


Их конструкция отличается тем, что имеет фотоэлемент, который и производит анализ степени освещенности помещения.
Вторые могут воспринимать не только шум, но и включать свет при движении кого-либо в их поле действия. Но использование данного типа датчиков не совсем удобно из-за большого количества ложных срабатываний, происходящих изза домашних животных и прочей живности.
На сегодняшний день получили наибольшее распространение следующие модели
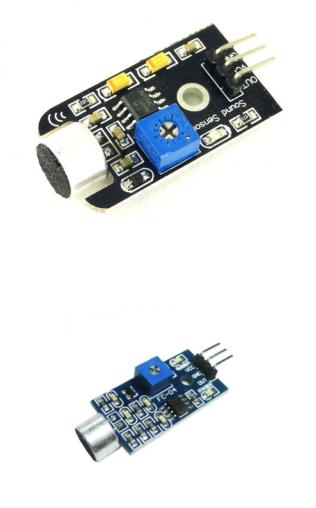
Датчик звука XD-74, который представлен на рис. 1.
Рис. 1. Датчик звука XD-74
Технические характеристики:
-необходимое напряжение: 4-6 В;
-выход: цифровой;
-максимальный радиус срабатывания – 5 м;
-габариты: 32×17×15 мм;
-масса: 12.5 г.
Микрофонный датчик звука KY-038, который представлен на рис. 2.
114

Рис. 2. Микрофонный датчик звука KY-038
Технические характеристики:
-необходимое напряжение: 3,3-5 В постоянного тока;
-необходимый ток: 10 мА;
-выход: цифровой и аналоговый;
-габариты (мм): 35 x 14.
Датчик звука (Trema-модуль v2.0), который представлен на рис. 3.
Рис. 3.Датчик звука (Trema-модуль v2.0)
Технические характеристики:
-необходимое напряжение: 5 В постоянного тока;
-необходимый ток: 3,3 ... 3,7 мА (зависит от громкости);
-чувствительность: -40 дБ ± 2 дБ;
-диапазон частот: 35 Гц ... 10 кГц;
-размер: 30x30 мм.
115
Датчик звука с цифровым сигналом на выходе, основанный на усилителе LM386. Цифровой сигнал на выходе образуется в том случае, если превышается пороговое значение звука, настраиваемого потенциометром (рис. 4).
Рис. 4. Датчик звука CH2
Звуковой индикатор XD-74 TZT, который представлен на рис. 5.
Рис. 5. Звуковой индикатор XD-74 TZT
1.Реагирует только на отсутствие или наличие шума (основан на принципе вибрации).
2.Не может определить размер звука или отдельные ча-
стоты.
116

3.Имеется отверстие для упрощениямонтажа (для болта).
4.Рабочеенапряжение — 3,3 В-5 В.
5.Выходная форма переключения выходаs -0 и 1High-Low.
6.Маленький размер печатной платы— 3,2 смx1,7 см[1]. Проведя анализ представленных датчиков, для реализа-
ции устройства был выбран датчик модели Trema-модуль v2.0, т.к. данный модуль обладает необходимыми техническими характеристиками, а также имеет удобную квадратную форму, обладает стандартными отверстиями, на которые удобно крепить другие элементы устройства.
Помимо самого звукового датчика для реализации правильной работы понадобиться микроконтроллер, который можно будет запрограммировать на выполнение определенных команд. В качестве такой микросхемы отлично подойдет модели ATtiny 13, которая обладает следующими техническими характеристиками:
-напряжение питания: 1,8-5,5 В;
-ширина данных: 8 бит;
-тактовоя частота 20 мгц;
-количество входов/выходов 6;
-общий вес: 0.25 г.
Данный микроконтроллер представлен на рисунке 6 и обладает миниатюрными размерами и его удобно программировать
Рис. 6. Микроконтроллер ATtiny 13
Разработанное устройство относится к приборам дистанционного управления, с помощью которых можно включать и выключать различные приспособления не касаясь их. Устройство имеет легкую настройку на реагирование различных зву-
117
ков, начиная звуками ходьбы и заканчивая щелчков пальцев. Это очень удобно и позволяет настроить спроектированный датчик под различные нужды. Представленное устройство имеет компактные размеры 30х30х30, что позволяет устанавливать данную разработку в различных местах.
Литература
1. Описание и разновидности датчиков звука, как сделать своими руками [Электронный ресурс]: про датчик.ru портал о датчиках и измерительных приборах – Электрон.текстовые дан. – Сеоника, 2018. - Режим доступа: https://prodatchik.ru/vidy/datchik-zvuka/
2.Подключение микрофонного модуля KY-038/KY-037 [Электронный ресурс]: ёduino - Электрон.текстовые дан. – М.: 2017. - Режим доступа: https://www.yourduino.ru/ blogs/blog/ky038urok
3.Датчик уровня звука [Электронный ресурс]: 3 Diy - Электрон.текстовые дан. – М.: 2013. – Режим доступа: https://3d- diy.ru/wiki/arduino-datchiki/datchik-zvuka-arduino/
4.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
5.Automated expert support complex based on a machine learning semantic processor/ Chirkov O.N., Tsipina N. V., Slinchuk S. A., Vorobyev E. I.// Journal of Physics: Conference Series. Krasnoyarsk Science and Technology City Hall. Krasnoyarsk, Russian Federation, 2020. С. 12062.
Воронежский государственный технический университет
118

УДК 62-97/-98
А. С. Костюков, С. П. Мякинин, Н. Р. Ломакин, Ю. М. Пшеницина, Н. А. Хромых
ПОРТАТИВНЫЙ ЦИФРОВОЙ ОСЦИЛЛОГРАФ
В статье представлено описание разработанного портативного цифрового осциллографа, благодаря своей конструкции разработанное изделие является универсальным инструментом, который можно использовать совместно как с персональным компьютером, так и сосмартфонам любой модели.
Ключевые слова: портативный осциллограф, SoundcardOscilloscope, SmartScope.
Устройство представляет собой портативную приставку, которая подсоединяется к линейному выходу звуковой карты через разъем формата jack (рис. 1).
Рис. 1. Приставка в собранном виде
Подключение к осциллографу осуществляется через входы, на которых установлены защитные резисторы, осуществляющие деление сигнала на 1, 10 и 100. Переменным резистором производится подстройка чувствительности всего
119
устройства. Полоса пропускания составляет 100 Мгц, частота дискретизации 1 Гвыб/с. Непосредственно работа осциллографа осуществляется с помощью программы SoundcardOscilloscope на персональных ПК и ноутбуках (рис. 2) и приложения
SmartScope на смартфонах (рис. 3).
Рис. 2. Осциллограмма на компьютере
Рис. 3. Осциллограмма на смартфоне
К достоинствам разработанного осциллографа можно отнести его малые размеры и компактность, простоту перевозки и хранения. Совместную работу осциллографа, как с компьюте-
120

рами, так и со смартфонами (рис. 4). Так же к достоинствам можно отнести простоту изготовления представленного осциллографа[1].
Рис. 4. Подключение приставки к смартфону
Разработанное устройство благодаря своим размерам и компактности может быть использовано как в домашних условиях, для проведения каких либо работ, в учебных заведениях для проведения лабораторных и практических занятий, а также на производствах.
Литература
1.Баканов Г. Ф. и др. Основы конструирования и технологии радиоэлектронных средств/ учебное пособие для студентов высших учебных заведений/ - М.: Издательский центр «Ака-
демия», 2007. − 368 стр.
2.Петров К. С. Радиоматериалы, радиокомпоненты и электроника: учебное пособие СГ1Б.: Питер, 2003521 с.
3.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
Воронежский государственный технический университет
121

УДК 62-555.57
А. С. Костюков, А. Б. Антиликаторов, Н. А. Хромых, Г. И. Мурачёв, А. В. Бугаев
ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК НА ОСНОВЕ ФОТОРЕЗИСТОРОВ
В статье рассматривается разработка тензорезистивного датчика, который служит для измерения сгибания изделий. Конструктивной особенностью датчика является его построение на фоторезисторах и светодиодах, благодаря этому появляется возможность использования физических законов распространения света.
Ключевые слова: тензорезисторный датчик, фоторезистор, термоусадочная трубка.
В основе принципа работы датчика лежитизменениеплотностисветовогопотоканафоторезисторепридеформациисветовода. Количество светового излучения, посылаемое диодом на резистор по силиконовому катетеру, зависит от того, как он изогнут. Таким образом, сопротивление фоторезистора будет зависеть от изгиба. При помощи нескольких подобных датчиков можно собрать свою«сенсорную перчатку»для различных задач.
Рис. 1. Элементы конструкции
122

