

Типы конечных элементов
Наиболее очевидная классификация элементов предусматривает деление их на одномерные, двумерные и трехмерные. Эти группы могут разделяться в зависимости от того, включают ли узловые перемещения только значения функций (лагранжевы элементы) или также и значения производных (эрмитовы элементы).
Элементы, чаще всего используемые на практике, представлены ниже.
Ферменный элемент – прямолинейный стержень, который присоединяется к другим конструктивным элементам посредством идеальных шарниров (рис. 6). Если к нему не приложены поперечные нагрузки, то он будет испытывать лишь растяжение или сжатие. В каждом узле этого элемента рассматривается по три линейных степени свободы (на рис. 6 они показаны стрелками).
Рис. 6. Ферменный конечный элемент
Прямолинейный брус воспринимает в общем случае все виды нагрузок (растяжение, изгиб в двух плоскостях и кручение). Каждый узел такого элемента (рис. 7) имеет три линейных и три угловых степеней свободы.
Рис. 7. Конечный элемент бруса
Эти элементы моделируют ферменные и пространственные рамные конструкции. В совокупности с пластинчатыми элементами стержневой элемент с шестимерными узлами позволяет моделировать подкрепленные элементы конструкций.
При исследовании плоского напряженного состояния могут быть использованы плоские конечные элементы треугольной и четырехугольной формы (рис. 8).
Рис. 8. Плоские конечные элементы
Узлы этих элементов расположены в углах и имеют по два линейных перемещения вдоль осей в своей плоскости.
Наиболее распространенными формами трехмерных элементов являются тетраэдр и параллелепипед (рис. 9).
Эти элементы играют важную роль при моделировании массивных пространственных конструкций и задач механики грунтов, их узлы размещены в вершинах и обладают тремя линейными степенями свободы.
Рис. 9. Объемные конечные элементы
Пространственные тонкостенные конструкции наиболее просто аппроксимируются пластинчатыми элементами, испытывающими суперпозицию изгибного и мембранного напряженных состояний (рис. 10). Каждый узел таких элементов наделен шестью «инженерными» степенями свободы: тремя линейными перемещениями вдоль осей локальной системы отсчета и тремя углами поворотов вокруг этих осей.
Рис. 10. Пластинчатые элементы
Вследствие своей простоты эти элементы позволяют с достаточной для инженеров точностью аппроксимировать и оболочечные конструкции.
Одной из важных областей применения МКЭ является расчет осесимметричных тел (рис. 11). При моделировании используется осесимметричный конечный элемент.
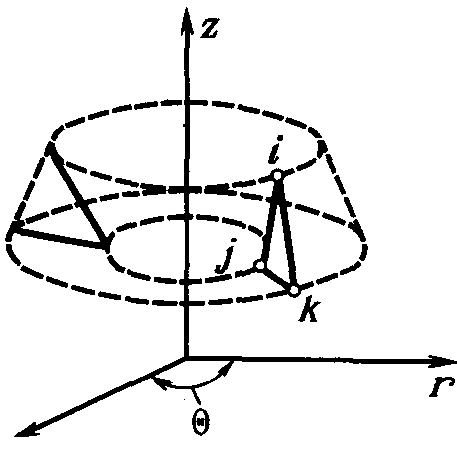
Рис. 11. Осесимметричный конечный элемент
Большое количество прикладных задач относится к этой области: расчет бетонных и стальных резервуаров, сосудов высокого давления, роторов и валов двигателей. Нагрузки также обычно бывают осесимметричными.
Прямой метод жесткости
Уравнение жесткости для элемента записывается в виде линейных алгебраических уравнений:
![]()
где
[k] – матрица жесткости элемента,
{F} – вектор сил и
![]() – вектор смещений для элемента.
– вектор смещений для элемента.
Отдельный элемент
матрицы [k] называется коэффициентом
жесткости элемента и его физический
смысл может быть определен из следующего
условия: если перемещение
![]() полагается
равным единице, а перемещения, отвечающие
остальным степеням свободы, полагаются
равными нулю
полагается
равным единице, а перемещения, отвечающие
остальным степеням свободы, полагаются
равными нулю
![]() ,
значение силы
,
значение силы
![]() равно
равно
![]() .
.
Соотношения между всеми силами и перемещениями для элемента с n степенями свободы имеет вид:
Степени свободы отвечают глобальной системе отсчета. Если соотношения между силами и перемещениями в каждом элементе определены численно, то применение прямого метода жесткости заключается в объединении приведенных соотношений в алгебраическом виде, как требуют условия равновесия и совместности в узлах сопряженных элементов. Это приводит к системе уравнений, связывающих силы и перемещения в узловых точках для ансамбля конечных элементов.
Для иллюстрации этой методики, поясняющей процесс формирования глобальной матрицы жесткости конструкции, выведем уравнения связи между силами и перемещениями в точке q по направлению оси x для конечно-элементной модели рис. 12.
Величины, отвечающие направлению x в узле q обозначим нижним индексом i. Все элементы лежат в плоскости x0y.
Рис. 12. Типичный узел плоской модели
Согласно условиям
равновесия в узле, приложенная нагрузка
![]() равна сумме внутренних сил, действующих
в соответствующих элементах, прилежащих
к узлу. Для пояснения этого на рис. 13
показаны элементы, прилежащие к
рассматриваемому узлу.
равна сумме внутренних сил, действующих
в соответствующих элементах, прилежащих
к узлу. Для пояснения этого на рис. 13
показаны элементы, прилежащие к
рассматриваемому узлу.
Из условия равновесия в направлении x:
![]()
где
![]() – внутренняя сила, действующая в
направлении x в элементе A.
– внутренняя сила, действующая в
направлении x в элементе A.
Подставляя в
последнее уравнение выражения для
внутренних сил
![]() ,
записанных в терминах соответствующих
степеней свободы элемента
,
записанных в терминах соответствующих
степеней свободы элемента
![]() получим:
получим:
![]()
Рис.
13. Анализ равновесия в направлении
![]()
В силу совместности
смещения
![]() для всех элементов одинаковы, поэтому
для всех элементов одинаковы, поэтому
![]()
или
![]()
Рис.
14
![]() обозначены глобальные коэффициенты
матрицы жесткости ансамбля конечных
элементов.
обозначены глобальные коэффициенты
матрицы жесткости ансамбля конечных
элементов.
Схема формирования глобальной матрицы жесткости и вектора узловой нагрузки исследуемой конструкции может быть рассмотрена на следующем примере. На рис. 14, а изображена модель, состоящая из четырех взаимосвязанных элементов.
Для каждого элемента строится локальная матрица жесткости, размерность которой соответствует числу его узловых степеней свободы. Коэффициенты матрицы жесткости размещаются в соответствии с матрицей связи, которая указывает номера узлов элемента при глобальной нумерации. На рис. 14, б показана схема формирования коэффициентов матриц жесткости конструкции и вектора узловой нагрузки. Полуширина ленты B глобальной матрицы жесткости для данного примера равна 4, если в каждом узле рассматривается одна степень свободы (рис. 14, в).