

Нелинейное управление динамическими системами. методические указания к выполнению лабораторной работы № 1 «Исследование нелинейной адаптивной системы». Литвиненко А.М., Баранов Д.С
.pdfМИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный технический университет»
Кафедра электропривода, автоматики и управления в технических системах
861-2021
НЕЛИНЕЙНОЕ УПРАВЛЕНИЕ ДИНАМИЧЕСКИМИ СИСТЕМАМИ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторной работы № 1 «Исследование нелинейной адаптивной системы»
для студентов направления 27.04.04 «Управление в технических системах» (магистерская программа подготовки «Теория систем управления»)
очной формы обучения
Воронеж 2021
УДК 681.511.4 (07) ББК 32.965.5я7
Составители:
д-р техн. наук А. М. Литвиненко, аспирант Д. С. Баранов
Нелинейное управление динамическими системами: методические указания к выполнению лабораторной работы № 1 «Исследование нелинейной адаптивной системы» для студентов направления 27.04.04 «Управление в технических системах» (магистерская программа подготовки «Теория систем управления») очной формы обучения / ФГБОУ ВО «Воронежский государственный технический университет»; сост. А. М. Литвиненко, Д. С. Баранов. Воронеж: Изд-во ВГТУ, 2021. 26 с.
В методических указаниях изложены требования и общие вопросы для выполнения лабораторной работы по дисциплине «Нелинейное управление динамическими системами».
Предназначены для студентов 3 курса.
Методические указания подготовлены в электронном виде и содержатся в файле МУ_НУДС_ЛР_ИНАС.pdf.
Ил. 17. Библиогр.: 4 назв.
УДК 681.511.4 (07) ББК 32.965.5я7
Рецензент - В. М. Питолин, д-р техн. наук, профессор кафедры электропривода, автоматики и управления в технических системах ВГТУ
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
2

ЛАБОРАТОРНАЯ РАБОТА № 1
1. ЦЕЛЬ РАБОТЫ
Целью работы является приобретение практических навыков исследования нелинейных систем управления.
В качестве объекта регулирования используется модель системы управления намоточным станком.
2.ОПИСАНИЕ ОБЪЕКТА
2.1.Типы корректирующих устройств и методы оценки качества
управления
Нелинейные динамические корректирующие устройства изменяют параметры самих звеньев автоматической системы причем изменяются только динамические параметры звеньев, а их статические характеристики остаются неизменными. При этом автоматическая система становится нелинейной во время переходного процесса и линейной в статике. Изменение динамических параметров производится путем коррекции во время переходного процесса сигналов на выходе линейного или нелинейного звена. Коррекция
производится |
путем |
умножения |
специально |
сформированного |
||
корректирующего сигнала |
а выходной сигнал звена. В результате при |
|||||
гармоническом возмущении на входе звена |
= sin |
сигнал на выходе |
||||
линейного звена принимает вид |
( |
) |
|
|||
|
, умножением= |
|
(1) |
|||
Функция |
sinкоторой− |
производится коррекция параметров |
||||
звена, и является «нелинейным динамическим корректирующим сигналом». Символ обозначает, что корректирующий сигнал с амплитудой F во время переходного процесса умножается на выходную величину на интервале
времени |
от до |
(или при изменении фазы выходного сигнала от |
до |
). |
|
|
|
Корректирующий сигнал формируется периодически, но дискретно. В течение времени − ; соответствующего большей части периода колебаний, корректирующий сигнал отсутствует.
При анализе систем с нелинейными динамическими корректирующими сигналами методом гармонической линеаризации при расчетах нелинейная характеристика заменяется выражением
3

