

Учебное пособие 2083
.pdf29
29
Рис. 4.4. Экскаватор ЭМ-302:
1,3 – планирующие звенья; 2,5 – нижняя и верхняя ковшовые рамы; 4 – стойка; 6 – привод ковшовой цепи; 7 – отвальный конвейер; 8 – нижняя платформа;
9 – механизм передвижения; 10 – кабельный барабан
30
30
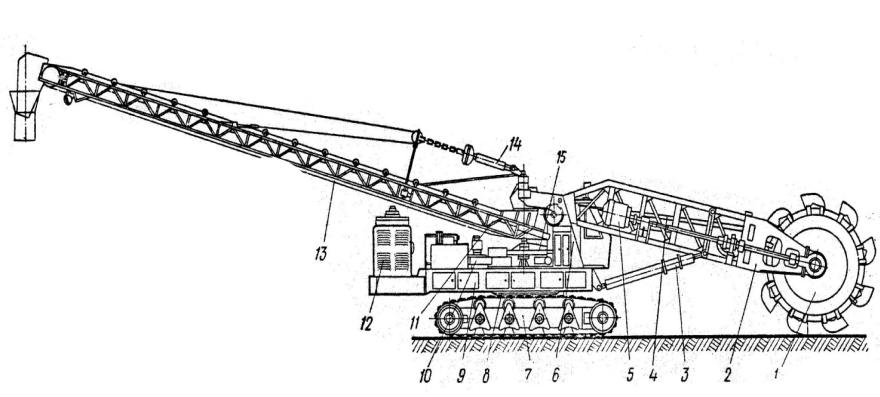
Рис. 4.5. Роторный стреловой экскаватор ЭР-1001: 1 – ротор; 2 – стрела; 3 – гидроцилиндр подъема стрелы;
4 – приемный конвейер; 5 – механизм привода ротора; 6 – пилон;
7– гусеничный ход; 8 – опорно-поворотное устройство; 9 – поворотная платформа; 10 – механизм поворота платформы; 11,13 – нижняя и верхняя секции отвального конвейера; 12 – дизель-генераторная станция; 14,15 – механизмы подъема и поворота отвального конвейера
31
4.3. Порядок проведения работы
При выполнении работы используются учебные кинофильмы, диафильмы и литературные источники [1,2,3,4].
Порядок проведения работы следующий:
1)по кинофильму изучить рабочий процесс экскаваторов непрерывного действия;
2)по диафильмам изучить основные типы экскаваторов непрерывного действия, их общее устройство, типы рабочих органов, устройство исполнительных механизмов.
4.4. Форма отчета
Лабораторная работа № 4
Изучение рабочего процесса, основных типов, общего устройства, исполнительных механизмов и рабочего оборудования строительных экскаваторов непрерывного действия
4.1.Рабочий процесс экскаваторов непрерывного действия
4.2.Основные типы экскаваторов непрерывного действия
4.3.Общее устройство
4.4.Исполнительные механизмы
ТЕМА № 5. ИЗУЧЕНИЕ КИНЕМАТИЧЕСКИХ СХЕМ ПРИВОДОВ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ СТРОИТЕЛЬНЫХ ЭКСКАВАТОРОВ НЕПРЕРЫВНОГО ДЕЙСТВИЯ И РАСЧЕТ ПО НИМ СКОРОСТЕЙ И УСИЛИЙ РАБОЧЕГО ОБОРУДОВАНИЯ
5.1. Цель работы
Целью работы является изучение кинематических схем строительных экскаваторов непрерывного действия типов ЭТ, ЭМ, ЭР с различными видами приводов (одномоторные и многомоторные), а также выработка навыков расчета по ним скоростей и усилий исполнительных механизмов. Данная тема оформляется как лабораторная работа № 5 и как практическое занятие.
