

Коэффициент устойчивости
Задача
14. На
рис. 14 изображен трактор с навесным
рыхлителем. Т
— тяговое
усилие на гусеничном ходу;
![]() и
и
![]() — горизонтальная и
вертикальная составляющие результирующей
силы рыхления;
— сила сопротивления
движению самого трактора;
— горизонтальная и
вертикальная составляющие результирующей
силы рыхления;
— сила сопротивления
движению самого трактора;
![]() — общая
сила тяжести трактора с навесным
оборудованием;
— общая
сила тяжести трактора с навесным
оборудованием;
![]() —
допустимый (задаваемый) и расчетный
коэффициенты устойчивости.
—
допустимый (задаваемый) и расчетный
коэффициенты устойчивости.
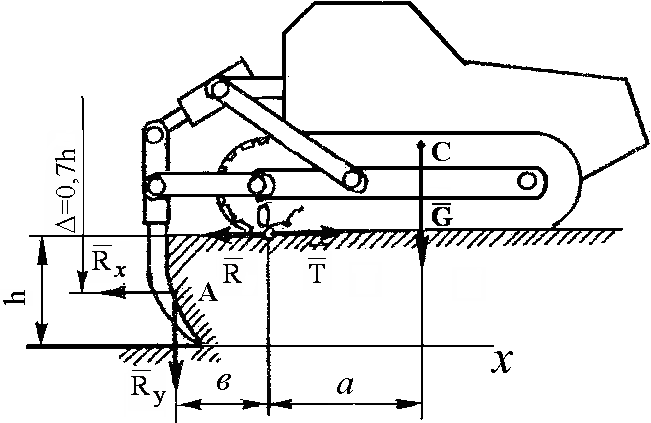
Рис. 14
Требуется объяснить два условия:
![]() ,
(1)
,
(1)
![]() (2)
(2)
РЕШЕНИЕ. Условие (1) есть условие трогания
с места вдоль оси
![]() и дальнейшего равномерного движения
трактора с навесным рыхлителем.
и дальнейшего равномерного движения
трактора с навесным рыхлителем.
Условие (2) есть соотношение
между опрокидывающим моментом силы
![]() и восстанавливающим
моментом сил
и восстанавливающим
моментом сил
![]() и
и
![]() относительно центра О.
Расчетный коэффициент устойчивости
относительно центра О.
Расчетный коэффициент устойчивости
![]() есть отношение
восстанавливающего момента к
опрокидывающему и не должен превышать
заданного допустимого значения
есть отношение
восстанавливающего момента к
опрокидывающему и не должен превышать
заданного допустимого значения
![]() .
.
Кинематика механизмов
Задача
15. Для
измерения малых промежутков времени
применяется стробоскоп (рис. 15), основными
элементами которого являются два
вращающихся соосно диска. Первый имеет
![]() радиальных прорезей, второй —
сплошной. Если подобрать частоту
вращения
радиальных прорезей, второй —
сплошной. Если подобрать частоту
вращения
![]() первого диска такой,
что при повороте на угол, равный углу
между двумя соседними прорезями ,
второй диск сделает полное колебание,
то проецируемая на него сквозь прорезь
стрелка будет казаться неподвижной.
Приняв за единицу времени продолжительность
поворота диска на угол ,
определить точность t
стробоскопических
часов, если
первого диска такой,
что при повороте на угол, равный углу
между двумя соседними прорезями ,
второй диск сделает полное колебание,
то проецируемая на него сквозь прорезь
стрелка будет казаться неподвижной.
Приняв за единицу времени продолжительность
поворота диска на угол ,
определить точность t
стробоскопических
часов, если
![]() ,
а
,
а
![]() .
.
