

Автоматизированное проектирование электропривода. лабораторный практикум. Фурсов В.Б
.pdfЛАБОРАТОРНАЯ РАБОТА №3
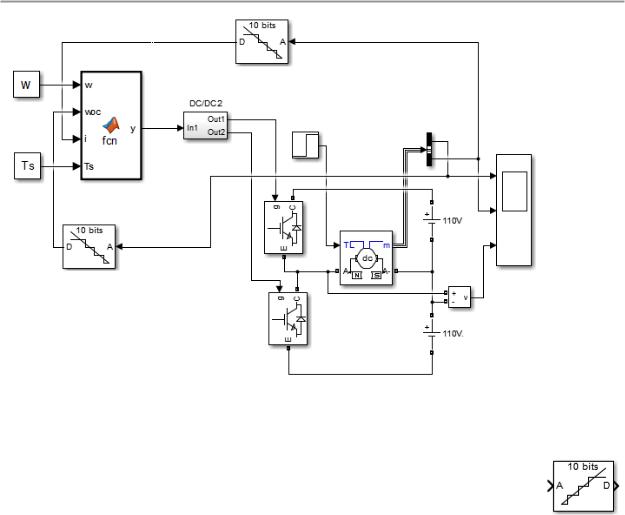
Скорость (100 рад/с и 1 рад/с), ток и напряжение в импульсной системе с аналогоцифровыми преобразователями:
Реализация полученного контроллера осуществляется программно.
60
ЛАБОРАТОРНАЯ РАБОТА №3
ДОПОЛНЕНИЕ 2
Аналого - цифровой преобразователь (IdealADC)
Для моделирования идеального аналого-цифрового преобразователя.
Библиотека
Simulink Extras (Расширения Simulink)
Описание
Идеализированное квантование для линейного аналого-цифрового преобразователя. Есть 2N возможных кодов цифрового выхода для N-разрядного преобразователя. Каждое значение представляет собой равную долю от общего диапазона аналогового сигнала с шагом в один бит (LSB 1). 1 LSB = (Vmax - Vmin) / 2 ^ бит. Середина этих шагов соответствует фактическому значению и ошибка квантования не больше, чем 1/2 LSB в диапазоне полной шкалы (FSR). Отметим, что первые и последние шаги в диапазоне преобразователя по ширине только 1/2 LSB, полный диапазон шкалы преобразователя равен (2N - 1) шагов. Нижний переход FSR происходит при Vmin + 1/2 LSB, верхний переход FSR происходит при Vmax - 3/2 LSB. Время преобразования в этой модели равно нулю. Комплект "Выходные отрицательные значения", чтобы иметь отрицательные выходные значения для отрицательных напряжений (не распространяется на неуказанные типы выходных данных).
Параметры
Number of converter bits: (Число преобразуемых бит) – разрядность АЦП. Реальные АЦП имеют разрядность обычно от 8 до 16.
61
ЛАБОРАТОРНАЯ РАБОТА №3
Min input voltage at low output: (минимальное входное напряжение соответствующее нижнему выходу) – уровень минимального напряжения на входе АЦП. Обычно эта величина по модулю не превышает -10 В, но может быть и нулем.
Max input voltage at 2^n output (unreachable): (максимальное входное напряжение соот-
ветствующее 2n выходу (не достигается)) - уровень максимально допустимого напряжения на входе АЦП. Обычно эта величина не превышает 10 В.
