

3. Расчет строительных лебедок
Лебедки представляют собой грузоподъемные механизмы, предназначенные для подъема, опускания или перемещения различных грузов с помощью каната, навиваемого на барабан. Их применяют как самостоятельные механизмы, так и в качестве механизмов кранов, подъемников и других строительных машин.
Лебедки классифицируют:
по назначению – на подъемные (для подъема грузов) и тяговые (для горизонтального перемещения грузов);
по виду привода – на приводные и ручные;
по числу барабанов – на одно-, двухбарабанные и без барабана (с канатоведущим шкивом, рычажные).
3.1. Барабанные лебедки с ручным приводом
Изготавливаются с тяговым усилием 5 ... 80 кН и канатоемкостью барабана 50 ... 200 м. Кинематическая схема монтажной барабанной лебедки приведена на рис. 3.1.
Лебедка состоит из барабана 1, открытых зубчатых передач 3, дискового грузоупорного тормоза 4, смонтированных на параллельных валах, опирающихся на подшипники, закрепленные в боковинах станины 2. Подъем и опускание груза осуществляется вращением рукояток 6. Для увеличения скорости подъема легких грузов служит зубчатый перебор 5, изменяющий передаточное число зубчатой передачи. Безопасность работы обеспечивается дисковым грузоупорным тормозом или храповым механизмом.
Ручные лебедки рассчитаны на работу одного, двух или четырех человек одновременно. При кратковременной (до 5 мин) работе со скоростью ωр = 3 рад/с усилие одного рабочего Р1, на рукоять длиной L = 400 мм принимается до 200 Н, а коэффициент одновременности действия двух человек – 0,8, четырех – 0,7.