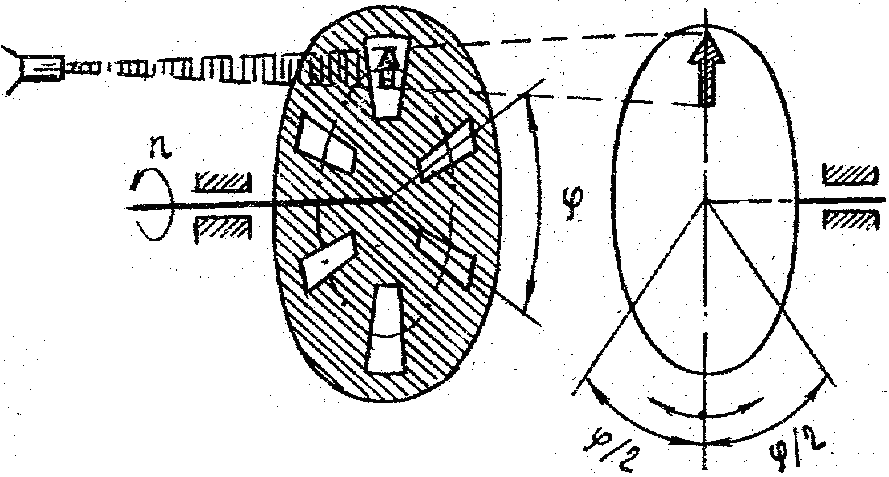
Рис. 15
РЕШЕНИЕ. Точность t
есть наименьший промежуток времени,
измеряемый с помощью часов. В данном
случае t = t,
= t.
С другой стороны,
![]() (так устроен первый диск). Так как
(так устроен первый диск). Так как
![]() ,
то
,
то
![]()
Задача 16. В вариаторе притирочного станка ведущий вал 1 фрикционной передачи вращается с постоянной угловой скоростью 1, делая 300 об/мин, и одновременно перемещается в направлений стрелки и обратно согласно уравнению d = (4 + 3cos2t) см. Радиусы дисков r1 = 5 см, r2 = 20 см.
Определить угловое ускорение вала 2 как функцию времени; для моментов t1 = 0, t2 = 0,25 с, t3 = 0,5 с определить ускорение точки М на ободе диска 2 (рис.16).

Рис. 16
РЕШЕНИЕ. При отсутствии проскальзывания в точке касания дисков К имеем
![]()
![]()
![]()
Угловое ускорение диска 2 равно
![]()
Ускорение точки М
![]() .
.
Для t1 = 0 с, t2 = 0,25 с, t3 = 0,5 с составим таблицу значений.
t |
d, см |
, с–1 |
, с–2 |
a |
t1 |
7 |
|
0 |
10 |
t2 |
4 |
|
|
308 |
t3 |
1 |
50 |
0 |
500 |
Задача 17. Насколько передвинется ползун С в тройном клине, если ползун А опустился на hA (рис. 17, а)?
РЕШЕНИЕ. Рассмотрим сложение скоростей (или перемещений) в сложном движении точек М (рис, 17, б) и К
(рис. 17, в).
Абсолютные скорости точек М и К равны:
![]() (1)
(1)
![]() (2)
(2)
где
![]() и
и
![]() — относительные скорости скольжения
точек М и К по подвижным
поверхностям клина В;
— относительные скорости скольжения
точек М и К по подвижным
поверхностям клина В;
![]() и
и
![]() — скорости клиньев А и В
относительно их направляющих, т.е.
скорости переносного движения для
точек М и К соответственно.
— скорости клиньев А и В
относительно их направляющих, т.е.
скорости переносного движения для
точек М и К соответственно.
|
|
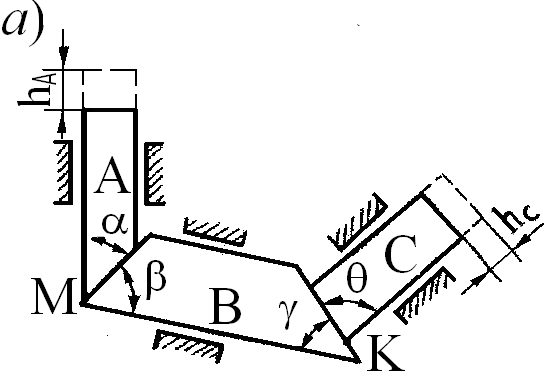
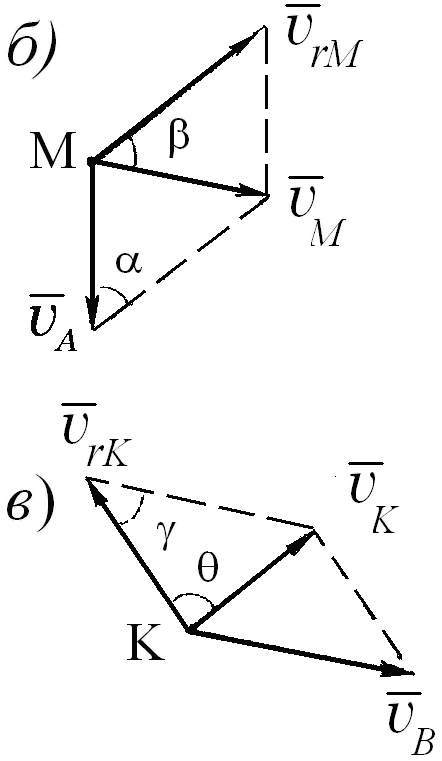
Рис. 17. Тонкая подача для изготовления детали
со сложным профилем
По теореме синусов из рис. 17, б и 17, в имеем
![]() (3)
(3)
Учитывая, что
![]() и
и
![]() и объединяя (1), (2) и (3), окончательно
получаем связь между скоростями
(перемещениями) ползунов А
и С:
и объединяя (1), (2) и (3), окончательно
получаем связь между скоростями
(перемещениями) ползунов А
и С:
![]()
![]()
Задача 18. Круглый кулачок 1 вращается вокруг оси А с угловой скоростью = 10 с–1. Опирающийся на него вертикальный толкатель 2 имеет в верхней части клин, взаимодействующий с подпружиненным горизонтальным ползуном. Определить скорость ползуна 3 для показанного положения механизма (рис. 18, а).
