

Учебное пособие 2083
.pdf9
Рис. 1.5. Кинематическая схема рабочего оборудования прямая лопата гидравлического экскаватора
Рис. 1.6. Кинематическая схема рабочего оборудования обратная лопата гидравлического экскаватора
1.2.4.3. Рабочее оборудование драглайн
Экскаватор с этим оборудованием (рис. 1.4), как и обратная лопата, применяется для разработки грунта ниже уровня стояния машины, но с большими
значениями Нк и Rкс.
Рабочее оборудование (рис. 1.4) включает в себя решетчатую стрелу 1, ковш с упряжью 2, блочно-роликовое направляющее устройство (наводку) 5 для строгого наведения тягового каната 3 на барабан тяговой лебедки 6.
10
Механизмами управления рабочим оборудованием являются тяговый, подъемный и стрелоподъемный. Тяговый механизм включает в себя лебедку 6, канат 3 и непосредственно обеспечивает процесс копания грунта путем протягивания ковша по откосу забоя. Подъемный механизм включает в себя лебедку 7, канат 4 и совместно с тяговым обеспечивает подтягивание ковша вдоль стрелы к головным блокам для выгрузки грунта и заброса ковша для копания. Стрелоподъемный механизм управляет стрелой и включает в себя лебедку 9 и полиспаст 8. Разработка грунта осуществляется работой тягового (Vт) механизма путём протягивания ковша по откосу забоя.
1.2.4.4. Прямая и обратная лопаты гидравлического экскаватора
Области применения те же, что и у канатного экскаватора. Рабочее оборудование прямая (рис. 1.5) и обратная (рис. 1.6) лопаты включают в себя стрелу 1, рукоять 2, ковш 3. Управление поворотом стрелы, рукояти и ковша осуществляется с помощью соответствующих гидроцилиндров 4, 5, 6. В приводе поворота ковша этих оборудований используется рычажно-шарнирный передаточный механизм 7, состоящий из коромысла и шатуна.
1.3. Порядок проведения работы
При выполнении работы используются учебные кинофильмы, плакаты, диафильмы и литературные источники [1, 2, 3].
Порядок проведения работы следующий:
1.По кинофильму изучить рабочий процесс одноковшового экскаватора с различными видами сменного рабочего оборудования.
2.По плакатам и диафильмам изучить общее устройство одноковшовых канатных и гидравлических экскаваторов, их механизмы и рабочее оборудование.
3.Вычертить принципиальные схемы экскаваторов с основными видами землеройного рабочего оборудования.
1.4.Форма отчёта
Лабораторная работа № 1
Изучение рабочего процесса, общего устройства, исполнительных механизмов и рабочего оборудования одноковшовых строительных экскаваторов.
1.1.Рабочий процесс одноковшового экскаватора
1.2.Общее устройство одноковшового экскаватора
1.3.Основные исполнительные механизмы одноковшового экскаватора
1.4.Рабочее оборудование одноковшового экскаватора
1.4.1.Прямая лопата канатного экскаватора
1.4.2.Обратная лопата канатного экскаватора
1.4.3.Рабочее оборудование драглайн
1.4.4.Прямая и обратная лопаты гидравлического экскаватора
11
ТЕМА № 2. ИЗУЧЕНИЕ СТРУКТУРНЫХ СХЕМ ПРИВОДОВ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ И ГИДРАВЛИЧЕСКОГО ОБОРУДОВАНИЯОДНОКОВШОВЫХСТРОИТЕЛЬНЫХЭКСКАВАТОРОВ
2.1. Цель работы
Целью работы является изучение структурных схем приводов исполнительных механизмов и гидравлического оборудования одноковшовых строительных экскаваторов. Данная тема оформляется как лабораторная работа.
2.2. Общие сведения по работе
2.2.1. Структурные схемы приводов исполнительных механизмов
Структурная схема определяется типом привода экскаватора (одноили многомоторный), но обязательно включает следующие элементы – источник механической энергии (двигатель), передаточные механизмы (трансмиссию) и механизмы управления (муфты, тормоза).
2.2.1.1. Структурная схема привода исполнительных механизмов
одномоторного экскаватора
Данный тип привода используется только у канатных экскаваторов. Его обязательными элементами являются (рис. 2.1): двигатель «Д»; главный редуктор «ГР», обслуживающий работу всех исполнительных механизмов; реверсивный механизм «РМ», необходимый для нормального функционирования ходового «ХМ» и поворотного «ПовМ» исполнительных механизмов. В качестве механизмов управления рабочим оборудованием «МУРО» у канатного экскаватора могут быть подъемный «ПодМ», стрелоподьемный «СподМ», напорный «НМ» (у прямой лопаты) или тяговый «ТМ» (у обратной лопаты и драглайна).