5.2. Кинематические схемы
Структура кинематических схем определяется типом привода экскаватора – одномоторный или многомоторный – включает в себя двигатель или группу двигателей, передаточный механизм, состоящий из комбинации различных типов механических передач, гидравлических передач, электрических и комбинированных, а также элементов управления ими в виде муфт, тормозов и аппаратуры управления.
32
Кинематические схемы основных типов строительных экскаваторов непрерывного действия представлены на рис.5.1, 5.2, 5.3, 5.4, 5.5.
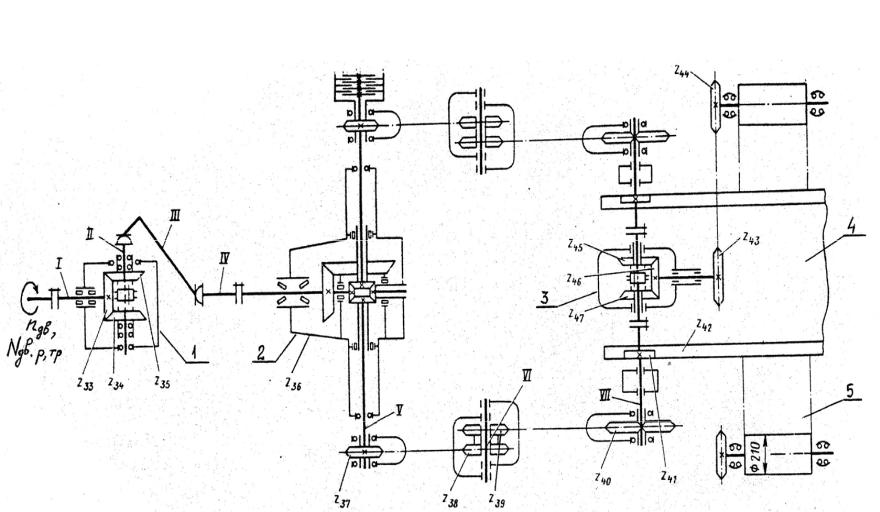
5.3. Расчет скоростей и усилий исполнительных механизмов экскаваторов непрерывного действия (на примере ЭТР-162А, рис. 5.6)
Роторный траншейный экскаватор ЭТР-162А предназначен для рытья траншей глубиной Н = 1,6 м и шириной В = 0,8 м в грунтах до 4-й категории включительно, а также в грунтах сезонного промерзания с глубиной промерзания до 0,7 м.
Рабочее оборудование роторного типа является полуприцепным к базовому тягачу мощностью Nдв. н. = 66 кВт при nдв. н. = 1750 мин-1.
Кинематическая схема привода ротора и транспортера представлена на рис. 5.6.
Вал 1 редуктора отбора мощности непосредственно соединяется с валом двигателя, т. е. n1 = nдв. В процессе копания грунта мощность двигателя Nдв. затрачивается на привод ротора Nдв. р., привод ленточного конвейера (транспортера) Nдв. тр. и на передвижение экскаватора Nдв. пер.. Таким образом,
Соотношения названных составляющих мощности будут определяться категорией разрабатываемого грунта, а именно коэффициентом удельного сопротивления грунта копанию Kкоп (табл. 5.1).