Для сборки такого датчика намнеобходимо иметь(рис.1):
1.Фоторезистор MLG4427, 560нМ 2кОм~2мОм d=4мм;
2.Светодиод L-43GD (L-44GD) d=4мм 16мКд 568нМ;
3.Силиконовая трубка с внутренним диаметром 3-4 мм;
4.Черная изоляционная лента/термоусадочная трубка;
5.Токоограничивающий резистор (220Ом);
6.Подтягивающий резистор(1кОм).
Выбор компонентов обусловлен параметрами светодиода и фоторезистора, а также условиями работы данной схемы
(рис. 2).
Рис. 2. Электрическая принципиальная схема
Изготовление данного датчика происходит в следующей последовательности: сначала отрезается подходящий по размеру участок силиконового катетера (достаточно 3 – 13 см), затем с одного конца катетера крепится фоторезистор, а с противоположного – светодиод, далее вся конструкция обматывается изоляционной лентой, в идеале черной, либо используется термоусадочная трубка. Лучшим вариантом является использование силиконовой трубки чёрного цвета. Подключения выполнить по вышеприведённой схеме. Достоинства и недостатки данной конструкции приведены ниже.
Достоинства:
1.Доступная цена комплектующих;
2.Простота изготовления;
3.Устойчивая линейность показаний датчика;
123

4. Распространенность используемых материалов. Недостатки:
1.Высокая зависимость от механических воздействий (часто требуется выпрямлять трубку);
2.Погрешность показаний.
Данные проблемы решаются довольно просто:
1.Для повышения механической устойчивости трубки необходимо надеть на каждый ее конец металлическую пружину
изафиксировать термоусадочной трубкой.
2.Проблема нелинейной зависимости снимаемого напряжения от угла изгиба легко решается интерполяцией. Строим график зависимости по показаниям, применяем функцию интерполяции. Получаем плавную зависимость из исходной, выводим зависимость аргумента от функции, вносим эту зависимость в программный код.
Также в результате разработки фоторезистивного датчика для его фиксациина поверхности было сконструировано крепёжное изделие в виде полукольца, схема которого представлена ниже (рис. 3):
Рис. 3. Узел крепления
Данное крепление также не лишено недостатков: оба полукольца выполнены слишком тонкими, что отрицательно сказывается на механической прочности самого крепления, а также на надежности фиксации как трубки - датчика, так и самого крепежа на перчатке.
Способы устранения недостатков следующие:
1.Узел крепления необходимо сделать шире, около 5 мм.
2.На большое полукольцо для достижения лучшей фик-
124

сации на пальце необходимо с внутренней стороны наклеить полоски из губчатой резины или плотного полиуретана (вариант показан на рисунке).
3. Разрез малого полукольца выполнить меньшей ширины для надёжной фиксации трубки.
Внешний вид доработанного изделия представлен на рис. 4 (показан без светонепроницаемой обмотки).
Рис. 4. Общий вид конструкции
Литература
1.Калиниченко А. В. Справочник инженера по кон- трольно-измерительным приборам и автоматике. 3-е изд. доп. и перераб. / М: Инфраинженерия, 2018.
2.Шишмарёв В. Ю. Технические измерения и приборы: учебник для вузов / В. Ю. Шишмарёв.–3-е изд., перераб. и доп.– Москва: издательство Юрайт, 2020.
3.Турецкий А. В. /Физические основы получения информации: учебное пособие / А. В. Турецкий, В. А. Шуваев Воронеж: ФГБОУВПО «Воронежский государственный технический университет», 2012. Ч.2. 105 с.
Воронежский государственный технический университет
125
УДК 62-135.1
И. В. Свиридова, И. А. Турецкий, Ю. В. Худяков
АКВАРИУМНЫЙ АВТОМАТ
В работе представлено описание конструкции аквариумного автомата, позволяющего упростить процесс содержание декоративных рыбок. Он отличается большим набором функций и современным интерфейсом.
Ключевые слова: аквариум, управление, микроконтроллер, конструкция.
Устройство представляет собой систему автоматизации уходом за домашними рыбами в аквариуме. Дополнительный канал может быть использован для имитации присутствия людей в комнате, путем включения и выключения освещения по заданному расписанию. Управление двумя кормушками позволяет применять разные виды корма для кормления, например хлопья и гранулы. Устройство может быть настроено для автоматизации других видов деятельности, а также быть встроено в систему «умный дом». Система самодиагностики позволяет определить неполадки без применения специального оборудования. Наличие аварийных алгоритмов позволяет сохранить работоспособность даже при наличии неполадок
Структурная схема устройства представлена на рис. 1. Основу устройства составляет микроконтроллерный модуль (ArduinoProMini [1]) и графический сенсорный экран со встроенным контроллером фирмы Nextion. Данные узлы работают в одной связке. Обмен данными происходит по интерфейсу UART. На экране отображается графический многостраничный интерфейс, выполненный в виде окон с кнопками. На него также выводится информация о режимах работы аппарата. Для подсчета точного времени используется модуль на микросхеме DS3231, обладающей повышенной точностью хода. Максимальный уход времени составляет всего 2 минуты в год. Модуль имеет встроенную батарею питания для обеспечения подсчета времени в отсутствии питания всего устройства.
126

Рис. 1. Структурная схема аквариумного автомата
Для коммутации нагрузки разработана силовая плата на симисторах, позволяющая подключать мощность до 500 Вт на канал. С помощью блока розеток подключаются потребители: аэратор, освещение, нагреватель и устройство 4 канала.
С блока розеток также поступает напряжение на блок питания, выдающего5В, необходимые для работывсего устройства.
Температура измеряется выносным датчиком на микросхеме DS18B20. Данные с него поступают в микроконтроллерный модуль по интерфейсу 1-Wire. Блок управления кормушками подключается к микроконтроллерномумодулю по интерфейсуIIС.
Внешний вид устройства со снятой внешней крышкой представлен на рис. 2, а макет модуля управления кормушками на рис. 3. Кормушки представляют собой бункер со шнеком в нижней его части. Шнек имеет привод от шагового двигателя. Шаговые двигатели запитываются от драйверов, а драйверы управляются модулем контроллера IIC на микросхеме PCF 8574. Такая реализация позволяет обойтись кабелем всего в 4 жилы, который связывает кормушки с основным устройством. Устройство позволяет регулировать дозу корма.
127

Рис. 2. Внешний вид устройства со снятой внешней крышкой
Рис. 3. Внешний вид макета управления кормушками
128