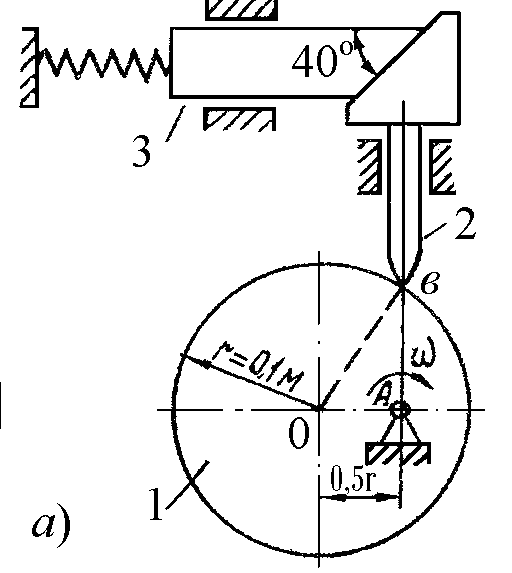
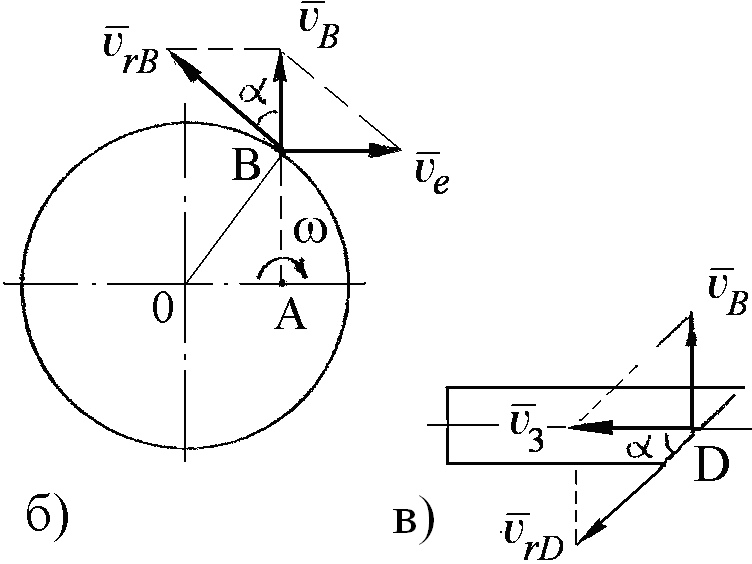
Рис. 18
РЕШЕНИЕ. На основании теоремы о сложении скоростей в сложном движении абсолютная скорость точки В вертикального толкателя равна (рис. 18, б):
![]()
где скорость переносного
движения
![]() = AB.
Из геометрии параллелограмма скоростей
имеем
= AB.
Из геометрии параллелограмма скоростей
имеем
![]()
Рассмотрим сложное движение точки D ползуна 3
(рис. l8,
в).
Для нее движение толкателя 2 со скоростью
![]() является переносным движением. Абсолютная
скорость точки D,
то есть скорость самого ползуна 3, равна:
является переносным движением. Абсолютная
скорость точки D,
то есть скорость самого ползуна 3, равна:
![]()
откуда
![]()
Задача 19. В механизме пресса кулачок 1, представляющий собой диск радиусом r = 4 см, вращается с постоянной угловой скоростью = 0,2 с–1 вокруг оси, проходящей через точку O перпендикулярно плоскости чертежа, и приводит в движение ползун 2, который скользит в направляющих 3. Для положения, показанного на рис.19,а, определить скорость и ускорение ползуна 2, если ОС = 3 см, а отрезок ОС горизонтален.