3.2. Приводные лебедки
По кинематической связи двигателя с барабаном приводные лебедки разделяются на электрореверсивные и фрикционные. В электрореверсивных лебедках связь между двигателем и барабаном неразмыкаемая жесткая, во фрикционных лебедках она осуществляется с помощью фрикционной муфты.
3.2.1. Фрикционные лебедки
Фрикционные лебедки (рис. 3.2) обеспечивают возможность работы барабанов от одного двигателя, посредством включения фрикционных муфт 14. Такие лебедки, в частности, применяются на одноковшовых строительных экскаваторах с одномоторным приводом.
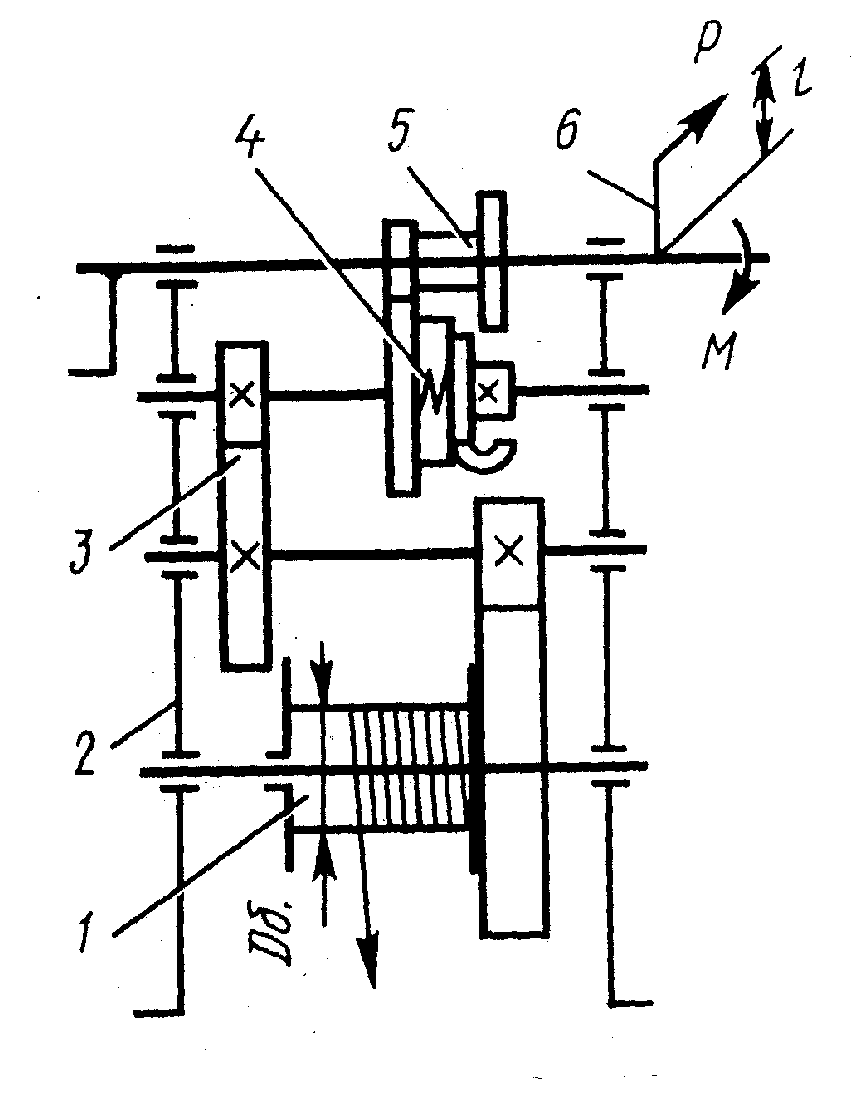
Рис. 3.1. Кинематическая схема монтажной лебедки
с ручным приводом
При применении лебедки в качестве грузоподъемного механизма нереверсируемый двигатель используется только для подъема груза. Опускание груза осуществляется под действием силы тяжести при отсоединении барабана от трансмиссии. Скорость опускания регулируется обычно ленточными нормально замкнутыми тормозами 13. Для предупреждения случайного опускания груза лебедки снабжаются храповыми устройствами 12, связанными с барабанами и управляющими рукоятками.
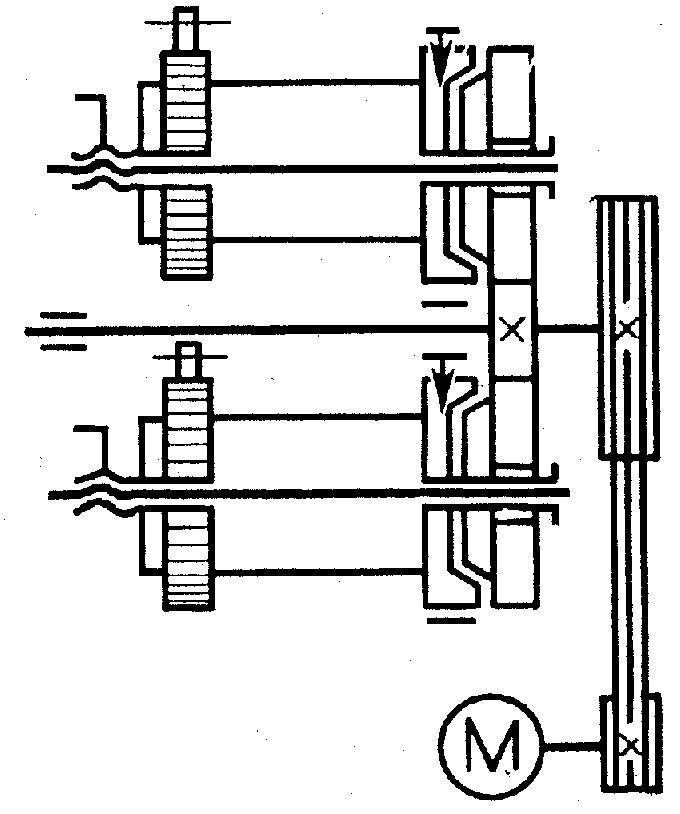
Рис. 3.2. Кинематическая схема
фрикционной двухбарабанной лебедки
3.2.2. Электрореверсивные лебедки
Наиболее часто применяются однобарабанные электрореверсивные лебедки с тяговым усилием 3,2 ... 125 кН при скорости каната 0,1 ... 0,5 м/с и канатоемкости 80 ... 800 м. Кинематическая схема однобарабанной электрореверсивной лебедки приведена на рис. 3.3.