Структурная схема управляющей программы представлена на рис. 4.
Рис. 4. Структурная схема управляющей программы
При подаче питания вначале запускается система диагностики интерфейсов и модулей, подключенных к микроконтроллеру. Затем происходит считывание данных с сенсорного экрана и других внешних модулей, а также вывод этой информации на экран. Также осуществляется включение нагрузки в соответствии с установленными пользователем параметрами.
129
Внешний вид графического интерфейса экрана представлен на рис. 5.
Рис. 5. Внешний вид графического интерфейса экрана
На данный момент устройство обладает следующими функциями:
-точный подсчет времени, а также наличиекалендаря;
-4 канала управления нагрузкой;
-включение и выключение по установленному времени освещения в аквариуме;
-точное измерение температуры с погрешностью ±0,5 ºС;
-контроль температуры и отключение нагревателя в случае превышения установленного предела;
-включение и отключение по времени аэратора или другой нагрузки мощностью до 0,5 кВт;
-включение и выключение по времени нагрузки дополнительного четвертого канала (выбирается пользователем);
-выход на управлениедвумя кормушкамис протоколомI2C;
-индикация времени;
-индикация температуры;
-индикация состояние каналов (включен/отключен)
-индикация следующего времени кормления
-встроенная самодиагностика для определения неполадок в работе;
130
- цветной графический сенсорный экран высокого разре-
шения;
-удобное многостраничное меню;
-возможность обеспечения кормления рыб при неработающем модуле часов реального времени;
-возможность настройки дозы подачи корма;
-сохранение функции подсчета времени при отключенном питании;
-сохранение пользовательских установок при отключении питания;
-функция ночного режима, при котором на экран выводится изображение луны;
-функция обеспечения кормления в случае пропуска после аварийного отключения питания;
-индикация неисправностей после самодиагностики. Разработанное устройство будет полезно при домашнем
содержании рыбок, так как позволяет обеспечить нормальное функционирование аквариума при длительном отсутствии, например, во время отпуска.
Литература
1.О. Ю. Макаров, А. В. Турецкий, М. В. Хорошайлова «Электроника и микропроцессорная техника» Практикум: учеб.пособие [Электронный ресурс]. – Электрон. текстовые и граф. данные (5,0 Мб) / О. Ю. Макаров, -Воронеж: ФГБОУ ВО «Воронежский государственный технический университет», 2019.
2.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
3.Башкиров А. В. Эффективная архитектура на основе плис для полностью параллельного стохастического LDPCдекодера / А. В. Башкиров, И. В. Свиридова, Д. С. Андреева // Вестник Воронежского государственного технического университета. - 2018. - Т. 14. - № 3. - С. 101-107.
Воронежский государственный технический университет
131
УДК004.891.2
О. Н. Чирков, А. Д. Добриков
АРХИТЕКТУРА УПРАВЛЯЮЩЕЙ ИНФОРМАЦИОННОЙ СИСТЕМЫ КИБЕРАССИСТЕНТА
В работе представлено описание архитектуры Киберассистента – управляющей информационной системы с искусственным интеллектом, которая позволит осуществлять прием, обработку, регистрацию, учет и вынесение решения по выполнению входящих запросов, в том числе, без участия человека.
Ключевые слова: Киберассистент, киберсистема, диалоговый процессор, управляющий модуль, адаптер.
Опишем проблему создания управляющей информационной системы. Назовем такую систему - Киберассистент (КА).
Процесс кибернетизации отдельного предприятия будет происходить поэтапно. В его структуру в различных сферах деятельности будут точечно внедряться отдельные КА, которые в последствии объединятся в общую киберсистему предприятия. Важно, чтобы люди, которые будут взаимодействовать с КА, смогли делать это с минимальной предварительной подготовкой. А это можно обеспечить только если у КА будет возможность взаимодействия с человеком на естественном языке.
Интерфейс взаимодействия с человеком на естественном языке позволяет:
-обеспечить более легкое встраивание КА в существующую схему управления предприятием;
-понизить необходимую для взаимодействия с КА квалификацию сотрудников, поскольку позволяет делать это практически без обучения;
-более эффективно реализовывать контакты с контрагентами и другими людьми, не являющимися сотрудниками предприятия.
КА должен удовлетворять следующим требованиям:
1) иметь возможность взаимодействия с человеком на естественном языке по наиболее распространенным каналам коммуникаций, используемым в общении между людьми;
132
2)иметь возможность вести диалог по нескольким каналам одновременно;
3)иметь возможность управления внешними процессами
врежиме реального времени;
4)иметь низкую ресурсоемкость (10 - 20 одновременных диалогов при использовании в качестве сервера среднего офисного ПК);
5)иметь возможность использования, как в качестве облачного сервера, так и в виде приложения, устанавливаемого на серверах заказчика;
6)иметь возможность развертывания на нескольких серверах при нехватке аппаратных ресурсов;
7)процессу инициализации динамически создавать варианты системы различной архитектуры, комбинируя доступные компоненты согласно описанию в файле конфигурации;
8)иметь низкие требования к квалификации обслуживающего персонала (установку, конфигурирование и простую настройку должен иметь возможность осуществлять человек, имеющий квалификацию продвинутого пользователя ПК, после ознакомления с инструкцией по эксплуатации объемом в несколько страниц текста);
9)иметь возможность тонкой настройки внутренних процессов системы подготовленным специалистом;
10)иметь возможность подключения к распространенным сервисам и приложениям через их API;
11)иметь собственный API для подключений из внеш-
ней среды;
12)для оптимизации разработки внутренняя архитектура КА должна иметь модульную структуру при которой разработка нового или изменение уже существующего модуля не затрагивало бы остальную часть системы.
Функциональная схема Киберассистента представлена на рис. 1.
133

Рис. 1. Функциональная схема Киберассистента
Исходя из требований 1, 2, 3 и 10 была определена базовая архитектуру КА [1].
Управляющий модуль (УМ) определяет поведение системы с момента старта до момента остановки. Он выполняет развертывание платформы при запуске и свертывание системы при получении команды на остановку, в режиме реального времени управляет системой и, при необходимости, внешними процессами. Код управляющего модуля выполняется в одном или нескольких отдельных потоках.
Диалоговый процессор (ДП) реализует функцию взаимодействия с человеком на естественном языке. Динамически создается управляющим модулем и подключается к физическому каналу коммуникаций. С разрешения УМ принимает входящие вызовы, по команде УМ инициирует исходящие вызовы, ведет диалог с человеком согласно назначенному скрипту, в случае императивного программирования диалогов или под управлением искусственного интеллекта. О результатах своих действий или изменении состояния информируем УМ через специально разработанный механизм уведомлений. В процессе диалога может получать информацию от объектов окружающей среды или воздействовать на них через адаптеры элементов инфраструктуры (АЭИ). Код диалогового процессора выполняется в нескольких параллельных потоках, количество которых зависит от текущей его конфигурации.
Под элементом инфраструктуры (ЭИ) здесь и далее по тексту понимается объект окружающей среды, которым можно управлять или от которого можно получать информацию по доступным информационным каналам. Чаще всего это сервис или приложение стороннего производителя, имеющее программный
134
интерфейс приложения (API), но в качестве ЭИ также может выступать датчик или физический исполняющий механизм.
Адаптер элемента инфраструктуры реализует API элемента инфраструктуры и переводит его команды в вид, доступный для использования в ДП и УМ. Под каждый тип ЭИ разрабатывается специальный адаптер. На определенном этапе развития системы предполагается создать внешний интерфейс, позволяющий создавать и подключать свои АЭИ внешним разработчикам, но минимальный набор адаптеров для самых популярных ЭИ будет изначально включен в систему.
После анализа различных подходов были сформулированы следующие основные принципы построения приложения.
1.Каждый элемент системы имеет интерфейс, в котором реализованы четыре функции: expand (развернуть), collapse (свернуть), activate (активировать), deactivate (деактивировать).
2.Система организована иерархически. Корневым элементом является управляющий модуль, он является родительским для ДП и АЭИ, ДП в свою очередь является родителем для своих компонентов и т. д.
3.Система разворачивается иерархически. Родительский элемент создает дочерние элементы согласно информации
вфайле конфигурации, и, ничего не зная об их внутреннем устройстве, дает команду на развертывание, передавая в качестве параметра тот же файл конфигурации, из которого дочерние элементы сами выбирают нужные для их инициализации параметры. Эти действия повторяется, пока вся система не будет полностью развернута.
4.Система сворачивается иерархически. Родительский элемент дает своим дочерним элементам команду на сворачивание, ждет пока это произойдет, и только после этого сворачивается сам.
5.Система активируется и деактивируется иерархически, по тем же самым принципам.
6.При обращении к дочернему элементу родитель использует интерфейс, разработанный для этого класса элементов.
7.При обращении к родителю дочерний элемент использует специально разработанный универсальный механизм уведомлений, поскольку не знает о родителе ничего, кроме того, что он есть.
135
Такой подход позволяет разрабатывать компоненты киберсистем в условиях максимальной изоляции и динамически выстраивать системы различной архитектуры, комбинируя имеющиеся компоненты. Для его внедрения была разработана система классов С++, которая реализует данную логику с учетом многозадачности.
КА и его компоненты разрабатываются на языке программирования C++ под Windows с использованием WinAPI. Библиотеки Microsoft более высокого уровня (например, Microsoft Foundation Classes, MFC) не используются, поскольку планируется последующий перевод системы под ОС Linux и другие. В целях ускорения разработки, а в некоторых случаях, и в целях популяризации системы нами допускается в дальнейшем использование для создания отдельных компонентов других распространенных языков программирования (Python, 1С и т. д.).
Литература
1.Automated expert support complex based on a machine learning semantic processor/ Chirkov O. N., Tsipina N. V., Slinchuk S. A., Vorobyev E. I.// Journal of Physics: Conference Series. Krasnoyarsk Science and Technology City Hall. Krasnoyarsk, Russian Federation, 2020. С. 12062.
2.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
Воронежский государственный технический университет
136
УДК 621.36
Н. В. Астахов, Э. Э. Каграманов, В. С. Стёпин, Н. В. Ципина
РАЗРАБОТКА СТЕНДА ДЛЯ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИХ РАБОТ
В УСЛОВИЯХ ИММЕРСИОННОГО ОХЛАЖДЕНИЯ
Бурное развитие радиоэлектроники влечет за собой увеличение выделения тепловой энергии. Иммерсионной охлаждение является эффективным методом отвода тепла, но при его использовании, инженер сталкивается с проблемой подбора оптимального объема жидкости при комбинированном воздействии климатических факторов.
Ключевые слова: иммерсионное охлаждение, разработка, нагрев, лабораторный стенд.
Вусловиях современного развития радиоэлектронного комплекса инженеры столкнулись с проблематикой увеличения нагрева теплонагруженных узлов. Использование громоздких радиаторов утяжеляет конструкции, а использование принудительных охладителей в виде различных вентиляторов значительно усложняет ее.
Одним из вариантов решение стало использование жидкостного охлаждения закрытого и открытого типа, которое зарекомендовало себя благодаря высокому коэффициенту теплопередачи и возможности полного покрытия теплонагруженных узлов. Иммерсионное охлаждение набирает популярность и уже появляется не только на различных специализированных предприятиях, но также и в домашнем применение в качестве системы охлаждения персональных компьютеров.
Проблематика иммерсионного охлаждения заключается
вотсутствии экспериментально подтверждённых эффективных математических формул для проведения расчета необходимого объема жидкости в различных теплофизических условиях.
Врешение этой проблемы особое место занимает специальное оборудование, с помощью которого можно получить все параметры системы охлаждения и произвести экспериментальные исследования изменения этих параметров в определенных условиях.
137