РЕШЕНИЕ. Абсолютную скорость точки А ползуна 2 определим как векторную сумму (рис. 19, б)
![]()
где
![]() — переносная
скорость;
— переносная
скорость;
![]()
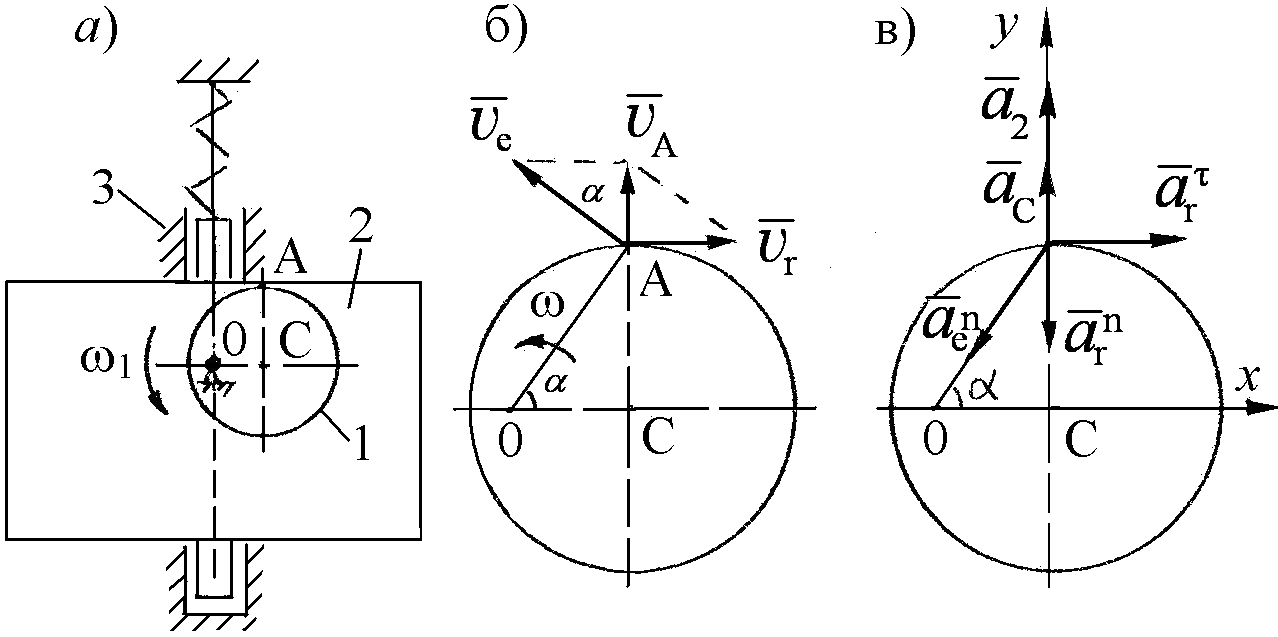
Рис. 19
![]()
Пo теореме о сложении ускорений в сложном движении точки А имеем (рис. 19, в)
![]() (1)
(1)
где
![]()
![]()
![]()
![]()
Спроектируем уравнение
(1) на
ось
![]() и
получим ускорение ползуна 2
и
получим ускорение ползуна 2
![]()
Задача 20. Три конические шестерни 1, 2, 3 (рис. 20, а) находятся в зацеплении. Каково отношение нормальных ускорений точек А и В сцепления шестерен?
