

Условия равновесия пространственной системы сил в аналитической форме
Если при равновесии системы сил, приложенных к твердому телу, главный вектор равен нулю, то его проекция на каждую координатную ось также равна нулю. Это справедливо и для главного момента . Таким образом, из векторных условий равновесия пространственной системы сил следует шесть условий:
![]() . (40)
. (40)
Учитывая формулы (33) и (35), эти шесть условий через силы системы выражают в форме:
 . (41)
. (41)
Таким образом, для равновесия пространственной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы три суммы проекций всех сил на оси декартовых координат были равны нулю и три суммы моментов всех сил относительно трех осей координат также были равны нулю.
Из общих условий равновесия для произвольной пространственной системы сил получаются условия равновесия для частных систем сил, приложенных к твердому телу.
Условия равновесия пространственной системы параллельных сил
Н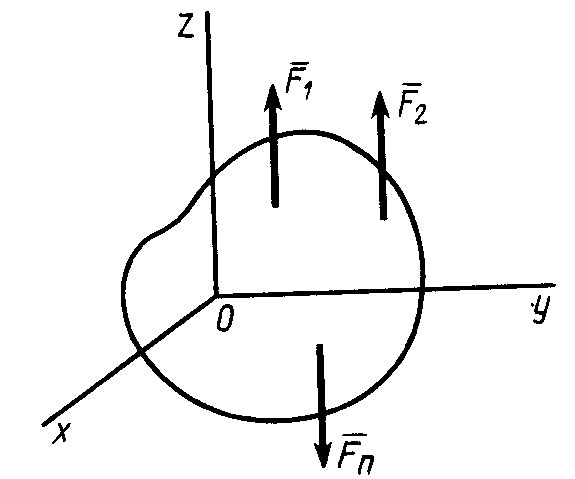 аправим
ось Оz
параллельно силам
аправим
ось Оz
параллельно силам
![]() (рис. 31). Тогда проекции параллельных
сил на перпендикулярные им оси Ох и Оу
будут равны нулю и условия
(рис. 31). Тогда проекции параллельных
сил на перпендикулярные им оси Ох и Оу
будут равны нулю и условия
![]()
о
Рис. 31![]() тоже выполняется для всех систем
параллельных сил. Отбрасывая условия
равновесия, которые выполняются
тождественно при выбранном направлении
оси Оz,
и учитывая, что сумма проекций сил на
эту ось является алгебраической суммой
сил, из (41) получаем следующие три условия
равновесия пространственной системы
параллельных сил:
тоже выполняется для всех систем
параллельных сил. Отбрасывая условия
равновесия, которые выполняются
тождественно при выбранном направлении
оси Оz,
и учитывая, что сумма проекций сил на
эту ось является алгебраической суммой
сил, из (41) получаем следующие три условия
равновесия пространственной системы
параллельных сил:
![]() (42)
(42)
т.е. для равновесия пространственной системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма этих сил была равна нулю и суммы моментов сил относительно двух координатных осей, перпендикулярных силам, также были равны нулю.
Условия равновесия плоской системы сил
Р
Рис. 32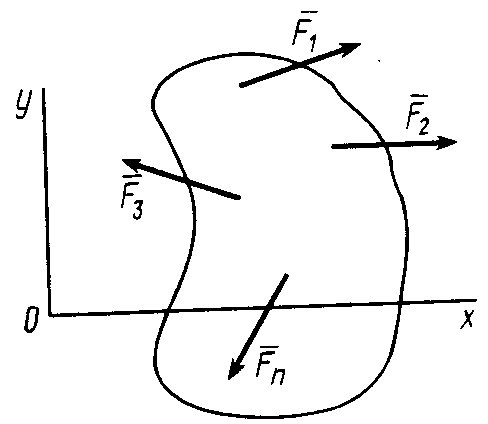 асположим
оси Ох и Оу в плоскости действия сил
(рис. 32). Так как ось Оz
перпендикулярна силам, то
выполняется для всех плоских систем
сил, т.е. является тождеством. Каждая из
сил расположена в одной плоскости с
осями координат Ох и Оу, и поэтому ее
моменты относительно этих осей равны
нулю. Таким образом, условия равновесия
асположим
оси Ох и Оу в плоскости действия сил
(рис. 32). Так как ось Оz
перпендикулярна силам, то
выполняется для всех плоских систем
сил, т.е. является тождеством. Каждая из
сил расположена в одной плоскости с
осями координат Ох и Оу, и поэтому ее
моменты относительно этих осей равны
нулю. Таким образом, условия равновесия
![]() становятся тождествами. Моменты сил
относительно оси Оz,
перпендикулярной силам, равны
алгебраическим моментам этих сил
относительно точки О. Таким образом,
становятся тождествами. Моменты сил
относительно оси Оz,
перпендикулярной силам, равны
алгебраическим моментам этих сил
относительно точки О. Таким образом,
![]() .
.
Из (41) для плоской системы сил после отбрасывания тождеств имеем следующие три условия равновесия:
![]() (43)
(43)
т.е. для
равновесия плоской системы сил,
действующих на твердое тело, необходимо
и достаточно, чтобы суммы проекций этих
сил на каждую из двух прямоугольных
осей координат, расположенных в плоскости
действия сил, были равны нулю и сумма
алгебраических моментов сил о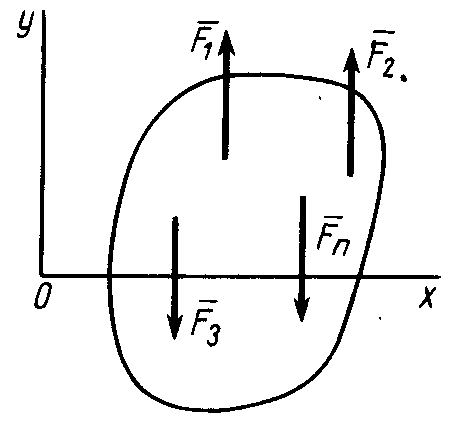 тносительно
любой точки, находящейся в плоскости
действия сил, также была равна нулю.
тносительно
любой точки, находящейся в плоскости
действия сил, также была равна нулю.
Д
Рис. 33
Итак, для плоской системы параллельных сил из (43) имеем следующие условия равновесия:
![]() (44)
(44)
т.е. для равновесия плоской системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма сил была равна нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости сил, также была равна нулю.
Из условий равновесия плоской системы сил (43) можно получить и условия равновесия плоской системы сходящихся сил, для чего за моментную точку надо взять точку пересечения линий действия сходящихся сил. Тогда последнее из условий станет тождеством и в качестве условий равновесия для плоской системы сходящихся сил останутся только два первых условия из (43).