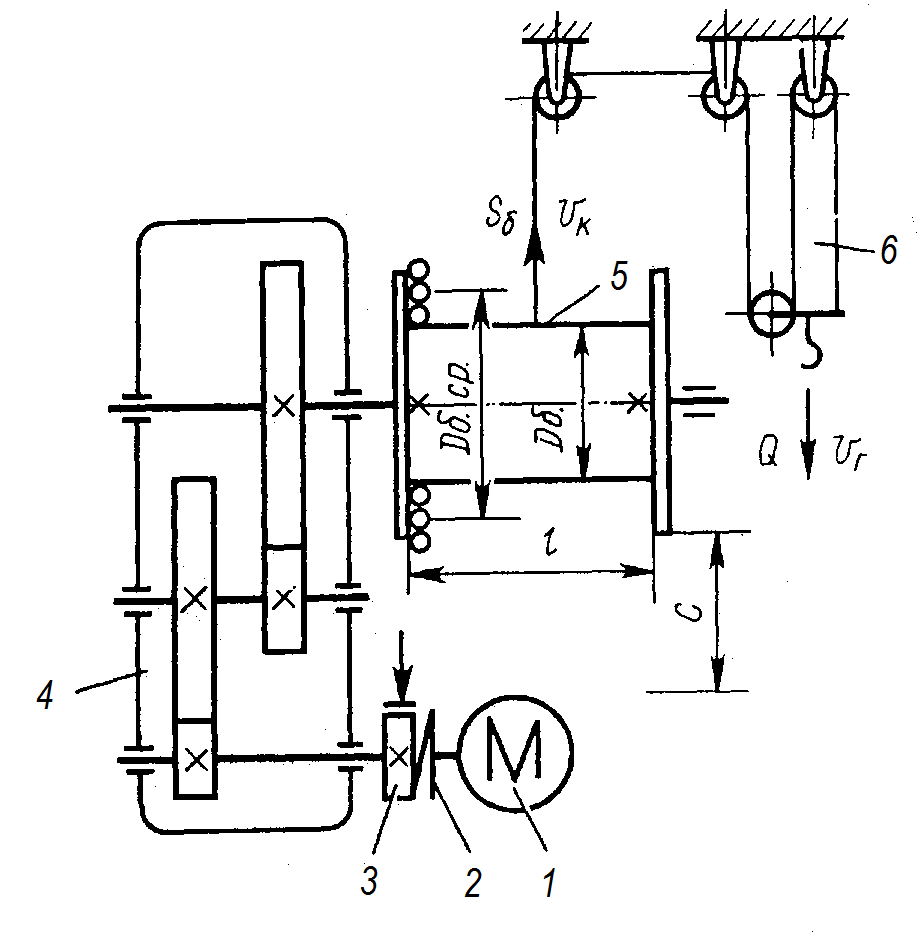
Рис. 3.3. Кинематическая схема
однобарабанной электрореверсивной лебедки
Эта лебедка состоит из электродвигателя 1, упругой муфты 2, тормоза 3, зубчатого редуктора 4, барабана 5 и пусковой аппаратуры, установленных на сварной раме. При работе лебедки закрепляются на фундаменте. В комбинации с полиспастами они используются для подъема различных по массе грузов при выполнении строительно-монтажных работ, а также в качестве механизмов грузоподъемных кранов.
Полиспаст 6 представляет собой систему из двух обойм – подвижной и неподвижной, каждая из которых состоит из нескольких блоков, огибаемых канатом, и предназначенных для выигрыша в силе (силовой полиспаст) или в скорости (скоростной полиспаст). Груз подвешивают к подвижной обойме, а последняя ветвь каната навивается на барабан лебедки. Кратность полиспаста определяется как отношение числа ветвей гибкого органа, на котором подвешен груз, к числу ветвей наматываемых на барабан (для силовых полиспастов), либо как отношение скорости ведущего конца гибкого органа к скорости ведомого (для скоростных полиспастов).