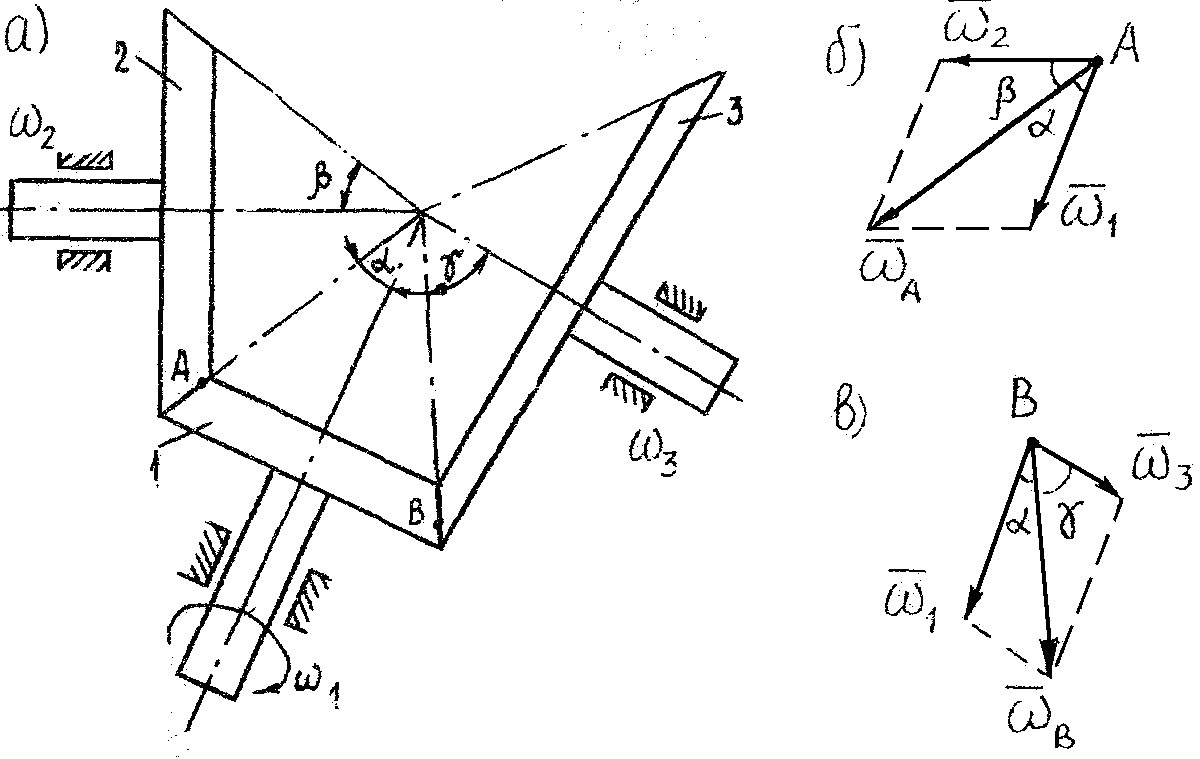
Рис. 20
РЕШЕНИЕ. При отсутствии проскальзывания в точке А для линейных скоростей запишем соотношение
![]() (1)
(1)
Так как оси вращения шестерен
пересекаются в одной точке О,
сложим угловые скорости вращения
![]() и
и
![]() ,
направленные по
соответствующим осям вращения, и получим
,
направленные по
соответствующим осям вращения, и получим
![]() мгновенную угловую
скорость точки А,
участвующей в обоих вращениях (рис,20,б);
по теореме синусов имеем
мгновенную угловую
скорость точки А,
участвующей в обоих вращениях (рис,20,б);
по теореме синусов имеем
![]() (2)
(2)
отсюда с учетом (1) получим
![]() (2)
(2)
Отношение нормальных ускорений точки А на шестернях 1 и 2 равно с учетом (1) и (2)
Для точки В из рис.20,в имеем
![]() (3)
(3)
Отношение нормальных ускорений точки В на шестернях 1 и 3 равно с учетом (3)

Задача
21. Резец
совершает прямолинейное
возвратно-поступательное движение,
так что его конец М
движется по неподвижной оси ОХ
по закону x = OM = A sin t.
Составить уравнение
движения точки М
относительно диска 1 (шпинделя),
вращающегося равномерно с угловой
скоростью
![]() вокруг точки О,
и найти траекторию этого относительного
движения (рис. 21).
вокруг точки О,
и найти траекторию этого относительного
движения (рис. 21).
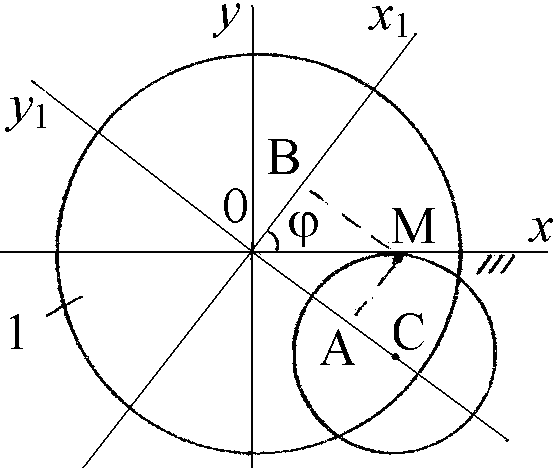
Рис. 21
РЕШЕНИЕ. Выберем подвижную систему координат х1Oy1, жестко связанную с диском 1 так, чтобы в начальной момент времени ось Oх1 совпадала с неподвижной осью Oх. Тогда уравнение переносного вращательного движения будет иметь вид = t.
