

Учебное пособие 1690
.pdfРис.14 Структурные схемы двухканальных фильтров
Схемы I и III НДФ обладают свойствами псевдолинейных фильтров, т. е. при гармоническом входном сигнале их эквивалентные ЛЧХ зависят только от частоты входного сигнала и не зависят от его амплитуды. Свойства схемы II находят адекватное отображение в виде последовательного соединения идеального реле и НДФ со свойствами схемы III. Отличия характеристик разных схем НДФ определяет способ их применения для построения высококачественных систем автоматического регулирования.
Переходные процессы в замкнутых контурах управления, включающих схемы I или III НДФ, протекают следующим образом. В состоянии покоя, а также при достаточно малых отклонениях от него, характеристики фильтров схем I и III зависят только от частоты, что сообщает замкнутой системе управления линейные свойства (пропорциональность между входом и выходом). При больших отклонениях от состояния покоя коэффициент усиления замкнутой системы возрастает за счет подъема амплитудной характеристики НДФ при неизменной фазовой характеристике системы. Это приводит к возникновению колебаний выходной координаты в переходном
21
режиме. По мере уменьшения рассогласования происходит параметрическая перестройка коэффициента усиления на частоте колебаний, что приводит к увеличению запаса устойчивости системы и, следовательно, уменьшению колебаний выходной координаты.
Из этого следует, что вблизи положения равновесия расчет замкнутой системы автоматического управления проводится методами теории линейных систем. Параметры линейных фильтров схем I и III выбираются таким образом, чтобы обеспечить необходимые запасы устойчивости. При больших рассогласованиях можно оценить наибольшие амплитуды колебаний координат системы. Частота колебаний ω0 определяется точкой пересечения фазовой характеристики приведенной линейной части системы с осью —π.
Для схемы III амплитуда колебаний может быть определена таким способом: зная ω0 и уровень ограничения усилителя F2, находим значение координаты х3 на этой частоте:
После этого |
≈ |
4 |
| |
( )|| |
( )| |
(42) |
|
|
|||||
|
определяем |
амплитуду |
колебаний выходной координаты |
|||
системы по формуле
| э( )| = (43)
где xmi — амплитуда колебаний i-й координаты системы. Система вблизи положения равновесия оказывается линейной, а вне некоторой области начала координат — релейной. Представление характеристик схемы II определяет подход к построению систем аналогичный известному методу синтеза релейных автоколебательных систем.
Если в замкнутой системе включен НДФ по схеме II, то в ней наблюдается устойчивый автоколебательный режим. Его параметры могут быть определены из уравнения гармонического баланса любым из известных
методов: |
( ) ( |
) = −1 |
(44) |
где |
|||
ω0 — частота( ) = л ( ) лНДФ( |
); |
|
|
|
автоколебаний; |
|
|
— передаточная функция приведенной линейной части системы |
|||
автоматическогол |
управления; |
|
|
лНДФ—псевдолинейная передаточная функция схемы II НДФ. Применение такой схемы НДФ для построения систем управления дает
определенные преимущества по сравнению с чисто релейной схемой: при одинаковых параметрах запаздывающего звена в схеме II
( ) = 1] |
фазовые |
|
получим примерно одинаковые амплитудные[ ( )и= ( ) = |
характеристики, но в схеме II не требуется ставить опережающего звено. Это |
|
дает большие преимущества при конструировании реальных САУ, так как включение опережающих звеньев всегда нежелательно ввиду трудности борьбы с помехами.
22
4. ПРИМЕРЫ ПОСТРОЕНИЯ СИСТЕМ УПРАВЛЕНИЯ НАМОТОЧНЫМ СТАНКОМ
Рассмотрим схемы построения намоточных станков.
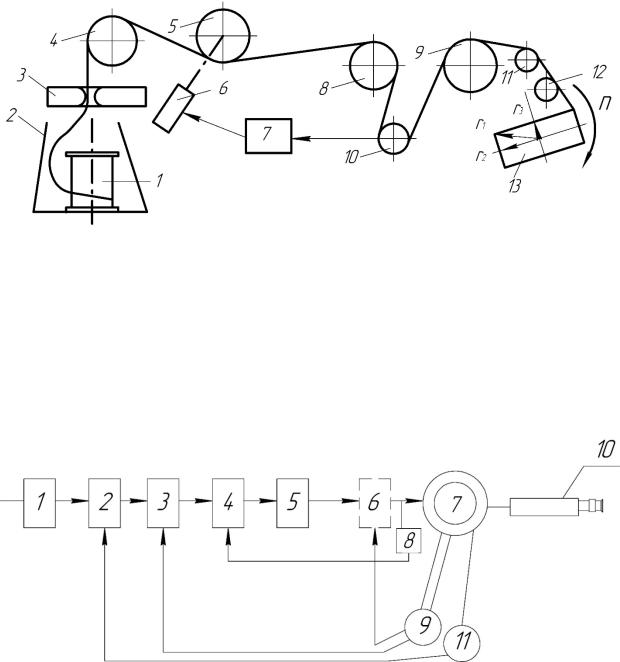
Рис. 15. Кинематическая схема намоточного станка
Кинематическая схема намоточного станка состоит из: 1 – смоточной катушки; 2 – баллоноограничитель; 3 – направляющий глазок; 4, 8, 9 – направляющие ролики; 5 – натяжной ролик; 6 – асинхронный двигатель; 7 – преобразователь частоты; 10 – датчик натяжения провода; 11 – устройство укладки; 12 – блок учета растяжения; 13 – намоточный шаблон. Форма шаблона прямоугольная. Буквами r1, r2 и r3,показаны расстояния ребра и граней шаблона от оси вращения.