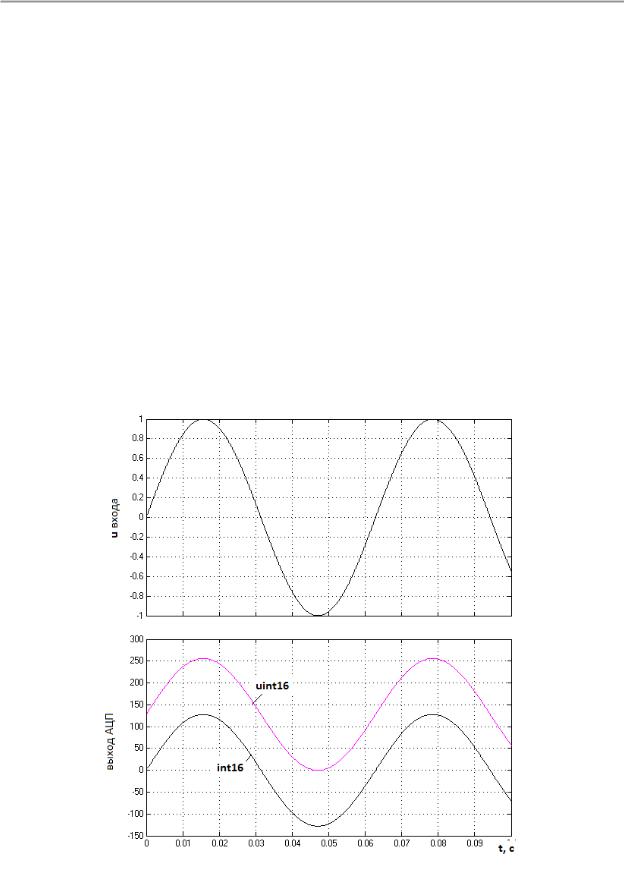
Output data type: (Тип выходных данных) – представление цифровых данных на выходе АЦП. Обычно это 8, 16 или 32 разрядные целые числа, в зависимости от типа АЦП. В данном случае входное напряжение измеряется как бы в битах и для дальнейшего использования нужен соответствующий пересчет.
Output neganive values (отрицательные выходные значения) – если отмечена эта опция, то будут использоваться отрицательные числа, при условии, что указан так же соответствующий тип выходных данных. Например, Output data type указан как int16. Если отмечено Output neganive values, то число шагов по напряжению составит 2n-1 при положительном напряжении и столько же при отрицательном. Если Output data type указан как uint16, то значения будут только положительные (даже при отрицательных напряжениях) и максимальное значение выходной величины будет 2n. На рисунке приведены графики на входе и выходе восьмиразрядного АЦП в зависимости от типа выходных данных:
62

ЛАБОРАТОРНАЯ РАБОТА №3
ДОПОЛНЕНИЕ 3
Пример программы для MATLAB Function
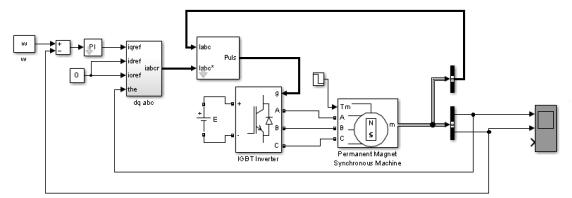
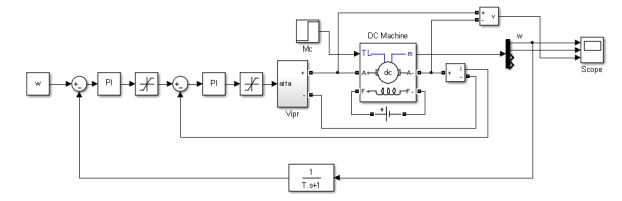
Двухконтурная система подчиненного регулирования двигателем постоянного тока с ПИ регуляторами. Схема построена из блоков
Simulink и SimPowerSystem.
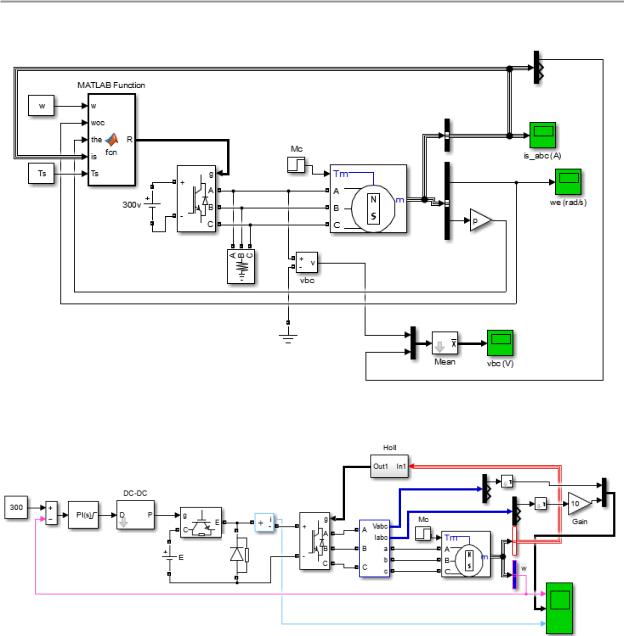
Та же схема с блоком MATLAB Function имитирующим микропроцессорное управление. Период дискретизации Ts.