Разработанное устройство (рисунок) является стендом для проведения научно-исследовательских работ. Его функциональное назначение — это экспериментальный анализ теплофизических процессов в условиях иммерсионного охлаждения и комбинированного воздействия различных средств охлаждения и теплоотвода.
Рис. Стенд для проведения научно-исследовательских работ
Конструкция стенда включает в себя 3 функциональных блока: емкость для испытуемого образца, блок охлаждения, а также блок коммутации и электропитания. Емкость является сменным элементом и подбирается в зависимости от требуемого объема жидкости или габаритов охлаждаемого блока РЭС. Блок охлаждения также является сменным элементом и может быть осуществлена замена радиаторной части или воздушного охлаждения на элементы с иными характеристиками. Блок коммутации и электропитания содержит в себе преобразователь напряжения, коммутационный узел, панель управления и плату контроля термодатчиков.
Принцип работы стенда прост. При включение исследуемого образца происходит выделение тепла теплонагруженными элементами. Датчики отслеживают изменение температуры и передают его оператору. В ходе исследования существует возможность регулировки объема жидкости, параметров охлади-
138
тельной системы и переключения режимов принудительной и естественной конвекции.
Литература
1.Самойленко Н. Э. Оптимизация конструкций системы охлаждения электронного модуля с помощью системы автоматизированного проектирования SolidWorks / Н. Э. Самойленко, Н. В. Ципина, И. В. Чепрасов, А. Ю. Барагузин, С. С. Потапов.// Проблемы обеспечения надежности и качества приборов, устройств и систем Межвузовский сборник научных трудов. Воронеж. − 2018. − С. 130-138.
2.Жиряков А. А. Разработка лабораторного стенда для
измерения температур в различных видах корпусов/ А. А. Жиряков, Н. А. Федосов, Н. В. Ципина// Научная опора Воронежской области Сборник трудов победителей конкурса научно-исследовательских работ студентов и аспирантов ВГТУ по приоритетным направлениям развития науки и технологий. Воронеж. − 2019. С. 311-313.
3.Макаров О. Ю. Комплексный подход к решению задач анализа и обеспечения тепловых характеристик при проектировании РЭС / О. Ю. Макаров, Н. В. Ципина, В. А. Шуваев// Радиотехника. – 2017. – № 6. – С. 166-170.
4.Муратов А.В. Способы обеспечения тепловых режимов РЭС/ Муратов А. В., Ципина Н. В. // учебное пособие ГОУВПО ВГТУ Воронеж – 2007. – 98 С.
5.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
Воронежский государственный технический университет
139
УДК 621.36
М. А. Курганский, Н. В. Ципина
РАЗРАБОТКА СВЕТОДИОДНОГО КУБА
Много людей обращают внимание на светодиодный куб, исходя из этого, его эффективнее использовать в рекламе, программировании и дизайне интерьера. Во время разработки инженер сталкивается с такими проблемами как, отвлечение водителей от дороги из-за яркости светодиодов и с нагрузкой на глаза из-за мерцания и цвета светодиодов.
Ключевые слова: светодиодный куб, разработка, 8х8х8, реклама, программирование, для дизайна.
Вусловиях современного развития радиоэлектронного комплекса на смену светодиодным матрицам в рекламе скоро могут прийти светодиодные кубы различных размеров. Использование его в качестве дизайна интерьера так же будет востребовано, так как он выглядит достаточно необычно в отличие от светодиодных матриц.
Проблематика светодиодного куба заключается в отвлечении водителей от дороги из-за яркости светодиодов и в нагрузке на глаза из-за мерцания и цвета светодиодов, ведь, как известно, синий цвет плохо влияет на здоровье глаз и на сон[1],
аот мерцания светодиодов они быстрее устают, к тому же кто то может не переносить мерцания AMOLED экранов смартфонов, люминесцентных ламп и так далее, соответственно им данное изделие будет противопоказано.
Врешении этих проблем может помочь изменение нескольких параметров таких как увеличение сопротивления резисторов для уменьшения яркости, замена синих светодиодов на любой другой цвет, а так же программное увеличение частоты мерцания светодиодного куба.
Разработанное устройство на рисунке называется светодиодный куб 8х8х8, он предназначен для отображения любых объёмных геометрических фигур, изображений, анимаций и надписей в трёхмерном пространстве.
140

Рис. Светодиодный куб 8х8х8
Конструкция куба включает в себя 512 светодиодов для отображения фигур, 2 светодиода для отображения переключения анимации, из 9 сдвиговых регистров, 8 управляют 64 рядами светодиодов, а последний девятый управляет восемью транзисторами, которые в свою очередь управляют слоями, 66 резисторов для ограничения тока, 2 кнопки для переключения анимаций, плата Arduino Nanoс микропроцессором, которая подаёт сигналы на сдвиговые регистры.
Принцип работы прост. Микропроцессор подает прямоугольные импульсы на сдвиговые регистры, тем самым управляя ими, в свою очередь они поочередно подают сигналы на вертикальный ряд светодиодов, и в зависимости от того какой транзистор открыт, светодиоды загораются в определённом слое.
Литература
1.Влияние синего цвета на зрение – электронные данные
-https://www.ochkov.net/informaciya/stati/kak-sinij-svet-vliyaet-na- zrenie.htm
Воронежский государственный технический университет
141
УДК 621.9
Н. В. Ципина, Н. Э. Самойленко, Н. Ф. Сурмин
МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ ТЕПЛОВОГО РЕЖИМА КОНСТРУКЦИИ РЭС
В данной статье приводится описание задания теплового режима кристалла с помощью моделирования в системе автоматизированного проектирования. Приведено математическое описание модели, заданы основные неизменные параметры модели. Составлен алгоритм проведения работы. В соответствии с ним проведено моделирование и последующая оптимизация конструкции. Основной задачей, решаемой этим алгоритмом, является снижение перегрева чипа при неизменных геометрических параметрах радиатора.
Ключевые слова: чип, перегрев, радиатор, моделирование.
В настоящее время задача формирования оптимального теплового режима РЭС имеет большое значение для корректного функционирования устройства. Существуют такие случаи, при которых габаритные размеры изделия строго ограничены техническим заданием или иными требованиями. В таких условиях вопрос теплоотведения от важных элементов устройства становится особенно важным. Есть вероятность, что при строго фиксированных размерах изделия задачу теплоотвода не удастся решить методом оптимизации конструкции. В таком случае стоит обратить внимание на материалы позволяющие улучшить отвод тепла от теплонагруженного элемента.
При решении подобных задач необходимо ещё на этапе проектирования изделия учесть подобную проблему и принять меры по её предотвращению. Надо проверить работоспособность самой идеи, оценить её потенциальную пользу. Это можно сделать по-разному: собрать макет, подобрать аналог, смоделировать. Именно моделирование позволяет достаточно быстро и без лишних затрат проверить работоспособность предложенного способа решения проблемы в рамках поставленной задачи.
Существует несколько способов моделирования тепловых процессов протекающих в РЭС: физическое, натурное и математическое [1]. Нас интересует математическое моделирование, а если точнее - компьютерное. Таковым является проведе-
142
ние моделирования в системах автоматизированного проектирования. Большинство систем автоматизированного проектирования при моделировании используют численные методы решения. Наиболее популярным методом является метод конечных элементов.
Программный пакет SolidWorks имеет набор функций необходимых для решения подобных задач. Он, как и большинство других систем автоматизированного проектирования использует конечно элементный метод. В дополнение к этому удобный и интуитивно понятный интерфейс программы позволяет быстро и без лишних манипуляций выполнить нужное действие.
Моделируемым объектом будет выступать чип со следующими геометрическими размерами: 9x9x2 мм, что соответствует его длине, ширине и высоте. В процессе работы чип выделяет тепловую мощность 2 Вт, что соответственно приведёт к существенному перегреву полупроводникового элемента и как следствие к выходу его из строя.
Чтобы избежать данной проблемы необходимо на этапе проектирования оценить перегрев изделия и принять меры по его снижению [2] (рис. 1).
Для снижения величины перегрева будем использовать радиатор размерами 20х10х2 мм. Для оценки эффективности теплоотвода радиатора в качестве материалов были выбраны алюминий и медь.
На первой итерации необходимо оценить перегрев чипа без радиатора. Получив результат, будет принято решение о добавлении радиатора и переходу ко второй итерации. Первым будет проверен радиатор из алюминия. Если перегрев всё равно будет значительным, то будет совершён переход на третью итерацию - медный радиатор.
Оптимальным тепловым режимом для чипа будет перегрев не более 50°С.
143