Рис. 16. Функциональная схема электропривода намоточного станка
1 – устройство с числовым программным управлением; 2 – регулятор положения; 3 –регулятор скорости; 4 – регулятор тока; 5 – преобразователь частоты; 6 – регулятор растяжения провода; 7 – асинхронный двигатель; 8 – датчик тока; 9 – датчик скорости; 10 – исполнительный механизм (укладчик); 11 – датчик положения
23
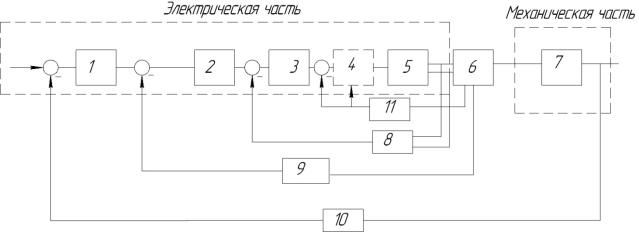
На основе функциональной схемы 16 была построена структурная схема, изображенная на рисунке 17.
Рис. 17. Структурная схема системы управления электропривода намоточного станка
Адаптивная система управления намоточным станком состоит из электрической и механической части. Электрическая часть состоит из преобразователя частоты – 5, системы управления электропривода (регулятора тока – 3, регулятора положения – 1 и регулятора скорости – 2, регулятор растяжения провода – 4). В механическую часть входит исполнительный механизм (укладчик) – 7, который выполняет основную роль. Асинхронный двигатель – 6 представляет собой электромеханическую часть систему управления электропривода, который преобразуют электрическую энергию в механическую. Структурная схема устройства для управления намоточным станком состоит из четырех контуров с внутренним контуром момента (тока) – 8 и внешними: контуром оборотов – 9, контуром тока – 10, контуром растяжения – 11 . Система имеет регулятор момента, скорости, растяжения положения: датчики момента, скорости, положения, растяжения.
5. ЗАДАНИЕ
Используя материалы примера построить адаптивные нелинейные системы управления намоточным станком. Сделать выводы по полученным системам управления намоточным станком.
6.СОДЕРЖАНИЕ ОТЧЕТА
1.Кинематическая, функциональная и структурная схема намоточного
станка.
2.Описание объекта (система дифференциальных уравнений).
3.Синтез нелинейной системы.
4.Привести схемы управления намоточным станком.
24
7.КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Типы корректирующих устройств и методы оценки качества управления.
2.Понятие о нелинейных двухканальных фильтрах.
3.Системы с переменным демпфированием в цепи обратной связи.
4.Коррекция динамических параметров апериодических звеньев.
5.Какие схемы построения намоточных станков существуют.
6.Классификация нелинейных корректирующих систем.
25
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Топчеев Ю.И. (ред.) Нелинейные корректирующие устройства в системах автоматического управления / М.: Машиностроение, 1971. — 468 с.
2.Бесекерский В. А. и Попов Е. П. Теория систем автоматического регулирования. Изд. 3-е, испр. - М.: Наука, 1975 –– 768 с.
3.Емельянов С. В. Системы автоматического управления с переменной структурой. М., изд-во «Наука», 1967 –– 336 с.
4.Айзерман М. А. Лекции по теории автоматического регулирования. М., Гостехиздат, 1956 –– 429 с
26
НЕЛИНЕЙНОЕ УПРАВЛЕНИЕ ДИНАМИЧЕСКИМИ СИСТЕМАМИ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторной работы № 1 «Исследование нелинейной адаптивной системы»
для студентов направления 27.04.04 «Управление в технических системах» (магистерская программа подготовки «Теория систем управления»)
очной формы обучения
Составители:
Литвиненко Александр Михайлович Баранов Денис Сергеевич
В авторской редакции
Компьютерный набор Д. С. Баранова
Подписано к изданию 24.12.2021. Уч.-изд. л. 1.7.
ФГБОУ BО «Воронежский государственный технический университет»
394006 Воронеж, ул. 20-летия Октября, 84
27