Запишем координаты точки М в подвижной системе отсчета:
![]()
или
![]() Это
и есть уравнения относительного движения
резца – относительно тела 1.
Это
и есть уравнения относительного движения
резца – относительно тела 1.
Исключаем время t из уравнений движения и получаем уравнение траектории
![]()
т.е.
![]()
Таким образом, траекторией относительного движения резца (точки М) является окружность с радиусом A/2 и центром в точке с координатами (O; OC = – A/2).
Задача
22. Схват
А манипулятора движется по параболе,
описываемой уравнениями: xA(t) = 1,5t м
yA(t) = 0,5t2 м.
Кривошип OС
поворачивается вокруг точки O
по закону
![]() .
.
Считая, что в момент времени
t = 1 c
= 135o,
= 90o,
определить в этот
момент времени скорость и ускорение
шарнира В,
а также угловую скорость и угловое
ускорение звена АВ,
если ОС = СВ = 1 м,
АВ = ![]() м.
м.
РЕШЕНИЕ. В момент времени t = 1 с определим проекции скорости схвата А на оси х, y:
![]()
Определим скорость точки С:
![]()
Рассмотрим плоскопараллельное движение звена ВС
(рис. 22, а):
![]()
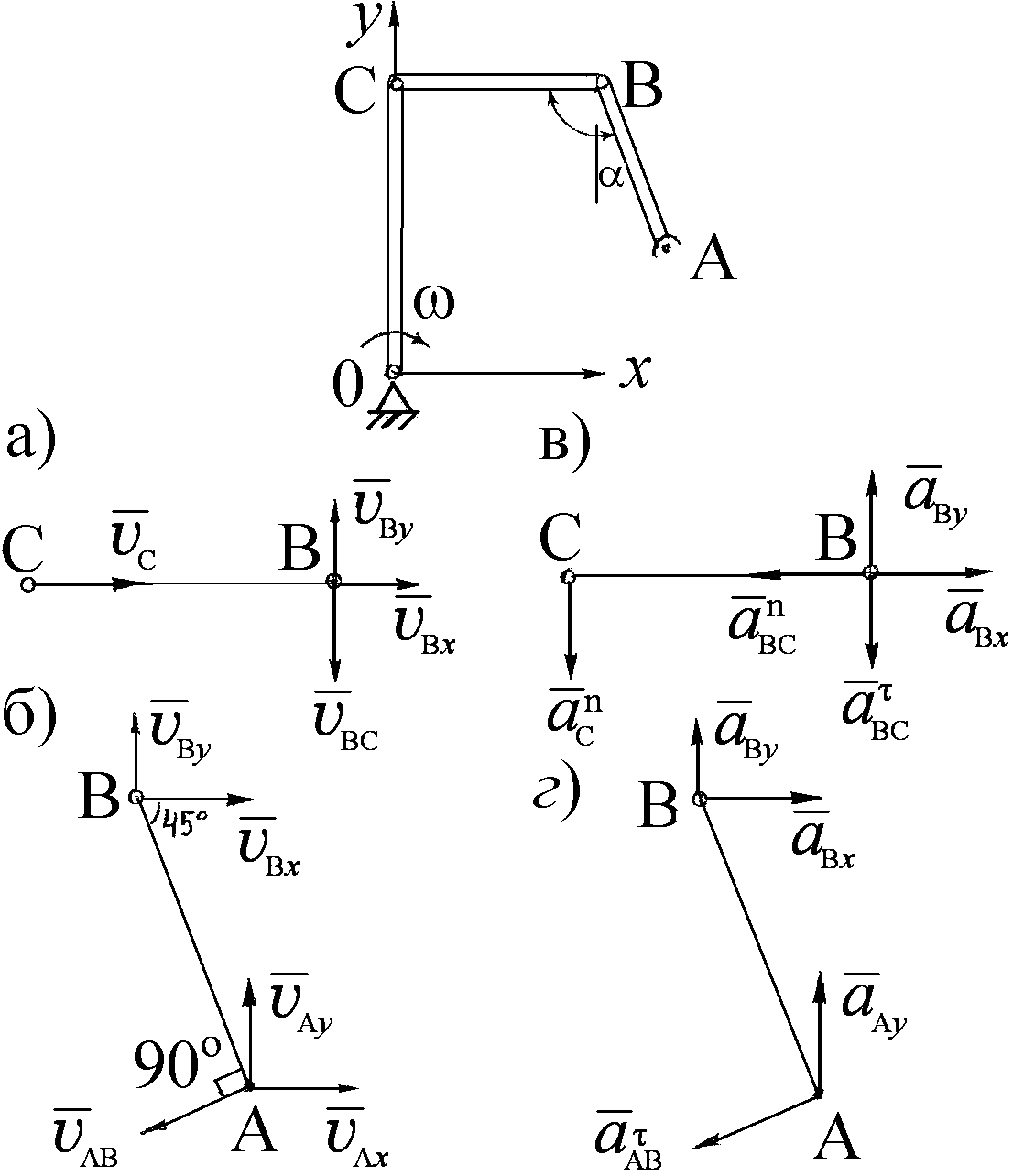
Рис. 22
или в проекциях на оси х и y имеем:
![]() (1)
(1)
![]() (2)
(2)
Рассмотрим сложное движения звена ВА (рис. 22, б)
![]()
или в проекциях на оси х и y
![]() (3)
(3)
![]() (4)
(4)
Сравним (1) и (3);
![]()
![]()
Отсюда следует
![]() ;
в момент времени t = 1 c
;
в момент времени t = 1 c
![]() .
.
Сравним (2) и (4);
![]()
![]()
![]()
![]()
![]()
Определим ускорения.
![]()
![]()
![]()