Таблица 5.1
Распределение мощности двигателя экскаватора ЭТР-162А на привод исполнительных механизмов в зависимости от категории грунта
|
Ккоп, МПа |
Nдв. р., кВт |
Nдв. тр., кВт |
Nдв. пер., кВт |
Nдв, кВт |
|
0.1 |
36.3 |
18.4 |
6.3 |
61.0 |
|
|
0.2 |
43.6 |
13.1 |
4.7 |
61.4 |
|
|
0.3 |
46.9 |
10.2 |
3.7 |
60.8 |
|
|
0.4 |
49.5 |
8.5 |
3.1 |
61.1 |
|
|
0.5 |
50.6 |
7.4 |
2.6 |
60.6 |
|
|
0.75 |
53.3 |
5.7 |
1.9 |
60.9 |
|
|
1.0 |
54.2 |
4.7 |
1.5 |
60.4 |
|
|
1.5 |
55.8 |
3.7 |
1.0 |
60.5 |
|
|
2.0 |
56.2 |
3.2 |
0.8 |
60.2 |
|
|
3.0 |
56.4 |
2.6 |
0.5 |
59.5 |
|
|
4.0 |
56.8 |
2.4 |
0.4 |
59.6 |
|
|
5.0 |
57.2 |
2.2 |
0.4 |
59.8 |
|
|
|
|
|
|
|
|
|
33
33
Рис. 5.1. Кинематическая схема экскаватора ЭТЦ-252:
1, 2 – насосы; 3, 4 – гидромоторы; 5 – звездочка; 6 – направляющие колеса
34
34
Рис. 5.2. Кинематическая схема экскаватора ЭТР-223
35
36
35
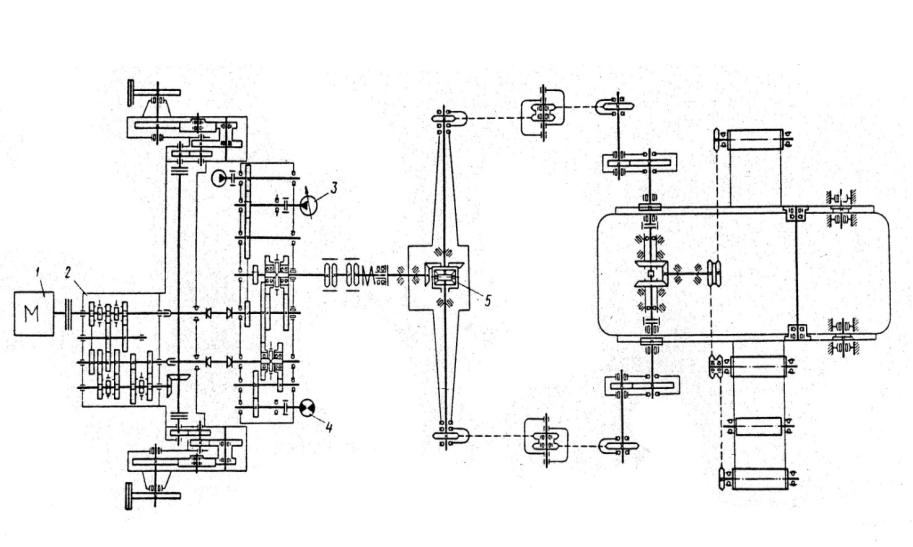
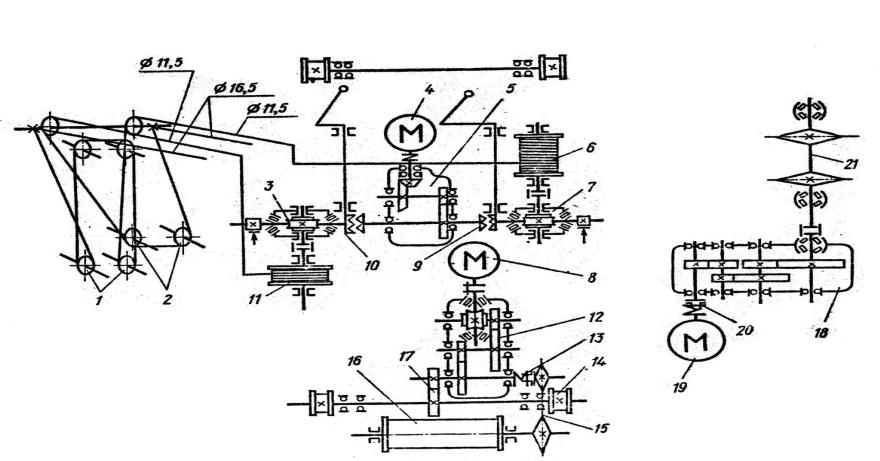
