

Учебное пособие 2025
.pdfЛАБОРАТОРНАЯ РАБОТА №1
В меню LTI Viewer щелкните правой кнопкой мыши, выберите Characteristics > Peak Response и Characteristics > Rise Time, чтобы показать максимальную реакцию и время нарастания соответственно. Наведите курсор на синие точки, чтобы показать значения маркеров. Переходная характеристика показывает, что время нарастания составляет 0.45 секунды и максимальная амплитуда 1.03 рад/с, или превышение 3%. Эти результаты соответствуют требованиям к конструкции.
Добавление фильтра
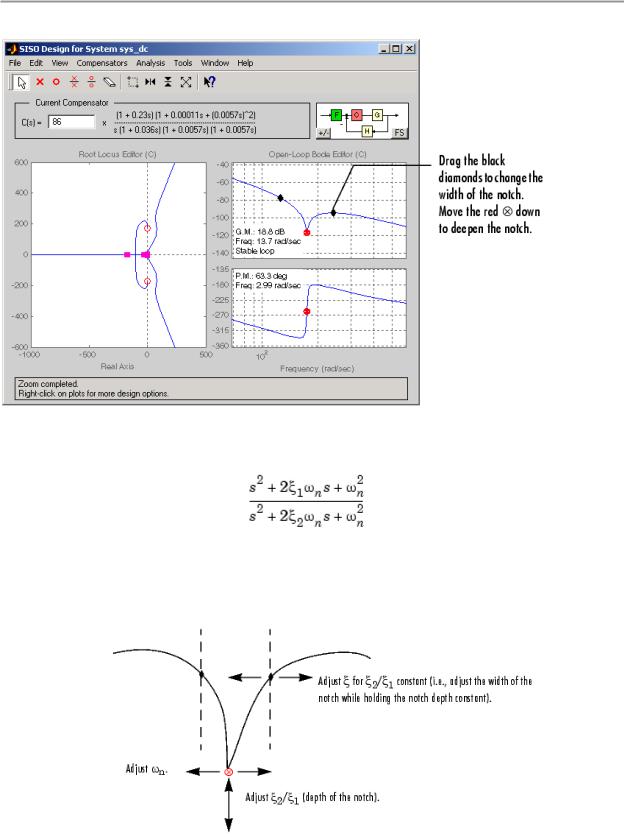
Если известно, что есть колебания в системе регулирования на какой-то частоте, то можно использовать заграждающий фильтр, чтобы уменьшить коэффициент усиления устройства на этой частоте. Чтобы добавлять заграждающий фильтр, в меню после правого щелчка выбирают Add Notch и размещают фильтр на частоту, которую Вы хотите уменьшить. Черный 'x' появится рядом со стрелкой мыши; разместите его на частоту, которую Вы хотите уменьшить.
Этот рисунок показывает результат.
Обратите внимание, что для добавления фильтра необходимо изменить масштаб изображения, так как метка должна быть в области более высокой частоты, чем показано на рисунке.
Чтобы видеть параметры фильтра метки более подробно, выберите Zoom X-Y (изменить масштаб изображения) в меню правым щелчком для Боде графика. Левый щелчок и тяните мышь, чтобы изменит масштаб изображения в выбранной области.
20
ЛАБОРАТОРНАЯ РАБОТА №1
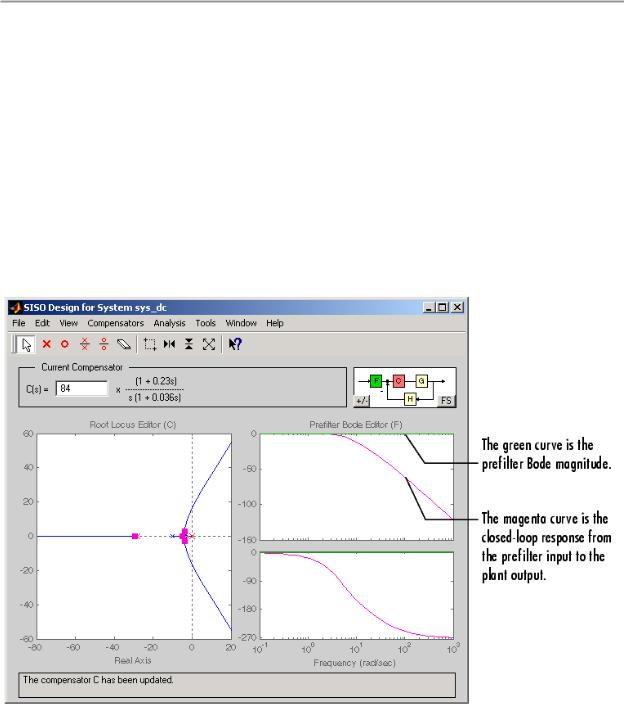
Чтобы понять, как производится наладка параметров фильтра метки, положим, что передаточная функция фильтра.