Из рис. 22, в
![]()
или в проекциях на оси x и y
![]() (5)
(5)
![]() (6)
(6)
![]()
Рассмотрим звено ВА (рис. 22, г):
![]()
![]()
или в проекциях на оси х у.
![]() (7)
(7)
![]() (8)
(8)
Сравним (5) и (7)
![]()
![]()
![]()
![]()
![]()
Таким образом,
![]()
то есть ускорение точки В направлено по горизонтали в сторону, противоположную положительному направлению оси х.
Задача 23.
Волновая передача включает три основных
элемента: вращающийся генератор I
и зубчатые ― упругий подвижный 2 и
жесткий неподвижный 3 венцы. Генератор
имеет обкатные ролики 4, которые катятся
по внутренней поверхности упругого
венца, образуя как бы "бегущую волну",
обеспечивающую сцепление обоих венцов.
С какой частотой
![]() будет вращаться вал венца 2 (необходимые
данные указаны на рис. 23) ?
будет вращаться вал венца 2 (необходимые
данные указаны на рис. 23) ?
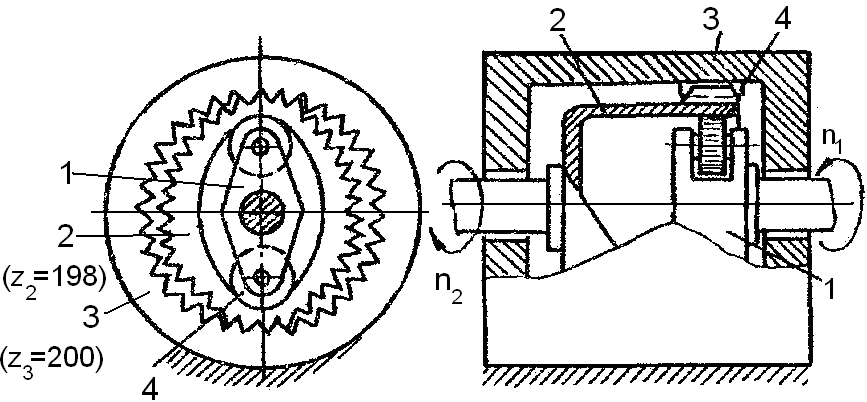
Рис. 23
РЕШЕНИЕ. Применим метод Виллиса. 1 ― угловая скорость ведущего вала является переносной скоростью для всей системы. Тогда для относительных угловых скоростей ролика 4 и подвижного венца 2 при отсутствии проскальзывания в точках сцепления имеем
![]() (1)
(1)
В этих же точках сцепления с неподвижным венцом 3 имеем
![]() (2)
(2)
Объединяя (1) и (2), получаем
![]()
Так как 3 = 0;
п,
r z,
то последнее соотношение принимает
вид
![]() откуда
откуда
![]()
Задача 24. Определить передаточное отношение k12 сферического вариатора в зависимости от угла поворота промежуточного звена 3.