Пример программы для MATLAB Function для двухконтурной системы подчиненного регулирования двигателем постоянного тока с ПИ регуляторами:
function z = regul(w,woc,i,Ts) |
- описание функции |
||
%#codegen |
- указание создать код Matlab с выявлением ошибок |
||
persistent v1 v2 |
- объявление устойчивых переменных |
||
Ki1=78.2847; Ki2=11.8764; |
- объявление констант |
||
Kp1=61.6200; Kp2=370.5724; |
|
|
|
if isempty(v1,v2) |
- инициализация устойчивых переменных |
||
v1=0; v2=0; |
|
|
|
end; |
|
|
|
dw=w-woc; |
- вычисление разности скоростей |
||
63
|
|
ЛАБОРАТОРНАЯ РАБОТА №3 |
x1=v1+dw*Ts; |
|
- интегрирование методом Эйлера |
v1=x1; |
|
- сохранение предыдущего значения |
io=Kp1*dw+Ki1*v1; |
- пи регулятор первый |
|
if io>=40 |
|
- ограничение тока |
io=40; |
|
|
end; |
|
|
if io<=0 |
|
|
io=0; |
|
|
end; |
|
|
di=io-i; |
|
- вычисление разности токов |
x2=v2+di*Ts; |
|
- интегрирование методом Эйлера |
v2=x2; |
|
- сохранение предыдущего значения |
uo=Kp2*di+Ki2*v2; |
- пи регулятор второй |
|
if uo<=0 |
|
- ограничение напряжения |
uo=0; |
|
|
end; |
|
|
if uo>=400 |
|
|
uo=400; |
|
|
end; |
|
|
z=uo; |
- значение напряжения |
|
end |
- конец функции |
|
64
ЛАБОРАТОРНАЯ РАБОТА № 4
СИСТЕМА АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ SIM-
ULINK CONTROL DESIGN.
ПРОЕКТИРОВАНИЕ ВЕКТОРНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ
Цифровое регулирование синхронными двигателями с постоянными магнитами во многих случаях приводит к повышенным требованиям к быстродействию микроконтроллера, что связано с высоким быстродействием самих двигателей. Например, коллекторный двигатель 4.5 кВт имеет момент инерции 0.23 кгм2, а примерно такой же СДПМ 4.2 кВт имеет момент инерции 0.0016 кгм2, т.е. в 143 меньше; на порядок отличается и индуктивность. В тех случаях, когда требования к точности системы регулирования не очень велики, используют даже не шим-инвертор, а обычный инвертор управляемый датчиками Холла с регулированием скорости по цепи питания постоянного тока шип-преобразователем.
1. Спроектировать систему векторного управления СДПМ, используя Simulink Control Design (см. приложение). Параметры электрических двигателей:
№ |
Pном, Вт |
n, об/мин |
U, B |
R, Ом |
Ld, мГн |
Lq, мГн |
, Вб |
J, кгм2 |
p |
|
|
|
|
|
|
|
|
|
|
1 |
250 |
3000 |
310 |
15.6 |
22 |
22 |
0.18 |
25.10-6 |
2 |
2 |
190 |
3800 |
310 |
4.8 |
15 |
15 |
0.185 |
11.10-5 |
2 |
|
|
|
|
|
|
|
|
|
|
3 |
700 |
4300 |
310 |
2 |
6 |
6 |
0.185 |
19.10-5 |
2 |
|
|
|
|
|
|
|
|
|
|
4 |
1400 |
4500 |
310 |
0.65 |
2 |
2 |
0.086 |
40.10-5 |
4 |
|
|
|
|
|
|
|
|
|
|
5 |
1000 |
2000 |
310 |
1 |
5.3 |
5.3 |
0.18 |
60.10-5 |
4 |
|
|
|
|
|
|
|
|
|
|
6 |
2200 |
5000 |
540 |
0.2 |
1 |
1 |
0.068 |
48.10-5 |
4 |
7 |
4200 |
3000 |
540 |
0.1 |
0.98 |
0.98 |
0.12 |
160.10-5 |
4 |
|
|
|
|
|
|
|
|
|
|
Требование к системе: отсутствие перерегулирования; точность не менее 2%; время переходного процесса не более 2 времен естественного переходного процесса двигателя. Определите путем моделирования допустимую частоту дискретизации. Начинать нужно с Ts = 1 мкс, т.к. это время дискретизации обычно удовлетворяет любому двигателю.