Управление работой исполнительных механизмов от одного силового двигателя осуществляется с помощью управляемых муфт (кулачковых, зубчатых, фрикционных) и тормозов.
ХМ
РМ Д  ГР
ГР 
 Пов
Пов
МУРО ПодМСподМ
НМ-ТМ
Рис. 2.1. Структурная схема привода исполнительных механизмов одномоторного экскаватора
12
2.2.1.2. Структурная схема привода исполнительных механизмов многомоторного экскаватора
Схема многомоторного привода исполнительных механизмов используется на всех гидравлических экскаваторах и на некоторых канатных.
Вкачестве приводных двигателей «Д» (рис. 2.2) используются реверсивные электродвигатели у канатных экскаваторов или реверсивные гидродвигатели (гидромоторы и гидроцилиндры) у гидравлических экскаваторов.
Вкачестве передаточных механизмов «ПМ» применяются открытые или закрытые (в виде редукторов) различные механические передачи.
ХМ
Д ПМ ИМ ПовМ
МУРО
Рис. 2.2. Структурная схема привода исполнительных механизмов многомоторного экскаватора
Привод элементов рабочего оборудования (ковша, рукояти, стрелы) у гидравлических экскаваторов осуществляется с помощью гидроцилиндров.
2.2.2. Гидрооборудование одноковшового гидравлического экскаватора
Гидрооборудование экскаватора можно разделить на следующие группы: силовое, аппаратуру управления и вспомогательное.
К силовому оборудованию относятся:
1)насосы;
2)гидродвигатели – гидромоторы и гидроцилиндры. К аппаратуре управления относятся:
1)регулирующие устройства (для регулирования давления – предохрани-
тельные и редукционные клапаны; для регулирования направления потока обратные клапаны; для регулирования расхода жидкости – дроссели);
2) распределительные устройства (гидрораспределители) для управления потоком рабочей жидкости.
Вспомогательное гидрооборудование включает: гидробаки, фильтры, охладители, трубопроводы (жесткие и гибкие РВД – рукава высокого давления).
В качестве рабочих жидкостей применяются: масло веретенное АУ (от - 40° С до +80° С), масло индустриальное ИС-30 (от +5° С до +50° С) и другие марки масел.
2.3. Порядокпроведенияработы
При выполнении работы используются учебные плакаты, гидравлический стенд, макеты и литературные источники [1,2,3].
Порядок проведения работы следующий:
13
1.По плакатам изучить структурные схемы привода исполнительных механизмов одноковшовых экскаваторов.
2.По плакатам и стенду изучить элементы гидрооборудования одноковшовых гидравлических экскаваторов.
2.4. Форма отчета
Лабораторная работа № 2
Изучение структурных схем привода исполнительныхмеханизмовигидравлическогооборудованияодноковшовыхстроительныхэкскаваторов.
2.1.Структурныесхемыприводовисполнительныхмеханизмовэкскаваторов
2.2.Гидрооборудование одноковшового гидравлического экскаватора
ТЕМА № 3. ИЗУЧЕНИЕ КИНЕМАТИЧЕСКИХ
ИГИДРАВЛИЧЕСКИХ СХЕМ ПРИВОДОВ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ ОДНОКОВШОВЫХ СТРОИТЕЛЬНЫХ
ЭКСКАВАТОРОВ И РАСЧЕТ ПО НИМ СКОРОСТЕЙ
ИУСИЛИЙ РАБОЧЕГО ОБОРУДОВАНИЯ
3.1. Цель работы
Целью работы является дальнейшее углубленное изучение кинематических и гидравлических схем привода исполнительных механизмов одноковшовых экскаваторов и выработка навыков расчета по ним скоростей и усилий исполнительных механизмов. Данная тема оформляется как лабораторная работа №3 и какпрактическоезанятие.
3.2. Кинематические схемы приводов исполнительных механизмов канатныхэкскаваторов
Кинематическая схема одномоторного канатного экскаватора Э0-5116 с прямой лопатой приведена на рис. 3.1.
Кинематические схемы подъемного и тягового механизмов экскаватора с оборудованием обратная лопата и драглайн – соответственно на рис. 3.2 и 3.3.