Три регулируемых параметра ξ1, ξ2 и ωn. Отношение ξ2/ ξ1 устанавливает глубину метки, и ωn является собственной частотой метки. Эти диаграммы, как перемещение красных 


точек даточную ю
Близкий взгляд на параметры фильтра метки
21
ЛАБОРАТОРНАЯ РАБОТА №1
Добавление предварительного фильтра
Вы можете использовать SISO Design Tool, чтобы добавить и изменить предварительный фильтр (предфильтр) в вашем проекте. Типичные применения предфильтра включают:
Достижение упреждения отслеживания, чтобы уменьшить нагрузку в контур об ратной связи (когда запасы устойчивости невелики)
Отфильтровывание высокочастотной составляющей в сигнале, чтобы ограничить перерегулирование или избежать возбуждения резонанса.
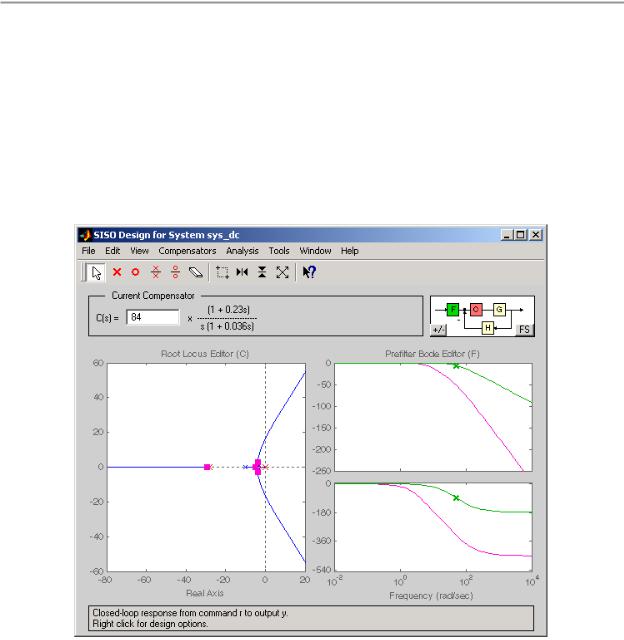
Общий предфильтр - простой НЧ фильтр, который уменьшает помехи на входе. Чтобы сделать это, сначала откройте Боде диаграмму для предфильтра, выбирая Prefilter Bode в меню View.
Для ясности, вышеупомянутый рисунок не показывает разомкнутую Боде диаграмму для компенсатора (C). Чтобы удалить Боде диаграмму, отключите Open-loop Bode в меню
View.
Если Вы не импортировали предфильтр, по умолчанию - коэффициент усиления единица. Вы можете добавить полюсы и нули и установить коэффициент усиления, используя те же самые методы, что Вы сделали при проектировании компенсатора (C), включая следующее:
Меню правого щелчка
22
ЛАБОРАТОРНАЯ РАБОТА №1
Окно Edit Compensator F
Prefilter Bode меню Edit
Инструментальная панель
Быстрый способ создавать НЧ фильтр состоит в том, чтобы добавить пару сложных полюсов. Чтобы сделать это, сначала поставьте под напряжение энергосистему для предфильтра Боде, затем выберете Add Pole/Zero и Complex Pole от предфильтра Боде меню правого щелчка. Для этого примера, пробуйте разместить полюсы приблизительно в 50 рад/с. Этот рисунок показывает полюсы, которые добавляют к предфильтру в диаграмму Боде.