Система строится на идентичности модели СДПМ и ДПТ (см. дополнение 1). Промежу-
точная модель из блоков Simulink и SimPowerSystem.
65
ЛАБОРАТОРНАЯ РАБОТА №4
Окончательная модель должна иметь вид:
2. Сравните полученную схему с системой с датчиками Холла и шип-преобразователем.
ДОПОЛНЕНИЕ 1
Представление синхронного двигателя с постоянными магнитами (СДПМ) в виде двигателя постоянного тока (ДПТ)
Уравнения СДПМ в координатах dq с одинаковыми индуктивностями по осям d и q имеют вид:
ud |
R id |
L |
did |
p L iq |
|
||||
|
|
|
dt |
|
uq |
R iq |
L |
diq |
p Lid p m |
|
||||
|
|
|
dt |
|
(1)
66
|
|
ЛАБОРАТОРНАЯ РАБОТА №4 |
||||||
|
|
J |
d |
|
3 |
p m iq MH |
||
|
|
|
|
|
||||
|
|
|
|
dt 2 |
||||
|
|
|
d |
|
||||
|
|
|
|
|||||
|
|
|
dt |
|||||
где |
ud, uq - напряжения по осям dq; |
|||||||
id, iq |
- токи по осям dq; |
|||||||
L - индуктивность статора в координатах dq; |
||||||||
R |
- активное сопротивления статора; |
|||||||
Ψm |
- поток сцепления от постоянного магнита; |
|||||||
p |
|
- число пар полюсов двигателя; |
||||||
J - момент инерции двигателя и нагрузки; |
||||||||
Мн |
- момент нагрузки. |
|||||||
В системах векторного управления добиваются отсутствия тока id = 0 (поля статора и ротора расположены под 900 и момент в этом случае будет максимальным). Если это условие выполнено, то уравнения принимают вид:
di
L q R iq p m uq dt
Jd 3 p m iq MH dt 2
т.е. почти полностью совпадают с уравнениями ДПТ
L di Ri K u
dt
J d Ki Mн
dt
В двигателе постоянного тока коэффициент К один и тот же и для момента и для противоэдс. В данном случае они отличаются в 1.5 раза. Хотя уравнения СДПМ (1) нелинейные, но в системе векторного управления они становятся линейными, и проектировать такую систему (выбирать параметры регуляторов) можно так же, как и для двигателей постоянного тока, например, воспользоваться приложением Simulink Control Design.
Отметим, что при малой индуктивности взаимное влияние токов d и q каналов друг на друга не велико, а при ud = 0 практически совпадает с условием id = 0.
Таким образом, СДПМ подобен ДПТ при условии использования синусоидального токового шим-инвертора. Возможны два подхода: гистерезисный шим и система с обычным шим-инвертором напряжения с обратной связью по току и с большим коэффициентом усиления в контуре тока.
Примечание: Еще раз отметим, что эквивалентность модели с коллекторным двигателем постоянного тока модели синхронного двигателя с постоянными магнитами будет только в том случае, если в модели ДПТ введена обратная связь по току.
67

ЛАБОРАТОРНАЯ РАБОТА №4
ДОПОЛНЕНИЕ 2
Программирование MATLAB Function
Есть особенности программирования MATLAB Function, которые позволяют упростить записи и программу.