Рис. 1. Алгоритм проведения моделирования
Исходя из всего вышеперечисленного, необходимо сравнить предоставленные варианты и выбрать наилучший тепловой режим.
Так как тепло будет в большей степени передаваться в сплошной среде (от чипа к радиатору), то уравнение теплопро-
водности находится из: |
|
22 + 22 + 22 + = 0, |
(1) |
Где Т - температура;
Kxx, Kyy, Kzz - коэффициент теплопроводности по x, y, z,кВт/м·К;
Q - источник тепла, кВт/м3.
Выражение (1) связано следующими граничными усло-
виями. Температура имеет вид, при известной температуре зоны: |
|
= ( ), |
(2) |
144 |
|

где ТВ - температура на границе при конвективном теплообмене. При известном тепловом потокеq ,граничное условие
имеет следующий вид[3]: |
|
+ (Т−Т ) + = 0, |
|
||
2 |
+ 2 |
+ 2 |
|
||
2 |
2 |
|
2 |
|
(3) |
где h - коэффициент теплообмена, кВт/м·К; Т - температура на границе, К;
T∞ - температура окружающей среды, К;
q поток тепла кВт/м3, lx, ly, lz, направляющие косинусы; Если имеются тепловые потери за счёт конвекции, следовательно отсутствует отток или приток тепла за счёт теплово-
го потока.
Матрица теплопроводности имеет вид:
( ) = ∫ ( ) ( ) ( ) ( ) + ∫2( ) ( ) ( ) . (4)
Матрица[N(e)] содержит функции формы, причём |
|
||||||
T(e) = [N(e)][T]. |
|
|
(5) |
||||
Все значения коэффициентов теплопроводности связаны |
|||||||
матрицей теплопроводности [D(e)] содержит: |
|
(6) |
|||||
|
|
0 |
0 |
|
|||
( ) = |
( ) |
|
0 |
, |
|
||
0 |
|
|
|||||
|
0 |
|
|
( ) |
|
|
|
|
|
|
(e0) |
|
|
||
|
|
|
|
|
( ) |
|
|
Дифференцируем матрицу [N ] по х, y иz получаем мат- |
|||||||
рицу [В(e)]. Соотношение [В(e)] имеет следующий вид: |
|
||||||
{ } = |
|
|
|
= ( ) . |
|
(7) |
|
|
|
||||||
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
145

Математическое описание теплообмена можно наглядно представить в виде графа. Рассмотрим два варианта теплопередачи.
Первый вариант описывает модель без дополнительных теплоотводов, когда весь теплообмен имеет конвективный характер (рис. 2). Тепловой поток qописывается уравнением (3).
Рис. 2. Граф конвективного теплообмена
Второй вариант теплообмена (рис. 3) описывает модель с дополнительным теплоотводом (радиатором), соответственно теплообмен будет осуществляться не только посредством конвекции, но и кондуктивным способом.
Рис. 3. Граф теплообмена с теплоотводом
Тепловой поток q1 описывается уравнением (1), тепловые потоки q2 и q3 описываются уравнением 3.
Перед моделированием был произведён предварительный расчёт [5]. Были получены следующие результаты: без ра-
146

диатора перегрев составил 15771 К, с радиатором из алюминия 578 К, с радиатором из меди 315,7 К.
Исходя из алгоритма, приведённого на рис. 1, создадим модель чипа зададим параметры моделирования[6]. Начальные параметры моделирования следующие:
1)материал — кремний;
2)температура окружающей среды — 298 К или 25°С.
3)коэффициент конвекции — 90 Вт/м2.
Выделяемая тепловая мощность, как уже говорилось ранее, составляет 2 Вт. Результат моделирования показан на рис. 4.
Как можно наблюдать перегрев чипа составляет 15780К или 15427°С, что составляет критический перегрев элемента. В реальных условиях это привело бы к моментальному разрушению элемента. Необходим радиатор.
Рис. 4. Перегрев чипа
Добавим радиатор из алюминия. Все коэффициенты остаются прежними, добавляется коэффициент теплопроводности алюминия и тепловое сопротивление соединения чипа и радиатора, которое составило 2,857·10-6 К/Вт. Результат моделирования представлен на рис. 5.
147

Рис. 5. Перегрев чипа на радиаторе
Перегрев чипа значительно снизился до 576К или 303°С, но это всё ещё критический перегрев элемента. Необходим радиатор с более высоким коэффициентом теплопроводности.
Изменим материал радиатора на медь. Результат моделирования представлен на рис. 6.
Рис. 6. Перегрев чипа на медном радиаторе
Как видно из рисунка максимальная температура чипа составляет 316К, что эквивалентно 43°С. Исходя из этого можно сделать вывод, что перегрев незначительный и на работу
148
устройства не повлияет, дополнительных мер по снижению температуры не требуется.
Сравнительные данные приведены в таблице.
Таблица
Зависимость температуры чипа от материала радиатора
Материал радиатора |
Моделирова- |
Расчёт, °С |
Разница, % |
|
ние, °С |
|
|
Отсутствует |
15427 |
15 498 |
0,46 |
Алюминий |
303 |
305 |
0,66 |
Медь |
43 |
42,7 |
0,69 |
Исходя из таблицы видно, что при тех же размерах радиатора наиболее выгодным вариантом, в плане отведения тепла, будет радиатор из меди. Расхождение результатов моделирования с расчётом не велико и не превышает 1 %.
Литература
1. Ципина Н. В. Математические методы геометрического представления моделей в САПР/ Н. В. Ципина, Н. Э. Самойленко, С. С. Потапов. // Проблемы обеспечения надежности и качества приборов, устройств и систем Межвузовский сборник научных трудов. Воронеж - 2018. - С. 125-129.
2.Макаров О. Ю. Комплексный подход к решению задач анализа и обеспечения тепловых характеристик при проектировании РЭС/ О. Ю. Макаров, Н. В. Ципина, В. А. Шуваев // Радиотехника. 2017. № 6. С. 166-170.
3.Жуков Н. П., Майникова. Н. Ф., Никулин С. С., Антонов А. О. Решение задач теплопроводности методом конечных элементов: // учебное пособие. Изд.: ФГБОУ ВПО «ТГТУ», 2014.
4.Муратов А. В. Способы обеспечения тепловых режимов РЭС / А. В. Муратов, Н. В. Ципина // учебное пособие Воронежский государственный технический университет. 2007.
5.Дульнев Г. Н. Методы расчёта тепловых режимов приборов/ Г. Н. Дульнев, В. Г. Парфёнов, А. В. Сигалов // Радио и связь. 1990. Москва.- С. 56-58.
149
6.Самойленко Н. Э. Оптимизация конструкций системы охлаждения электронного модуля с помощью системы автоматизированного проектирования SolidWorks / Н. Э. Самойленко, Н. В. Ципина, И. В. Чепрасов, А. Ю. Барагузин, С. С. Потапов.// Проблемы обеспечения надежности и качества приборов, устройств и систем Межвузовский сборник научных трудов.
Воронеж - 2018. - С. 130-138.
7.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
Воронежский государственный технический университет
150
УДК 536.12
Н. В. Ципина, Э. Э. Каграманов, В. С. Стёпин
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ВОЗДУШНОГО ПОТОКА ОХЛАДИТЕЛЬНОГО УСТРОЙСТВА НА СИСТЕМУ
СИММЕРСИОННЫМ ОХЛАЖДЕНИЕМ
Входе исследования рассматривается влияние воздушного потока на систему с иммерсионным охлаждением. Для получения данных применяется специальная лабораторная установка, имеющей возможность регулировки воздушного потока в 3-х режимах. Данная работа проводилась
с целью получить графики зависимости для дальнейших исследований и составлений математических моделей.
Ключевые слова: воздушный поток, иммерсионное охлаждение, лабораторный стенд, температура, теплоотдача, принудительное охлаждение.
Одним их нетрадиционных методов охлаждения является жидкостное охлаждение (иммерсионное охлаждение) с погружением в специальную жидкость (минеральные масла, жидкости на основе фторуглерода или деионизированная вода). Подобный метод является эффективным и может быть актуальным при работе с электронными средствами, имеющими высокие показатели тепловой мощности.
Примером использования иммерсионной жидкости в современных условиях являются высокопроизводительные системы, комплексы для получения криптовалюты и устройства с процессорами типа ASIC. Именно в этих областях на данный момент времени востребована жидкостная система охлаждения.
Как и любая иная система теплоотвода, жидкостное охлаждение зависит от многих параметров: параметры охлаждаемого оборудования, параметры охладительной системы, характеристики используемой жидкости и непосредственно параметры окружающей среды.
Воздушным потоком называют движение воздуха в некоторой среде. Частицы могут перетекать естественным или принудительным образом.
Лабораторная установка состоит из емкости с охладительной жидкостью, насосной системой и радиатором с элементами воздушного охлаждения. Лабораторный стенд представлен на рис. 1.
151

