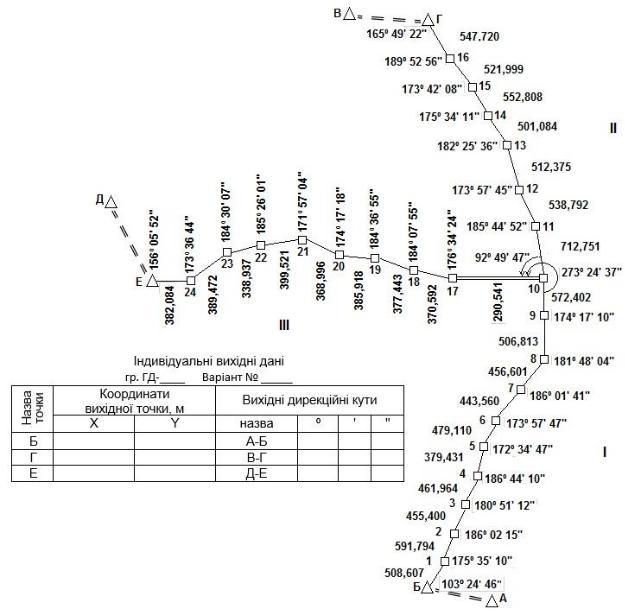
Додаток 2
СХЕМА ПОЛІГОНОМЕТРИЧНОЇ МЕРЕЖІ 4 КЛАСУ