По умолчанию, коэффициент затухания сложной пары - 1.0, что означает, что есть два действительных полюса приблизительно в 50 рад/с. Зеленая кривая, которая представляет предфильтр Боде, показывает, что точка на -3 дБ для спада - приблизительно в 50 рад/с. Сиреневая кривая, которая представляет замкнутый контур предфильтра установки, показывает, что после точки -3 дБ, коэффициент усиления замкнутого контура уходит за -40 дБ/декаду, чтобы обеспечить некоторое подавление помехи.
ДОПОЛНЕНИЕ 2
АНАЛОГОВЫЕ СИСТЕМЫ РЕГУЛЯТОРОВ
Из книги “Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами. / под ред. В.И. Круповича, Ю.Г. Барыкина, М.Л. Самовера. - Энергоиздат, 1982.”
23
ЛАБОРАТОРНАЯ РАБОТА №1
Развитие теории и практики систем регулирования электропривода, а также электроники привели к созданию аналоговых систем регуляторов, обеспечивающих высокое быстродействие и точность работы электроприводов. В основе аналоговой системы регуляторов находится операционный усилитель. Операционный усилитель — это усилитель постоянного тока с очень большим коэффициентом усиления по напряжению и очень большим входным сопротивлением и малым выходным сопротивлением. Применение операционного усилителя в качестве регулятора определяется возможностью реализации с высокой точностью желаемых передаточных функций и арифметических действий с входными сигналами, а именно: суммирования, умножения и деления сигналов, а также возможностью выполнения различных функциональных устройств. При использовании операционного усилителя в качестве регулятора на его входе происходит сравнение сигналов задания и фактического значения регулируемой величины в виде сигналов тока, пропорциональных входным напряжениям регулятора U1, U2, …, Un.
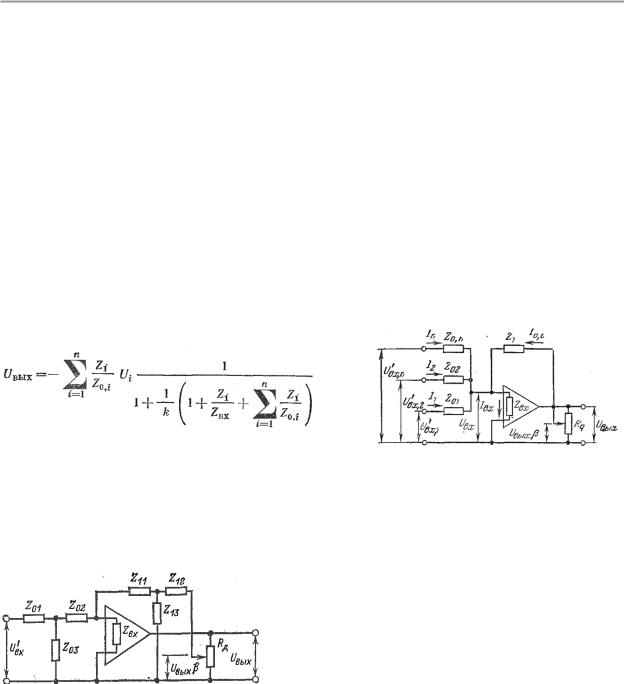
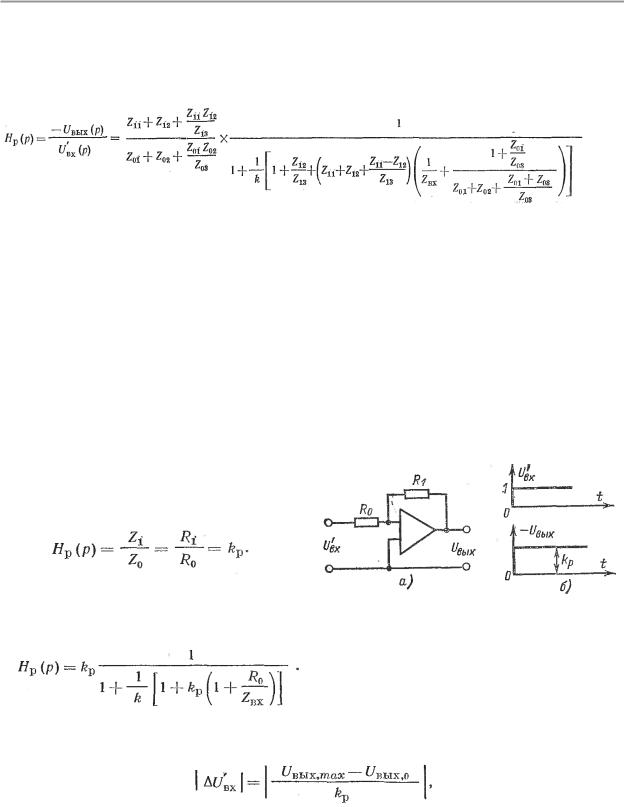
Зависимость между входным и выходным напряжениями для структурной схемы аналогового регулятора на рис. 1 имеет вид:
где n - количество входов регулятора; Ui - напряжение на i-м входе регулятора; Zвх - комплексное входное сопротивление операционного усилителя;
k - комплексный коэффициент усиления операционного усилителя; Z1 - комплексное сопротивление в цепи обратной связи операционного усилителя; Z0,i - комплексное сопротивление на i-м входе регулятора.