Рис. 1. Лабораторная установка для проведения научно-исследовательских работ в условиях иммерсионного охлаждения
В конструкции стенда имеются вентиляторы, создающие явление воздушного потока принудительным прокачиванием воздуха. Всего в блоке присутствует 6 вентиляторов (рис. 2).
Каждый из них имеет характеристику воздушного потока равную 30 м3/ч.
Рис. 2. Регулируемые вентиляторы лабораторной установки
152

В ходе проводимого эксперимента температура окружающей среды равнялась 28 градусам цельсия. Эксперимент проводился при 3х условиях: 60 м3/ч, 120 м3/ч и 180 м3/ч.
Регистрируемыми параметрами в ходе эксперимента также остаются время стабилизации и температура стабилизации.
Первым этапом исследование является измерение параметров системы при воздушном потоке 60 м3/ч.
Результаты представлены в табл. 1 и на графике, представленном на рис. 3.
Таблица 1
Результаты исследований при 60 м3/ч
Время, мин. |
Температура, |
0 |
28 |
10 |
31 |
20 |
37 |
30 |
38 |
40 |
41 |
50 |
42 |
60 |
43 |
70 |
44 |
80 |
44 |
Рис. 3. График стабилизации температуры при воздушном потоке 60 м3/ч
153

Вторым этапом исследования является измерение параметров системы при воздушном потоке 120 м3/ч.
Результаты представлены в табл. 2 и на графике, представленном на рис. 4.
Таблица 2
Результаты исследований при 120 м3/ч
Время, мин. |
Температура, |
0 |
28 |
10 |
30 |
20 |
32 |
30 |
34 |
40 |
34 |
50 |
34 |
60 |
34 |
70 |
34 |
80 |
34 |
Рис. 4. График стабилизации температуры при воздушном потоке 120 м3/ч
Последним этапом исследования является измерение параметров системы при воздушном потоке 180 м3/ч.
Результаты представлены в табл. 3 и на графике, представленном на рис. 5.
154

Таблица 3
Результаты исследований при 180 м3/ч
Время, мин. |
Температура, |
0 |
28 |
10 |
30 |
20 |
32 |
30 |
32 |
40 |
32 |
50 |
33 |
60 |
33 |
70 |
33 |
80 |
33 |
Рис. 5. График стабилизации температуры при воздушном потоке 180 м3/ч
В ходе исследования были проанализированы полученные данные. При 60 м3/ч температура стабилизируется в течение 70 минут и имеет высокую температуру равную 44 .
При 120 и 180 м3/ч температура стабилизации была достигнута на точке 30 и 50 минут соответственно. При этом температура была практически равна и колебалась в диапазоне
33-34 .
Воздушный поток, действующий на иммерсионную жидкость, оказывает следующее влияние: при низком значение
155
воздушного потока, температура жидкости становится выше, а время стабилизации может достигать больших значений. При высоких значениях теплового потока, температура жидкости понижается, аналогично понижается время стабилизации температуры.
Литература
1.Астахов Н. В., Каграманов Э. Э., Стёпин В. С., Ципина Н. В. Разработка стенда для научно-исследовательских работ в условиях иммерсионного охлаждения // Научная опора Воронежской области. - Воронеж: Воронежский государственный технический университет, 2021. - С. 252-253.
2.Баранов И. А., Каграманов Э. Э., Турецкий А. В., Худяков Ю. В. Разработка лабораторного стенда с датчиком Холла // Проблемы обеспечения надежности и качества приборов, устройств и систем. - Воронеж: Воронежский государственный технический университет, 2019. - С. 70-77.
3.Самойленко Н. Э. Оптимизация конструкций системы охлаждения электронного модуля с помощью системы автоматизированного проектирования SolidWorks / Н. Э. Самойленко, Н. В. Ципина, И. В. Чепрасов, А. Ю. Барагузин, С. С. Потапов // Проблемы обеспечения надежности и качества приборов, устройств и систем Межвузовский сборник научных трудов. Воронеж. − 2018. − С. 130-138.
4.Макаров О. Ю. Комплексный подход к решению задач анализа и обеспечения тепловых характеристик при проектировании РЭС / О. Ю. Макаров, Н. В. Ципина, В. А. Шуваев// Радиотехника. – 2017. – № 6. – С. 166-170.
5.Муратов А. В. Способы обеспечения тепловых режимов РЭС/ Муратов А. В., Ципина Н. В.// учебное пособие ГОУВПО ВГТУ Воронеж – 2007. – 98 С.
6.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
Воронежский государственный технический университет
156
УДК 536.12
Н. В. Ципина, Э. Э. Каграманов, В. С. Стёпин
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ТЕМПЕРАТУРЫ ОКРУЖАЮЩЕЙ СРЕДЫ НА СИСТЕМУ
СИММЕРСИОННЫМ ОХЛАЖДЕНИЕМ
Вданной статье производится анализ температуры окружающей среды и ее влияние на параметры системы с иммерсионным охлаждением. Исследование проводится с использованием специально разработанной лабораторной установки для получения экспериментальных данных в системе
симмерсионным охлаждением. Целью является построение графической модели изменения температуры жидкости для дальнейшего проведения научно-исследовательских работ в сфере иммерсионного охлаждения.
Ключевые слова: иммерсионное охлаждение, лабораторный стенд, температура, теплоотдача.
Одной из главных задач в разработке современной электроники является увеличение производительности систем. Зачастую с повышением производительности возрастает и мощность, что влечет за собой высокие показатели нагрева электронных средств. Без улучшения систем охлаждение, дальнейшее развитие электроники становится невозможным. Кондуктивные методы охлаждения с помощью радиаторов или конвекция по средствам воздушного охлаждения являются методами традиционными, но с развитием требуют более сложных методов реализации.
Актуальность проводимого анализа продиктована возможностью повышения эффективности систем теплоотвода РЭС на основе иммерсионного охлаждения и оптимизации экономической составляющей. Получение результатов экспериментального исследования воздействия параметров окружающей среды в будущем позволит разработать математические методы расчеты характеристик системы охлаждения в зависимости от параметров охлаждаемого электронного средства.
Конструкция лабораторной установки включает в себя 3 функциональных блока: емкость для испытуемого образца, блок охлаждения, а также блок коммутации и электропитания. Емкость является сменным элементом и подбирается в зависи-
157