Характеристики зубчатых колес, звездочек цепных передач и барабанов лебедок приведены в табл. 3.1, 3.2, 3.3.
|
|
|
Характеристика зубчатых колес |
|
|
|
Таблица 3.1. |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||
Параметры |
|
|
|
|
Позиция по рис. 3.1, 3.2, 3.3 |
|
|
|
|
|||||||
|
3 |
4 |
5 |
9 |
10 |
14к |
14ц |
15 |
16 |
|
17 |
|
18 |
19 |
28 |
29 |
Число зубьев |
20 |
91 |
87 |
63 |
15 |
25 |
34 |
14 |
34 |
|
82 |
|
13 |
20 |
18 |
- |
(z) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль (m), |
10 |
10 |
10 |
10 |
22 |
22 |
18 |
18 |
18 |
|
18 |
|
24 |
24 |
14 |
14 |
мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14
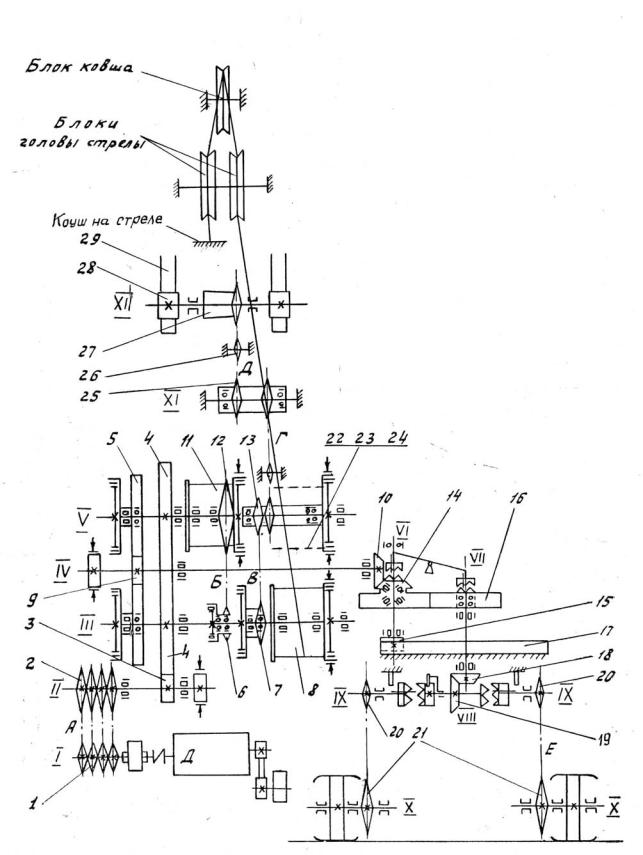
Рис. 3.1. Кинематическая схема экскаватора ЭО-5116 с прямой лопатой: А, Б, В, Г, Д, Е – цепные передачи;
I…ХII – валы
15
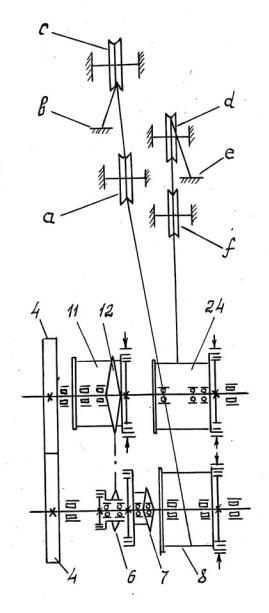
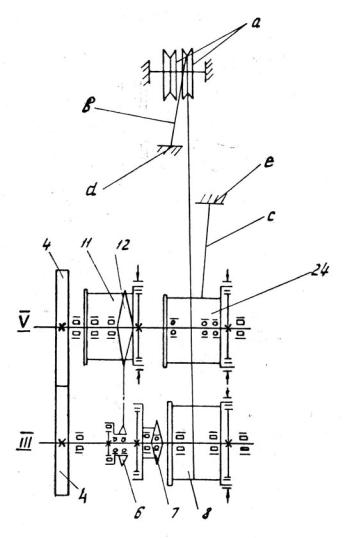
Рис. 3.2. Кинематическая схема подъемного и тягового механизмов экскаватора ЭО-5116
соборудованием обратная лопата:
а– блок на передней стойке;
в– коуш на передней стойке;
с– блок рукояти;
d – блок ковша; е – коуш на стреле; f – блок на стреле
16
Рис. 3.3. Кинематическая схема подъемного и тягового механизмов экскаватора ЭО-5116 с оборудованием драглайн:
а– головные блоки стрелы;
в– подъемный канат;
с – тяговый канат; d – к подвеске ковша; е – к ковшу
|
Характеристика звездочек цепных передач |
Таблица 3.2. |
|||||||||
|
|
|
|
||||||||
Параметры |
|
|
|
Позиция по рис. 3.1, 3.2, 3.3 |
|
|
|
||||
|
1 |
2 |
6 |
7 |
11 |
13 |
20 |
21 |
25 |
26 |
27 |
Число зубьев |
17 |
79 |
13 |
16 |
32 |
13 |
9 |
18 |
13 |
7 |
19 |
(z) |
|
|
|
|
|
|
|
|
|
|
|
Шаг (t), |
25,4 |
25,4 |
78,1 |
78,1 |
78,1 |
78,1 |
103,3 |
103,3 |
78,1 |
78,1 |
78,1 |
мм |
|
|
|
|
|
|
|
|
|
|
|
|
17 |
|
|
Таблица 3.3. |
|
|
Характеристика барабанов лебедок |
|
Позиция |
|
Диаметр |
по рис. |
Наименование барабана |
(по дну |
3.1, 3.2, |
|
канавки), |
3.3 |
|
мм |
11 |
Для подъема стрелы прямой лопаты и драглайна |
420 |
|
Для подъема передней стойки обратной лопаты |
|
23 |
Для подъема крюка крана |
410 |
22 |
Для замыкания грейфера |
480 |
8 |
Для подъема ковша прямой лопаты или ковша драглайна, |
510 |
|
для подъема стрелы обратной лопаты |
|
24 |
Для подтягивания ковша драглайна или ковша обратной |
550 |
|
лопаты |
|
Значения к. п. д. механических передач приведены в табл. 3.4.