Рис. 2. Регулятор с Т-образными звеньями на входе и в цепи обратной связи.
Влиянием выходного сопротивления операционного усилителя можно пренебречь.
В практических расчетах часто полагают, что k ≈ ∞ тогда формула для выходного напряжения существенно упрощается
n |
Z |
|
|
Uвых |
i |
Ui |
(*) |
|
|||
i 1 |
Z0,i |
|
|
В зависимости от характера сопротивлений Z0,I и Z1 с помощью операционного усилителя могут быть реализованы различные регуляторы.
24
ЛАБОРАТОРНАЯ РАБОТА №1
Нередко входные цепи и цепь обратной связи содержат Т-образные звенья, и структурная схема регулятора может быть представлена в более общем виде, как на рис. 2. Передаточная функция такого регулятора
(**)
Для плавного изменения коэффициента пропорционального усиления и постоянных времени регулятора применяется включение цепи обратной связи через делитель (рис. 2). Ток отрицательной обратной связи уменьшается, вследствие чего ослабевает действие, уменьшающее коэффициент усиления. При питании цепи обратной связи частью β выходного напряжения (0.1 < β < 1) передаточная функция соответствующего регулятора умножается на множитель 1/β. Все формулы выведены в предположении, что β = 1. Полное сопротивление делителя должно быть много меньше активного сопротивления в цепи обратной связи.
Рассмотрим основные схемы регуляторов.
Пропорциональный регулятор (П-регулятор)
Реализуется в случае, когда Z0 и Z1 являются омическими сопротивлениями. Передаточная функция такого регулятора имеет вид:
С учетом корректирующего множителя, |
|
полученного из (*), передаточная функция |
|
имеет вид: |
Рис. 3. П-регулятор |
|
Во избежание насыщения регулятора допустимое изменение входного напряжения должно удовлетворять условию:
где Uвых,о - выходное напряжение до изменения входного напряжения; Uвых,mах - максимально возможное выходное напряжение усилителя.
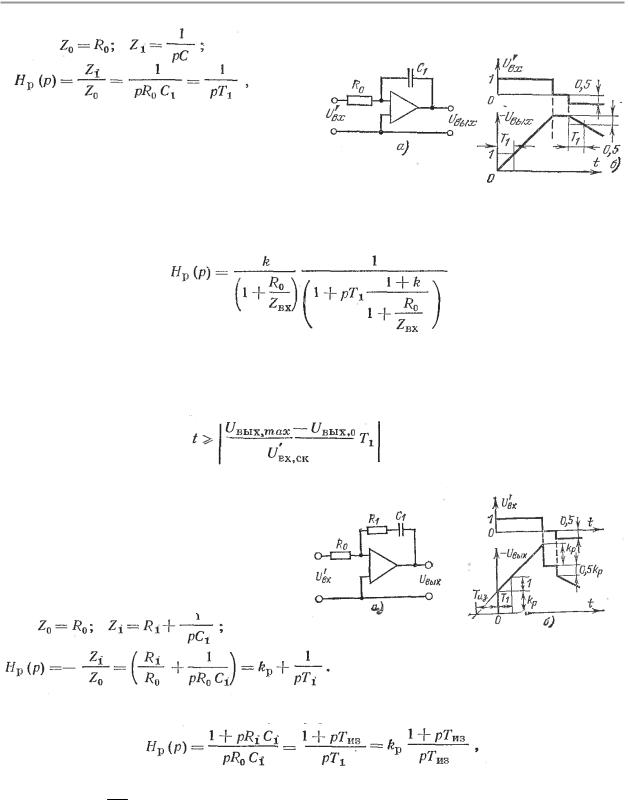
Интегральный регулятор (И-регулятор) (рис. 4). Заменив в цепи обратной связи резистор R1 конденсатором С1 получим интегральный регулятор
25
ЛАБОРАТОРНАЯ РАБОТА №1
где Т1 — постоянная интегрирования.