Рис. 5.3. Кинематическая схема экскаватора ЭТР-253А:
1 – дизель-двигатель В-30Б; 2 – раздаточный редуктор; 3 – планетарный механизм поворота; 4 – бортовая передача; 5 – ведущее колесо трактора; 6 – насос; 7 – генератор; 8 – транспортер; 9 – электродвигатель привода транспортера; 10 – ротор; 11 – электродвигатель привода ротора
36
36
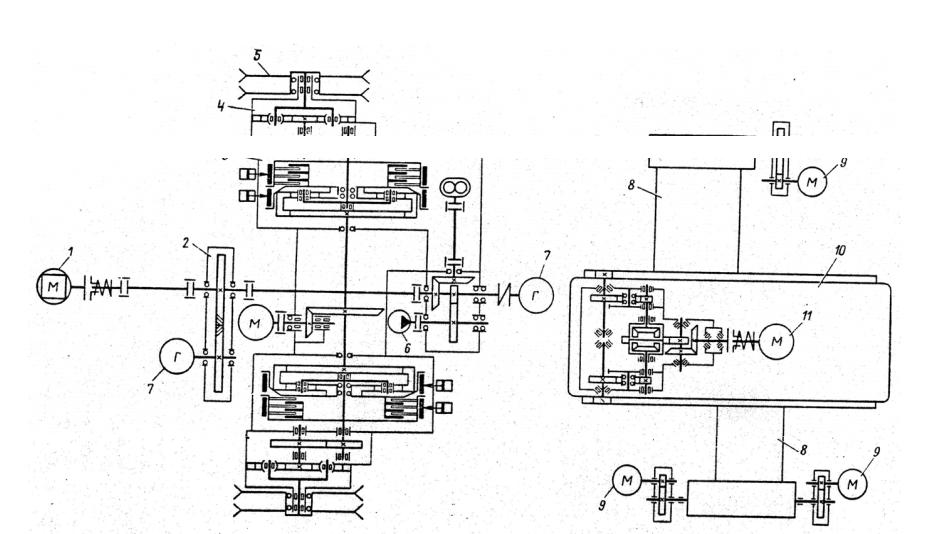
Рис. 5.4. Кинематическая схема экскаватора ЭМ-201А:
1, 2 – полиспасты подъема ковшовой рамы; редукторы: 3, 7 – червячные, 5 – механизма подъема ковшовой рамы, 12 – привода хода,
18 – привода рабочей цепи; 4, 8, 19 – электродвигатели; 9, 10 – муфты; 13 – фрикционная муфта; 14 – ходовое колесо; 16 – кабельный барабан; 20 – муфта предельного момента
37
37
39
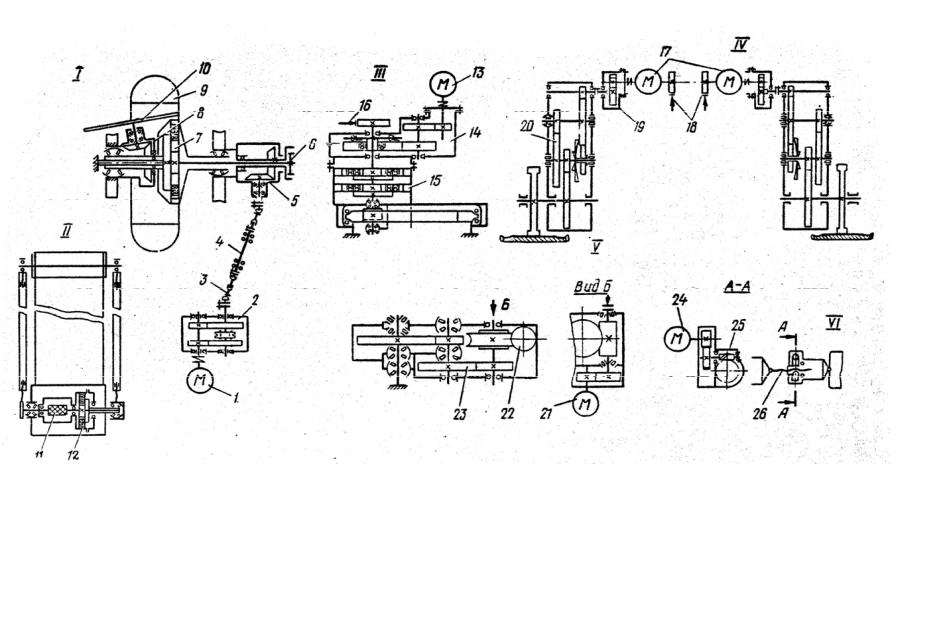
Рис. 5.5. Кинематическая схема механизмов экскаватора ЭР-1001: приводы: I – ротора, II – конвейеров, III – поворота платформы,