Основными
параметрами электрореверсивных лебедок,
определяющими грузоподъемность, высоту
и скорость подъема груза, мощность
двигателя, надежность тормозного
устройства, являются усилие в канате,
наматываемом на барабан
![]() ,
скорость каната
,
скорость каната
![]() и канатоемкость барабана
и канатоемкость барабана
![]() .
Эти параметры связаны между собой
следующими зависимостями.
.
Эти параметры связаны между собой
следующими зависимостями.
При
подъеме груза через полиспаст усилие
![]() (кН) в ветви каната, наматываемого на
барабан, определяется по формуле
(кН) в ветви каната, наматываемого на
барабан, определяется по формуле
![]() ,
(3.1)
,
(3.1)
где
![]() - сила тяжести груза и обоймы, кН;
- сила тяжести груза и обоймы, кН;
![]() – кратность
полиспаста;
– кратность
полиспаста;
![]() – КПД
полиспаста.
– КПД
полиспаста.
При
небольшом числе блоков
![]() ,
,
где
![]() – КПД одного блока (
= 0,96 ... 0,99);
– КПД одного блока (
= 0,96 ... 0,99);
– число блоков в полиспасте.
Обычно
число блоков равно кратности полиспаста
![]() .
.
Стальной
проволочный канат выбирают по величине
разрывного усилия
![]() >>
>>
![]() ,
при значении коэффициента запаса
прочности по требованиям Ростехнадзора
,
при значении коэффициента запаса
прочности по требованиям Ростехнадзора
![]() = 5,0; 5,5; 6,0 соответственно для легкого,
среднего и тяжелого режимов работы по
подъему грузов (без людей).
= 5,0; 5,5; 6,0 соответственно для легкого,
среднего и тяжелого режимов работы по
подъему грузов (без людей).
Минимально
допустимый диаметр барабана для легкого,
среднего и тяжелого режимов работы
выбирают в зависимости от диаметра
каната
![]() из соотношения
из соотношения
![]() .
.
Скорость ветви каната, наматываемого на барабан, м/с,
![]() .
(3.2)
.
(3.2)
Зависимость
между крутящим моментом на барабане
![]() моментом на приводном валу
моментом на приводном валу
![]() будет
будет
![]() ,
(3.3)
,
(3.3)
где
![]() – передаточное отношение редуктора,
– передаточное отношение редуктора,
![]() – КПД
редуктора (
≈
0,95).
– КПД
редуктора (
≈
0,95).
Канат может навиваться на барабан в один или несколько слоев.
Рабочая длина барабана, м:
при многослойной навивке
![]() ,
(3.4)
,
(3.4)
где – длина каната (канатоемкость), м;
– диаметр каната, м;
– число слоев навивки;
![]() – средний
диаметр навивки, м;
– средний
диаметр навивки, м;
при однослойной навивке (нарезном барабане)
![]() ,
(3.5)
,
(3.5)
где
![]() мм
– шаг навивки, м;
мм
– шаг навивки, м;
длина каната, м, равна
![]() ,
(3.6)
,
(3.6)
где
![]() – высота подъема груза, м;
– высота подъема груза, м;
![]() – запас
каната (2 витка), м.
– запас
каната (2 витка), м.
Крутящий
момент
(кН
· м) и угловая скорость барабана
![]() (рад/с) равны
(рад/с) равны
![]() ,
(3.7)
,
(3.7)
![]() .
(3.8)
.
(3.8)
Мощность, кВт, приводного электродвигателя
![]() .
(3.9)
.
(3.9)
По полученному значению мощности подбирают крановый электродвигатель с продолжительностью включения (ПВ), соответствующей режиму работы механизма.
Частота вращения двигателя равна
![]() .
(3.10)
.
(3.10)