Таблица 3.4 Значения к. п. д. механических передач (без учета потерь в подшипниках),
подшипников и блоков полиспаста.
Тип передачи |
В масляной ванне |
|
Открытая |
Зубчатая передача цилиндриче- |
0,95 – 0,97 |
|
0,92 – 0,94 |
скими колесами |
|
|
0,91 – 0,94 |
Зубчатая передача |
0,94 – 0,97 |
|
|
коническими колесами |
|
|
0,9 – 0,93 |
Цепная передача |
0,95 – 0,97 |
|
|
Канатно-блочная |
ηпол=ηблк, где ηбл – к. п. д. |
блока с канатом; |
|
(полиспастная) передача при |
К – число рабочих блоков полиспаста |
||
кратности до 4-х |
|
|
|
Пара подшипников качения |
0,99 – 0,995 |
||
Пара подшипников скольжения |
0,98 – 0,985 |
||
Блок полиспаста на |
|
0,99 |
|
подшипниках качения |
|
|
|
Блок полиспаста на |
|
0,96 |
|
подшипниках скольжения |
|
|
|
Подъемный, стрелоподъемный и тяговый механизмы включают в себя лебедку и канатный полиспаст.
Напорный механизм используется для управления движением рукояти прямой лопаты и может быть:
1) по способу передачи движения на рукоять – зубчато-реечный (кремальерный) и канатно-блочный;
18
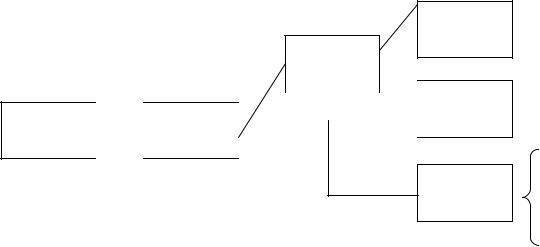
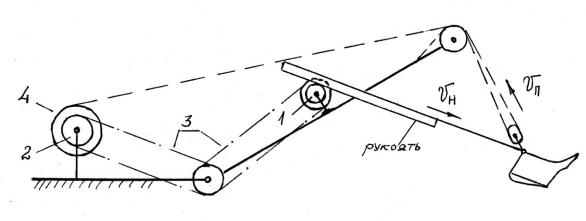
2) по схеме передачи мощности – независимый (рис. 3.4), зависимый и комбинированный (рис. 3 . 5 ) .
При независимой схеме напора подъем ковша (VП) и напор рукояти (VН) осуществляются независимо друг от друга.
По схеме комбинированного напора (рис. 3.5) одновременно с подъемом ковша осуществляется напорное движение рукояти (зависимый напор) и при включении звездочки 9 начинает действовать с помощью цепных передач ветвь независимого напора. Если ветвь независимого напора отключена, то привод напорного механизма работает по схеме зависимого.
3.3. Расчет скоростей и усилий механизмов управления рабочим оборудованием одноковшового канатного экскаватора
3.3.1. Определить скорость Vп и усилие Рп подъема ковша прямой лопаты с независимым напором (по кинематической схеме на рис. 3.1)
Исходные данные:
мощность двигателя – Nдв, кВт;
частота вращения вала двигателя – nдв, мин-1;
угловая скорость – ωдв, с-1;
диаметр подъемного барабана – Dбп, м;
число зубьев звездочек и зубчатых колес – z1, z2, z3,...;
к. п. д. цепной передачи – ηцп, зубчатой – ηзп, пары подшипников – ηподш;
кратность подъемного полиспаста – n, число рабочих блоков полиспаста – к; к. п. д. блока – ηбл.
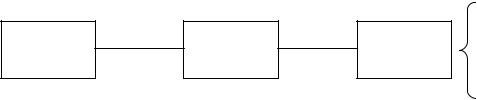
Рис. 3.4. Кинематическая схема независимого напорного механизма: 1 – напорный механизм;
2 – звездочка (барабан) привода напора;
3 – цепная передача;
4 – подъемный барабан