мости от требуемого объема жидкости или габаритов охлаждаемого блока РЭС
Лабораторная установка представлена на рис. 1.
Рис. 1. Лабораторная установка для исследования иммерсионного охлаждения
Источником теплового излучения является радиоэлектронные элемент на основе транзисторной сборки с мощностью 60 Вт. Данный элемент не может работать без средств теплоотвода и в случае нагрева до 90 градусов Цельсия происходит аварийное отключение.
Иммерсионной жидкостью является жидкость ПАОМ-2. Это полиальфолефиновое масло Российского производства. Объем заливаемой жидкости равен 7 литров.
Температурой окружающей среды называют среднюю температуру окружающей некоторый объект среды.
В случае проведенного исследования, температура окружающей среды была выбрана двух показателей: 20 и 28
градусов Цельсия. |
|
|
В ходе эксперимента при 20 |
|
была получена стабильная |
|
равная 31 за время равное |
|
температура поверхности жидкости |
|
|
158 |
|
|
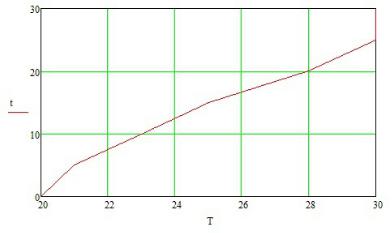
25 минутам. В табл. 1 представлены поэтапные результаты исследования. График стабилизации температурыпредставлен на рис.2.
Таблица 1
Результаты исследования при 20
Время, мин. |
Температура, |
0 |
20 |
5 |
21 |
10 |
23 |
15 |
25 |
20 |
28 |
25 |
30 |
30 |
30 |
Рис. 2. График стабилизации температуры жидкости при температуре окружающей среды 20
Далее было проведено исследование. при температуре окружающей среды равной 28 В ходе эксперимента определено, что температура стабилизировалась на значение 33 . Время стабилизации составило 20 минут. В табл. 2 представлены поэтапные результаты исследования. График стабилизации температуры представлен на рис. 3.
159
Таблица 2
Результаты исследования при 28
Время, мин. |
Температура, |
0 |
28 |
5 |
29 |
10 |
30 |
15 |
31 |
20 |
32 |
25 |
32 |
30 |
32 |
Рис. 3. График стабилизации температуры жидкости при температуре окружающей среды 28
Таким образом, в ходе проведенного эксперимента был получен результат, показывающий, что при большей температуре окружающей среды, температура жидкости стабилизируется быстрее, но ее значение становится выше, чем значение при меньшей температуре окружающей среды.
В ходе проводимых исследований с использованием специально разработанного лабораторного стенда иммерсионного охлаждения были получены экспериментальные данные, позволяющие сделать следующий вывод: чем выше температура окружающей среды, тем быстрее стабилизируется температура
160
иммерсионной жидкости охлаждающий некоторый источник тепла, при этом температура самой жидкости получается выше, чем при более низкой температуре окружающей среды.
Исходя из полученных экспериментальных данных, появляется возможность в дальнейшем произвести теоретическое формирование математических моделей и графиков зависимости тепловых параметров иммерсионной жидкости опираясь на практические результаты.
Литература
1.Астахов Н. В., Каграманов Э. Э., Стёпин В. С., Ципина Н. В. Разработка стенда для научно-исследовательских работ в условиях иммерсионного охлаждения // Научная опора Воронежской области. - Воронеж: Воронежский государственный технический университет, 2021. - С. 252-253.
2.Баранов И. А., Каграманов Э. Э., Турецкий А. В., Худяков Ю. В. Разработка лабораторного стенда с датчиком Холла // Проблемы обеспечения надежности и качества приборов, устройств и систем. - Воронеж: Воронежский государственный технический университет, 2019. - С. 70-77.
3.Самойленко Н. Э. Оптимизация конструкций системы охлаждения электронного модуля с помощью системы автоматизированного проектирования SolidWorks / Н. Э. Самойленко, Н. В. Ципина, И. В. Чепрасов, А. Ю. Барагузин, С. С. Потапов // Проблемы обеспечения надежности и качества приборов, устройств и систем Межвузовский сборник научных трудов. Воронеж - 2018. - С. 130-138.
4.Макаров О. Ю. Комплексный подход к решению задач анализа и обеспечения тепловых характеристик при проектировании РЭС / О. Ю. Макаров, Н. В. Ципина, В. А. Шуваев// Радиотехника. – 2017. – № 6. – С. 166-170.
5.Муратов А. В. Способы обеспечения тепловых режимов РЭС/ Муратов А. В., Ципина Н. В.// учебное пособие ГОУВПО ВГТУ Воронеж – 2007. – 98 С.
Воронежский государственный технический университет
161
УДК 621.396.62
И. С. Бобылкин, Э. Э. Каграманов, И. А. Федотова, В. С. Стёпин
СИСТЕМА УПРАВЛЕНИЯ ПЕШЕХОДНЫМ ПЕРЕХОДОМ НА ОСНОВЕ РАДИОПЕЛЕНГАЦИИ СОТОВОГО ТЕЛЕФОНА
Актуальность проводимого исследования в данной области заключается в непрерывном увеличении дорожного трафика, ведущее за собой создание заторов и снижение безопасности дорожного движения. Модернизация системы регулирования является самым эффективным способом улучшения дорожной обстановки в настоящее время.
Предлагаемым способом решения данной проблемы является разработка новой системы контроля дорожного трафика, основанной на радиопеленгации сотовых телефонов пешеходов и их последующей регистрации в системе контроля как участников дорожного движения.
Ключевые слова: дорожное движение, светофор, пеленгация, пешеход, сотовая связь, сотовый телефон, GSM 1800.
При анализе современных системы контроля дорожного трафика возникают некоторые проблемы: дороговизна, сложность системы и низкая эффективность. Старые же системы не удовлетворяют потребностям мобильности в крупных городах. Одним из важных участников дорожного движения являются пешеходы.
Целью разработки является создание безопасных условий перехода оживленных дорог, а также минимизация вероятности создания заторов путем использования системы идентификации участников дорожного движения: «ТранспортПешеход», - которая строится на основе радиопеленгации сотовых телефонов пешеходов и их последующей регистрации, как участников дорожного движения.
Для исследования берется схема пешеходного перехода на двухполосной дороге, представленная на рис. 1.
162

Рис. 1. Схема пешеходного перехода
На данном участке светофор дает разрешающий сигнал для машин на 1 минуту. Далее загорается желтый сигнал на 3 секунды и следом красный на 30 секунд. Проблема заключается в том, что периодически пешеходы отсутствуют и машины простаивают. Это грозит образованием заторов на данном участке. Использование устройства идентификации пешеходов позволяет избавиться от простоя транспорта. Схема установки и работы устройства представлена на рис. 2.
Рис. 2. Устройство идентификации пешеходов на переходе
163

Устройство идентификации состоит из двух антенных устройств, каждое из которых направленно на одну из зон перед пешеходным переходом, блоком сканирования и блоком управления светофора.
Антенное устройство является направленным и имеет узкую диаграмму направленности в азимутальной плоскости. Сигнал антенны переходит через приемник на аналогоцифровой преобразователь, с которого подключается в блок дискретного преобразования Фурье. Последний блок соединен с вычислителем пеленга, который вычисляет наличие источника радиоизлучения в зоне покрытия. Диапазон частот соответствует стандарту GSM 1800.
С вычислителя пеленга на блок управления поступает сигнал о начале пешехода в зоне сканирования. Начинается отсчет переключения светофора. Обязательным условием является минимальный интервал переключения светофора на разрешающий сигнал для пешеходов 1 минута. Функциональная схема устройства представлена на рис. 3.
Рис. 3. Функциональная схема устройства идентификации пешеходов
Алгоритм работы блока управления представлен на рис. 4.
164