Рис. 4. И-регулятор.
При уточнении передаточной функции по (*) получим:
Эта функция соответствует инерционному звену первого порядка с большим коэффициентом пропорционального усиления. В управляемой области регулятор является интегральным. Если скачкообразный входной сигнал поддерживается длительно, то через регулятор дойдет до насыщения и станет неуправляемым.
Пропорционально-интегральный регулятор (ПИ-регулятор) (рис. 5). Если в це-
пи обратной связи оставить и резистор R1 и конденсатор С1 то переходная характеристика схемы должна быть суммарной из двух вышеописанных характеристик
Рис. 5. ПИ-регулятор
Передаточную функцию регулятора можно записать и в другой форме
где Tиз kрT1 R1 R0C1 R1C1 - постоянная времени изодрома. R0
Из рассмотрения передаточных функций регулятора можно сделать вывод, что при скачке входного сигнала выходной сигнал также скачком возрастает до величины, в kр раз большей, а затем линейно изменяется, интегрируя во времени входной сигнал. Если перед скачком на выходе имелось некоторое напряжение и Uвых,0, то на входе допустим скачок Uвх,ск, определяемый (1-193). Насыщение регулятора наступает при
26
ЛАБОРАТОРНАЯ РАБОТА №1
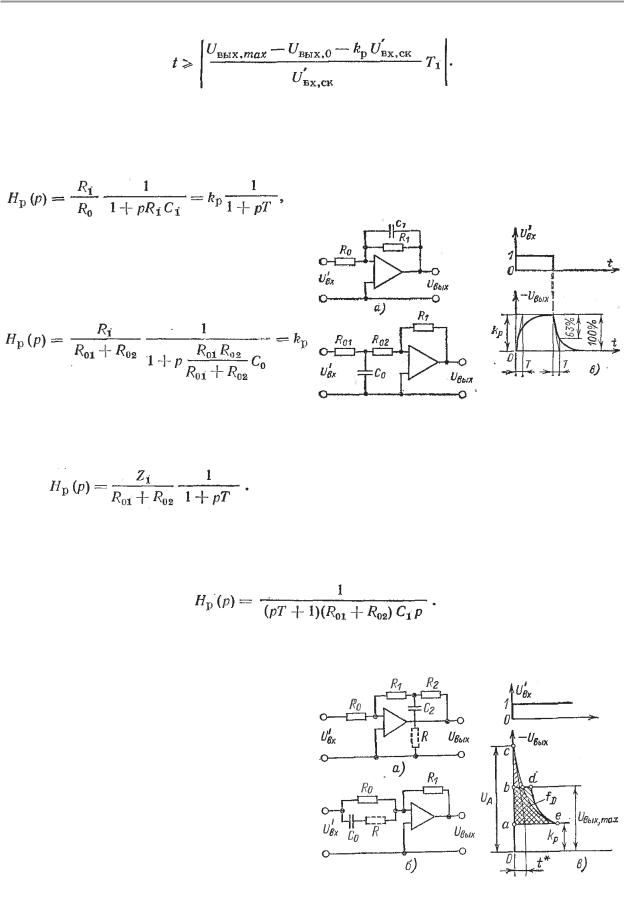
Апериодическое звено первого порядка (рис. 6). Если параллельно конденсатору И-
регулятора включить активное сопротивление, то реализуется апериодическое звено первого порядка с пропорциональным коэффициентом kp
где T - постоянная времени апериодического звена первого порядка. При |U’вх| kp >
> |Uвых,max - Uвых,0|.