1.Если сигнал многомерный, например, трехмерный вектор, то компактную запись сигнала - как один, но векторный сигнал – можно получить, указав его вид:
x=[0, |
0, |
0] |
- запись в виде строки |
y=[0; |
0; |
0] |
- запись в виде столбца |
2. Обработку многомерного сигнала можно проводит в цикле, например:
for k=1:3 |
- цикл от 1 до 3 |
di(k)=iw(k)-is(k); - вычисление разности двух величин
end; |
- конец цикла |
Систему регулирования с гистерезисным шимом можно записать в виде программы. Частью этой программы, вложенной в программу управления, является подпрограмма вычисления гистерезиса, оформленной в виде подфункции.
Подпрограмма гистерезиса
function ztok = gisfcn(x) |
- описание вложенной функции |
|
persistent v a |
- объявление устойчивых переменных в теле подфункции |
|
G=0.02; |
- объявление констант – ширина гистерезиса |
|
if isempty(v,a) |
- инициализация устойчивых переменных в виде векторов с указанием |
|
v=[0,0,0]; a=[0,0,0]; |
|
их размера |
|
|
|
end; |
|
|
for k=1:3 |
- организация цикла от 1 до 3 |
|
v(k)=x(k)-v(k); |
- приращение входной переменной |
|
if (v(k)>0)&&(x(k)>0)&&(x(k)>=G) |
- условие срабатывания реле при возрастании х |
|
a(k)=1; |
|
- промежуточное значение на выходе реле |
end; |
|
|
if (v(k)<0)&&(x(k)<0)&&(x(k)<-G) |
- условие срабатывания реле при убывании х |
|
a(k)=-1; |
|
- промежуточное значение на выходе реле |
end; |
|
- конец цикла |
v(k)=x(k); |
|
- сохранение предыдущего значения |
end; |
|
|
ztok=a; |
|
- окончательное значение на выходе реле |
end |
|
- конец функции |
|
|
68 |
ЛАБОРАТОРНАЯ РАБОТА № 5
СИСТЕМА АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
SIMULINK DESIGN OPTIMIZATION.
ПРОЕКТИРОВАНИЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ. ОПТИМИЗАЦИЯ ПО ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКЕ
Спроектировать систему подчиненного регулирования ДПТ, используя Simulink Design Optimization (см. приложение). Параметры электрических двигателей:
|
|
|
|
Двигатель |
|
|
||
|
|
|
|
|
|
|
|
|
N |
Pном |
Uном |
nном |
|
Iном |
Rя, |
Lя |
J |
|
|
|
|
|
|
|
|
|
кВт |
В |
об/мин |
|
A |
Ом |
Гн |
кгм2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
1 |
0.7 |
220 |
1500 |
|
4.3 |
5.33 |
0.12 |
0.012 |
|
|
|
|
|
|
|
|
|
2 |
4 |
220 |
1500 |
|
20. |
0.65 |
0.008 |
0.33 |
|
|
|
|
|
|
|
|
|
3 |
3.7 |
110 |
1000 |
|
41 |
0.219 |
0.009 |
0.5 |
|
|
|
|
|
|
|
|
|
4 |
13.5 |
110 |
1050 |
|
145 |
0.22 |
0.006 |
1.5 |
|
|
|
|
|
|
|
|
|
5 |
4.5 |
220 |
1500 |
|
24.5 |
0.6 |
0.0078 |
0.23 |
|
|
|
|
|
|
|
|
|
6 |
14 |
220 |
750 |
|
79 |
0.267 |
0.006 |
1.6 |
|
|
|
|
|
|
|
|
|
7 |
0.004 |
27 |
3000 |
|
0.37 |
18.5 |
0.01 |
4.5 10-7 |
|
|
|
|
|
|
|
|
|
8 |
0.450 |
20 |
1500 |
|
25.4 |
0.62 |
0.06 |
1.2 10-4 |
|
|
|
|
|
|
|
|
|
Система подчиненного регулирования
имеет нелинейности типа насыщение для ограничения, например, тока двигателя (не более трехкратного номинального). Датчик скорости имеет задержку по времени, в данном
69