IV - гусеничного хода, V – поворота отвального конвейера, Рис. 5.4. Кинематическая схема экскаватора ЭМ-201А:
VI – подъема отвального конвейера; 1, 11, 13, 17, 21, 24 – электродвигатели; 1, 2 – полиспасты подъема ковшовой рамы; редукторы: 3, 7 – червячные, 2 – коробка передач; 3 – шарнир; 4 – карданный вал;
5 – механизма подъема ковшовой рамы, 12 – привода хода, редукторы: 5, 8 – конические; 7, 12, 15 – планетарные;
18 – привода рабочей цепи; 4, 8, 19 – электродвигатели; 9, 10 – муфты; 13 – фрикционная муфта; 14, 19, 20 и 23 – цилиндрические; 22, 25 – червячные; 6 – муфта предельного момента; 9 – ротор; 14 – ходовое колесо; 16 – кабельный барабан; 20 – муфта предельного момента
10 – дисковый питатель; 16, 18 – тормоза; 26 – винтовой механизм
38
38
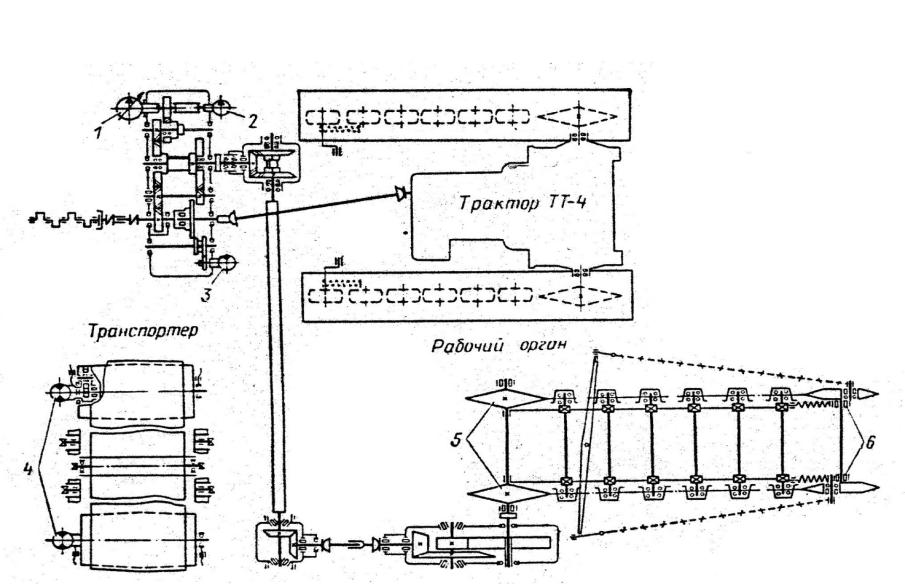
Рис. 5.6. Кинематическая схема привода ротора и транспортера экскаватора ЭТР-162А:
1– редуктор отбора мощности; 2 – раздаточный редуктор; 3 – редуктор транспортера; 4 – ротор; 5 – транспортер