Аналогичную передаточную функцию можно получить по схеме рис.6
Когда в цепи обратной связи усилителя включено комплексное сопротивление Z1, передаточная функция регулятора будет иметь вид:
Рис. 6. Апериодическое звено первого порядка.
Например, если в цепи обратной связи будет включен конденсатор Z1 |
1 |
, переда- |
|
||
|
C1p |
|
точная функция регулятора будет |
|
|
Измерения входного и выходного напряжения показано на рис. 6, в.
Пропорционально - дифференциальный регулятор ( ПД-регулятор ) (рис. 7) объ-
единяет в себе свойства пропорционального и дифференциального регуляторов; в стационарном режиме работает как пропорциональный усилитель входного сигнала, но при изменении напряжения на входе регулятора к его выходному напряжению добавляется еще напряжение, соответствующее скорости изменения входного сигнала (чем больше изменение, тем больше выходное напряжение). Передаточная функция
регулятора рассчитывается по (**) при |
Рис. 7. ПД-регулятор |
| k | >> 1 |
27 |
|
ЛАБОРАТОРНАЯ РАБОТА №1
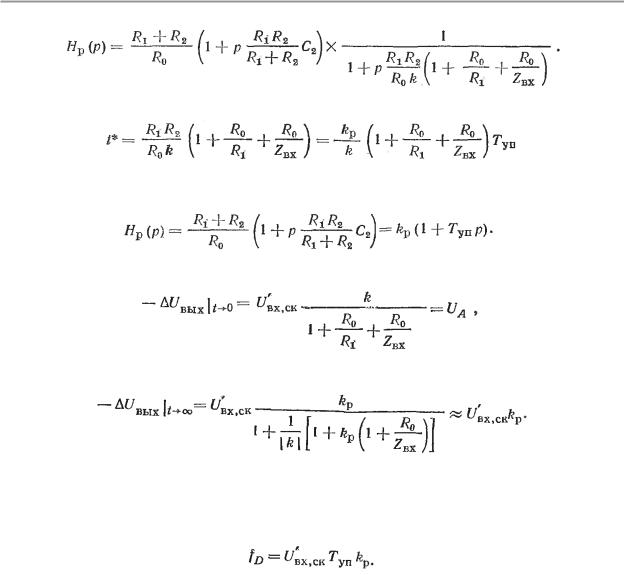
Поскольку сомножитель
является паразитной постоянной времени, передаточная функция ПД-регулятора примет вид:
Из формулы ПД регулятора можно заключить, что в момент скачка входного сигнала U’вх,ск выходное напряжение изменяется на
а в установившемся режиме, т. е. по истечении длительного времени после изменения входного сигнала, выходное напряжение достигнет величины
В промежуточные моменты времени, т. е. между состояниями при t → 0 и t → ∞, схема ведет себя как инерционное звено первого порядка с постоянной времени t*. При скачкообразном изменении входного сигнала площадь графика переходного процесса выходного напряжения (площадь упреждения) определяется формулой
Если не учитывать факт ограничения выходного напряжения операционного усилителя, что справедливо при самых малых изменениях входного напряжения, то площадь fD ограничена линией асе (рис. 7, в). Однако из рассмотрения формулы для UA можно заключить, что даже малые значения Uвх,ск приводят к насыщению регулятора. В этом случае емкость С2 в поперечной ветви цепи обратной связи заряжается не от пикового значения UA, а от меньшего напряжения Uвых,max. Следовательно, зарядка этой емкости из-за пониженного напряжения происходит медленнее, ток обратной связи Iо,с на входе усилителя будет меньшим и усилитель будет находиться в насыщенном состоянии более длительное время. В результате этого площадь упреждения fD (она будет ограничена линией аbdе) и в этом случае останется неизменной, следовательно, и в этом случае регулирующее воздействие не будет искажено вследствие насыщения регулятора. В этом преимущество данной схемы ПД-регулятора перед схемой с конденсатором во входной цепи (рис. 7,б).
Площадь упреждения начнет уменьшаться лишь тогда, когда разница между Uвых,max и Uвх,ск kp становится малой.
