

1.3. Mеханические характеристики двигателей
В ММ используются электрические, электро - гидравлические и пневматические приводы. Тип привода выбирается в зависимости от конкретных условий и в значительной мере определяет конструкцию и внешний вид ММ.
В
Рис. 1.2.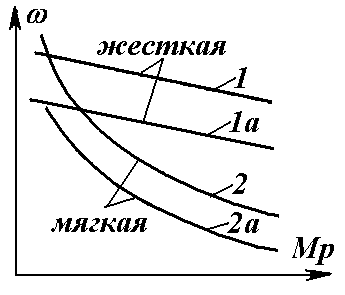
Асинхронные двигатели в приводах ПР практически не применяются из -за сложности и высокой стоимости электронных преобразователей, необходимых для регулирования частоты вращения. Однако в настоящее время ведутся перспективные разработки в этой области.
Зависимость
крутящего момента Мр
двигателя от частоты вращения
![]() называется статической механической
характеристикой двигателя. Если
зависимость Мр(
называется статической механической
характеристикой двигателя. Если
зависимость Мр(![]() )
выражена слабо (пологая характеристика),
то механическая характеристика называется
жесткой. В противном случае
механическую характеристику называют
мягкой.
)
выражена слабо (пологая характеристика),
то механическая характеристика называется
жесткой. В противном случае
механическую характеристику называют
мягкой.
Электродвигатели постоянного тока с независимым (например, от постоянных магнитов) или параллельным возбуждением, имеют жесткую характеристику (рис. 1.2, кривая 1), а двигатели с последовательным возбуждением – мягкую характеристику (рис. 1.2, кривая 2).
Д вигатели
постоянного тока изменяют частоту
вращения при изменении напряжения
питания. Так, например, изменяя напряжение
питания можно получить для двигателя
и характеристику 1, и характеристику
1а.
вигатели
постоянного тока изменяют частоту
вращения при изменении напряжения
питания. Так, например, изменяя напряжение
питания можно получить для двигателя
и характеристику 1, и характеристику
1а.
Электродвигатели характеризуются номинальным крутящим моментом, частотой вращения, мощностью, перегрузкой по моменту, массой, моментом инерции ротора, всего двигателя, габаритными размерами.
В приводах ПР применяются силовые шаговые двигатели, соединяемые со звеньями ММ через какие либо механические передачи. Шаговые электродвигатели преобразуют электрические импульсы, вырабатываемые системой управления двигателя, в угловые или линейные перемещения рабочих органов.
О
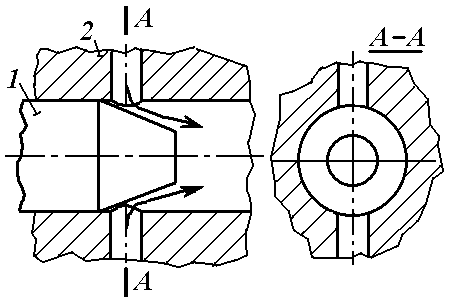
Рис. 1.4.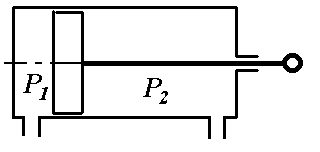
 коло
30 % отечественных ПР имеют привод и
исполнительные двигатели в виде
гидродвигателей линейного перемещения
(гидроцилиндров (рис. 1.3)) и гидродвигателей
вращения. Широкое применение гидродвигателей
обусловлено их высоким быстродействием
и частотой реверсирования, жесткостью
механической характеристики, легкостью
бесступенчатого регулирования скорости,
возможностью работы без промежуточных
механизмов, высокой удельной мощностью
(мощность на единицу массы гидродвигателя),
сравнительно высоким К.П.Д (до 60 %).
коло
30 % отечественных ПР имеют привод и
исполнительные двигатели в виде
гидродвигателей линейного перемещения
(гидроцилиндров (рис. 1.3)) и гидродвигателей
вращения. Широкое применение гидродвигателей
обусловлено их высоким быстродействием
и частотой реверсирования, жесткостью
механической характеристики, легкостью
бесступенчатого регулирования скорости,
возможностью работы без промежуточных
механизмов, высокой удельной мощностью
(мощность на единицу массы гидродвигателя),
сравнительно высоким К.П.Д (до 60 %).
Скорость перемещения выходных звеньев гидродвигателей регулируется дросселями, т.е. устройствами, изменяющими путем перемещения подвижной части 1 (рис. 1.4) относительно корпуса дросселя 2 площадь сечения для прохода жидкости, а значит и сопротивление движению жидкости.
Гидроцилиндр (или пневмоцилиндр) (рис. 1.3) состоит из собственно цилиндра и поршня, перемещающегося под давлением жидкости или газа.
Электрогидравлический привод применяется в роботах средней и большой грузоподъемности или при взрывоопасных условиях работы.