Рис. 4. Алгоритм работы блока управления
В результате не происходит переключения пешеходного светофора на разрешающий сигнал без наличия на нем пешехода с сотовым телефоном.
Данная методика может не только позволить эффективно разгрузить дорожный трафик, но и использоваться для создания систем безопасности на железнодорожных магистралях, дорожной инфраструктуре, контроле передвижения на предприятиях и в других областях, где необходимо идентифицировать присутствие человека. На основе взаимодействия с сотовой сетью появляется возможность реализации собственной инфраструктуры нахождения людей, как объектов радиоизлучения, которая может эффективно использоваться сотрудниками МЧС и силовых структур.
Литература
1. Андреев Р. Н., Антиликаторов А. Б., Разинкин К. А., Худяков Ю. В. Концептуальные подходы к реализации алгоритма управления адаптивной антенной решеткой и ее отдельных элементов для оптимизации систем связи с подвижным объектом // Радиотехника. 2017. № 6. С. 149-152.
165
2.Федотова И. А., Каграманов Э. Э., Самодуров А. С. Обзор микрополосковых антенн для работы в миллиметровом диапазоне 5G // Проблемы обеспечения надежности и качества приборов, устройств и систем. − Воронеж: Воронежский государственный технический университет, 2019. − С. 55-66.
3.Каграманов Э. Э., Бобылкин И. С., Никитин Л. Н. Мобильная логопериодическая антенна // Проблемы обеспечения надежности и качества приборов, устройств, систем. 2019. С. 67-70.
4.Чирков О. Н., Пашуева И. М., Каграманов Э. Э. Оценка канала связи с MIMO-OFDM системы обмена данными между транспортными средствами на основе сотовой сети с сильными помехами // Вестник Воронежского государственного технического университета. 2019. Т. 15. № 6. С. 61-66.
5.Бобылкин И. С., Макаров О. Ю. Оптимизация тепловых характеристик при проектировании конструкций радиоэлектронных средств // Труды международного симпозиума надежность и качество. 2013. Т. 2. С. 121-122.
6.Муратов А. В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А. В. Муратов, О. Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2020. – С. 179.
Воронежский государственный технический университет
166
ЗАКЛЮЧЕНИЕ
Работы, входящие в данный сборник, посвящены различным вопросам и задачам обеспечения и повышения качества и надежности радиоэлектронных устройств, приборов, комплексов и систем, программно-технических систем и комплексов, освещают вопросы разработки соответствующих методик, моделей, алгоритмов, методов проектирования, анализа и оценки показателей качества и надежности, отражают результаты практических и теоретических исследований, проектных работ, проведенных в вузах и предприятиях Воронежа. Опубликованные статьи отражают современный уровень и перспективные направления в области создания и производства высоконадежных радиоэлектронных средств, технических и программнотехнических систем, имеют прикладную направленность и охватывают широкий круг вопросов, связанных с проектированием, испытаниями, изготовлением и эксплуатацией данного класса устройств и систем.
167
СОДЕРЖАНИЕ
Введение……………………………………………………… 3
Ащеулов А.В., Чирков О.Н.
Принцип работы и конструкторское исполнение устройства пробуждения с отслеживанием фаз сна…...………………………………………………………… 4
Пухов Д.А., Суворин А.В., Бугаев А.В., Ашуркин В.Д.,
ВасильченкоД.В.,РомащенкоМ.А.
Разработка модулей калибровки комплекса оценки влияния ЭМП на электронные средства……………………. 8
ТурецкийА.В.,ЗубковаЕ.А.
Охлаждение чипа микропроцессора………………………... 13
Ижокина Т.Д., Свиридова И.В., Хорошайлова М.В.,
СвиридоваО.В.
Анализ ветровой нагрузки и расчет для антенны базовой станции………………………………………..……………… 25
Костюков А.С., Бобылкин И.С., Затонский А.А., Елкин
Д.Р., Ломакин Н.Р.
Устройство подсветки автомобильной дороги в темное время суток…………………..……….………………………. 32
Костюков А.С., Середин Б.А., Хрипунков А.П., |
|
|||||
Ломакин Н.Р., Хромых Н.А. |
|
|
|
|
||
Блок управления вентиляторами компьютера……………. |
36 |
|||||
Середин Б.А., Турецкий А.В., Чирков О.Н., |
|
|||||
Хрипунков А.П., Филатов М.А. |
|
|
|
|
||
Функциональные |
возможности |
измерителя |
ёмкости |
|
||
и ЭПС конденсаторов…………………………...…………… |
41 |
|||||
Турецкий А.В., Чирков О.Н., Середин Б.А., |
|
|||||
Хрипунков А.П., Филатов М.А. |
|
|
|
|
||
Конструкторское исполнение измерителя ёмкости и ЭПС |
|
|||||
конденсаторов………….……………………………………. |
50 |
|||||
Чирков О.Н., Калинин О.С. |
|
|
|
|
||
Конструкторское |
исполнение |
охранного |
устройства |
|
||
на микроконтроллере………………………………………… |
56 |
|||||
Сумин Е.Д., Ромащенко М.А., Свиридова О.В. |
|
|||||
Разработка |
методики поиска |
соответствующего |
|
|||
количества битов избыточности для аналого-цифрового |
|
|||||
преобразователя с регистром последовательной аппроксимации |
65 |
|||||
|
|
168 |
|
|
|
|
Макаров О.Ю., Богомазов В.Е. |
|
Исследование схем энергосбережения в облачной сети |
|
радиодоступа……………………………………………… |
71 |
Турецкий А.В., Щипелев Р.Н. |
|
Методика повышения надежности бортовой РЭА |
|
многоразовых ракетных ускорителей………………………. |
77 |
Чирков О.Н., Турецкий А.В., Филатов М.А., Середин Б.А., |
|
ХрипунковА.П. |
|
Конструкторское исполнение прибора для подбора |
|
транзисторов…………………………………………………. |
82 |
Чирков О.Н., Турецкий А.В., Хрипунков А.П., Филатов М.А., |
|
СерединБ.А. |
|
Конструкторское исполнение домашней метеостанции…... |
89 |
Чирков О.Н., Иванов А.В., Ямпольский Д.А., |
|
Кузёмкин А.А. |
|
Устройство бесконтактного измерения температуры тела |
|
для турникета……………………………………….………... |
94 |
Турецкий А.В., Иванов А.В., Худяков Ю.В., |
|
Миненко А.А. |
|
Плавающий автобус…..……………………………………… |
99 |
Костюков А.С., Башкиров А.В., Проценко С.А., |
|
Демихова А.С., Стёпин В.С. |
|
Двухканальное зарядное устройство для NI-MH |
|
аккумуляторов........................................................................... |
108 |
Костюков А.С., Хромых Н.А., Ломакин Н.Р., |
|
Суворин А.В., Пшеницина Ю.М. |
|
Устройство для дистанционного управления……………… |
113 |
Костюков А.С., Мякинин С.П., Ломакин Н.Р., |
|
Пшеницина Ю.М., Хромых Н.А. |
|
Портативный цифровой осциллограф…………………...… |
119 |
Костюков А.С., Антиликаторов А.Б., Хромых Н.А., |
|
Мурачёв Г.И., Бугаев А.В. |
|
Тензорезисторный датчик на основе фоторезисторов…….. |
122 |
Свиридова И.В., Турецкий И.А., Худяков Ю.В. |
|
Аквариумный автомат……………………………………….. |
126 |
169
Чирков О.Н., Добриков А.Д.
Архитектура управляющей информационной системы киберассистента………………………………………………
Астахов Н.В., Каграманов Э.Э., Стёпин В.С.,
Ципина Н.В.
Разработка стенда для научно-исследовательских работ в условиях иммерсионного охлаждения………………………
Курганский М.А., Ципина Н.В.
Разработка светодиодного куба……………………………...
Ципина Н.В., Самойленко Н.Э., Сурмин Н.Ф.
Моделирование и оптимизация теплового режима конструкции РЭС……………………………………………..
Ципина Н.В., Каграманов Э.Э., Стёпин В.С.
Исследование влияния воздушного потока охладительного устройства на систему с иммерсионным охлаждением……
Ципина Н.В., Каграманов Э.Э., Стёпин В.С.
Исследование влияния температуры окружающей среды на систему с иммерсионным охлаждением…………………
Бобылкин И.С., Каграманов Э.Э., Федотова И.А.,
Стёпин В.С.
Система управления пешеходным переходом на основе радиопеленгации сотового телефона………………………..
Заключение…………………………………………………...
170
132
137
140
142
151
157
162
167
Научное издание
ПРОБЛЕМЫ ОБЕСПЕЧЕНИЯ НАДЕЖНОСТИ И КАЧЕСТВА ПРИБОРОВ, УСТРОЙСТВ И СИСТЕМ
Сборник научных трудов
В авторской редакции
Компьютерный набор И. В. Свиридовой
Подписано к изданию 18.10.2021.
Объем данных 6,4 Мб.
ФГБОУ ВО «Воронежский государственный технический университет»
394026 Воронеж, Московский просп., 14