В ПД-регуляторе в целях демпфирования собственных колебаний усилителя возможно включение в поперечную ветвь (рис. 7, а) или во входную цепь (рис. 7, б) резистора R.
28
ЛАБОРАТОРНАЯ РАБОТА №1
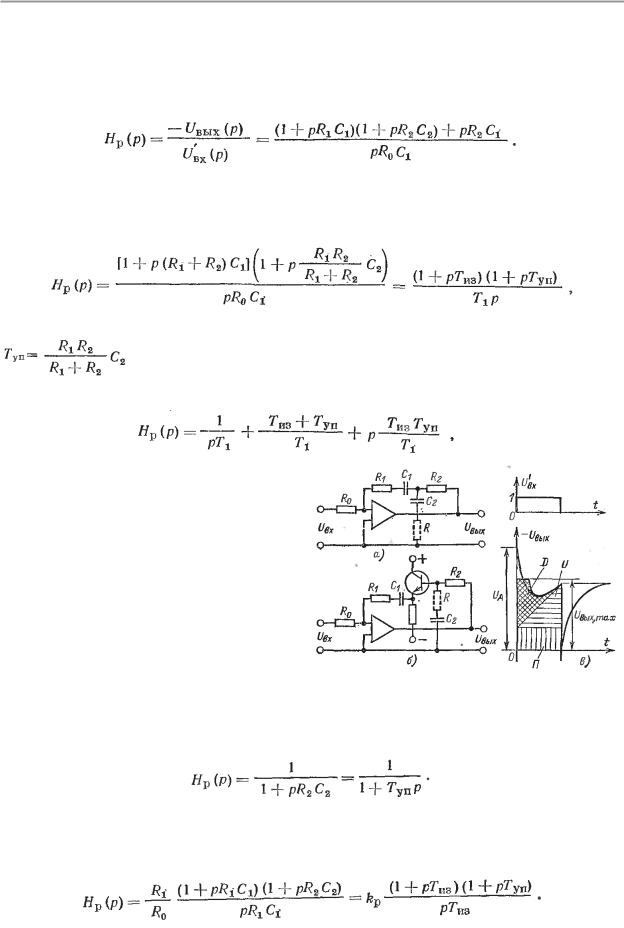
Пропорционально - интегрально - дифференциальный регулятор (ПИД-регулятор):
(рис. 8). Изложенные выше, сведения о ПИ и ПД-регуляторах позволяют сконструировать цепь обратной связи так, чтобы получить регулирование по ПИД-закону. Передаточная функция ПИД-регулятора имеет вид:
Произведение R2C1 вносит искажение в закон регулирования. Для улучшения свойств ПИД-регулятора это произведение надо сделать по возможности меньшим, т. е. необходимо, чтобы R1С1 + R2С2 R2С1, при условииR1 R2. Можно вывести окончательный вариант передаточной функции
где T1 = R0C1 – постоянная интегрирования; Tиз = (R1 + R2)C1 – время изодрома;
- время упреждения (постоянная дифференцирования).
Откуда следует, что
т. е. в передаточную функцию регулятора |
|
|
входят И, П и Д-составляющие. Так как эти |
|
|
составляющие суммируются, то можно |
|
|
складывать и соответствующие составляю- |
|
|
щие для переходной функции. В отноше- |
|
|
нии Д-составляющей здесь справедливы |
|
|
соображения, которые были изложены при |
|
|
рассмотрении ПД-регулятора. |
|
|
Возможен вариант ПИД-регулятор а с |
|
|
разделительным усилителем в цепи обрат- |
|
|
ной связи регулятора (рис. 8, б). Такое |
|
|
включение применяется, когда невозможно |
|
|
удовлетворить неравенство R1 |
R2. Вы- |
Рис. 8 ПИД-регулятор |
ходное напряжение регулятора |
поступает |
|
на эмиттер транзистора и далее в цепь обратной связи с запаздыванием согласно передаточной функции
Здесь это напряжение дифференцируется на емкости С1 и образует ток обратной связи, протекающий по резистору R1. Вследствие преобразования сопротивлений время изодрома Tиз ≈ R1C1, а коэффициент пропорционального усиления kр ≈ R1/R0. Передаточная функция такого ПИД-регулятор а с «активной обратной связью» имеет вид:
29