Известны величины А, r, , = 60o (рис. 15).
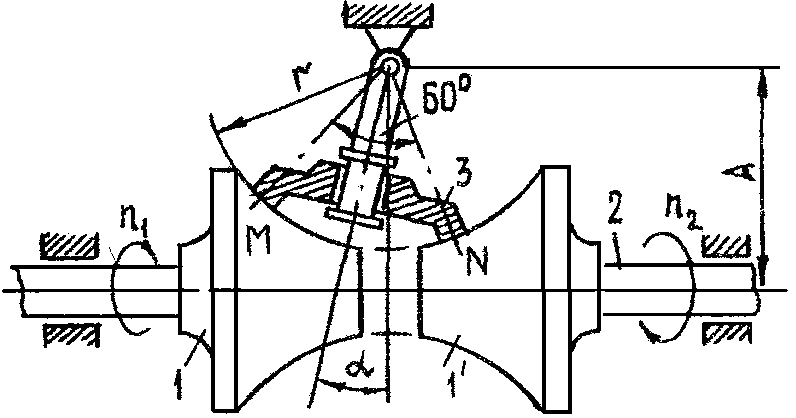
Рис. 24
РЕШЕНИЕ. Для определения передаточного отношения приравняем линейные скорости точек М и N деталей 1, 1' , вращающихся на валах 2, 2.
![]()
![]()
где п1, п2 – число оборотов в минуту валов 1 и 1'. Окончательно получим
![]()
Задача 25. В дифференциале зуборезного станка зубчатое колесо 4 сидит свободно на ведущем валу 1. На конце ведущего вала находится головка, несущая ось ab сателлитов 2–2, сцепленных с шестернями 3 и 4.
Определить угловую скорость ведомого вала 5, жестко сцепленного с шестерней 3, если угловая скорость ведущего вала равна 1, а шестерня 4 вращается с угловой скоростью 4 в направлении, противоположном вращению вала 1 (рис. 25).
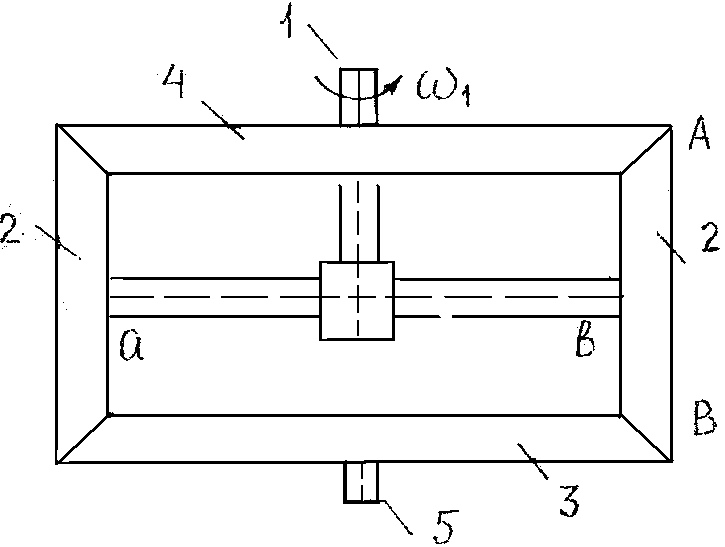
Рис. 25
РЕШЕНИЕ. Механизм имеет две независимые угловые скорости: угловую скорость 1 ведущего вала и 4 – угловую скорость свободно сидящей на валу 1 шестерни 4.
Сателлиты 2 совершают сложное движение: вращение вокруг вала 1 с угловой скоростью 12 и вращение вокруг собственной оси ab с угловой скоростью 1. Если вращение вала 1 происходит против часовой стрелки, то вращение шестерни 4 – по часовой стрелке. С учетом направлений 1 и 4 результирующие скорости сложного движения точек зацепления А и В шестерен 2, 4 и 2, 3 соответственно могут быть записаны как алгебраическая сумма скоростей относительного и переносного движений:
![]() (1)
(1)
![]() (2)
(2)
где по требованиям конструкции
![]() (3)
(3)
так как шестерня 5 закреплена на валу 5.
Вычтя из равенства (2)
равенство (1), получим с учетом (3)
![]() или искомая угловая скорость 5
ведомого вала равна
или искомая угловая скорость 5
ведомого вала равна
![]()