= ( , ) + |
( , ) |
(2) |
|
Коэффициенты гармонической линеаризации имеют вид
( |
, |
) = |
|
|
sin( |
− |
)sin |
( |
) |
(3) |
|
||||||||||
( |
, |
) = |
|
|
sin( |
− |
)cos |
( |
) |
(4) |
|
|
Из полученных выражений видно, что нелинейный динамический корректирующий сигнал [ ] изменяет коэффициенты гармонической линеаризации.
Амплитуда корректирующего сигнала может быть любой сложной функцией времени. Однако технически наиболее целесообразно использовать два конкретных значения амплитуды динамического корректирующего сигнала F: «нуль» и «минус-единицу». При этом, в частности, выражение «корректирующий сигнал, равный нулю» обозначает то, что на определенном интервале времени при введении корректирующего сигнала «основной» сигнал исключается.
Таким образом, выражение «корректирующий сигнал, равный минус единице» обозначает, что на определенном интервале времени основной управляющий сигнал при введении корректирующего сигнала изменяет знак.
С достаточной для практики точностью симметричный колебательный переходный процесс в нелинейных автоматических системах может быть описан выражением
= ( )sin ( ) |
(5) |
В отличие от линейных систем коэффициент затухания колебаний ξ и частота колебаний ω системы во время переходного процесса не являются постоянными величинами. Поэтому выражение для амплитуды колебаний системы имеет вид
= ∫ |
или |
|
= |
(6) |
|
|
где А0 — значение амплитуды колебаний, определяемое начальными условиями.
Таким образом, для нелинейных систем текущее значение частоты колебаний ω имеет вид
4
= |
|
или |
= |
+ |
(7) |
|
|||||
Для линейных систем |
= |
и = |
+ |
|
|
Для симметричного переходного процесса в нелинейных автоматических системах имеем
|
|
|
|
(8) |
= sinψ; |
= ; = |
|
||
|
|
|||
При исследовании переходных процессов искомыми неизвестными являются коэффициент затухания ξ и частота колебаний ω.
Показатель затухания ξ может характеризовать не только затухающие, но и расходящиеся переходные процессы. При ξ < (0) переходный процесс
затухает |
|
< 0 , при ξ > 0 переходный процесс расходится |
|
> 0 |
|
|
Формулы гармонической линеаризации при исследовании переходных процессов имеют некоторую особенность по сравнению с формулами для исследования автоколебаний.
Первая «гармоника» (затухающая или расходящаяся) нелинейной
функции F(x) при = |
( )sin |
( ) будет |
|
|
|
|
( ) |
|
|||
( ) = |
( ) + |
( |
) |
− |
= |
( |
) − |
|
( ) + |
(9) |
|
|
|||||||||||
где |
( |
) = |
1 |
( |
sin |
)sin |
|
(10) |
|||
|
( |
) = |
1 |
( |
sin |
)cos |
|
(11) |
|||
Следовательно, учитывая новую форму записи нелинейной функции, здесь можно целиком использовать прежние формулы для а(А) и b(А).
При рассмотрении автоматических систем с нелинейными корректирующими сигналами коэффициенты гармонической линеаризации, как правило, являются функциями, прежде всего, частоты колебаний системы и лишь в некоторых случаях — функциями еще и амплитуды колебаний.
Новая усложненная формула гармонической линеаризации для колебательных переходных процессов характеризуется наличием члена
− ( ) , которого не было в выражении, пользуемом при исследовании
5

автоколебаний. Отношение определяет собой быстроту затухания (при ξ < 0)
или расхождения (при ξ > 0) амплитуды колебаний за один «период».
Если значения |
|
|
малы, то в системе при начальном возмущении будут |
|
|||
иметь место медленно |
затухающие или расходящиеся колебания; если же |
||
значения достаточно велики, то переходный процесс будет быстро
сходящимся или расходящимся.
При исследовании переходных процессов в нелинейных системах первого класса, после замены нелинейного уравнения звена формулой гармонической линеаризации, уравнение системы будет иметь вид
( ) + ( ) ( )+ |
− |
( ) = 0 |
(12) |
Значения ξ(A) и ω(A) из этого уравнения могут определяться различными способами. Часто наиболее удобным является использование формул, связывающих между собой коэффициенты характеристического уравнения и параметры переходного процесса.
В частности, для нелинейной системы 3-го порядка будет
= − |
|
− |
(13) |
|
2[ |
+ ( +2 ) ] |
(14) |
||
= |
+2 |
− |
|
|
Наиболее целесообразно данные уравнения решать графически или методом последовательных приближений. Методика их практического использования будет рассмотрена ниже. Иногда для оценки эффекта от включения в систему нелинейного корректирующего устройства неудобно формулы гармонической линеаризации применять в том виде, в котором они были рассмотрены выше.
Для упрощения расчетов преобразуем формулу гармонической линеаризации к другому виду.
Для этого при синусоидальном характере напряжения на входе нелинейного звена = sin основную гармонику напряжения на выходе звена будем искать в виде решения дифференциального уравнения
|
|
|
+ |
= |
|
(15) |
или |
|
|
||||
|
= |
1+ |
|
|
(16) |
|
|
|
6 |
|
|||

где k*, Т* — искомые параметры звена, т. е. «эквивалентный» коэффициент усиления и «эквивалентная» постоянная времени.
Очевидно, что уравнения (2) и (16) должны иметь одинаковые амплитудно-фазовые характеристики. Поэтому эквивалентные коэффициент усиления k* и постоянную времени Т* можно определить непосредственно из уравнения (16) Уравнение (2) запишем в виде
|
|
|
|
|
|
= |
|
( |
) |
|
+ |
|
( |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
(17) |
||||||||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
) |
|
|
|
|
|
|
|
|
|
|
|
|
(18) |
|||||
|
|
полученные значения у и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Подставим |
|
|
|
|
= |
( |
|
|
) |
|
|
+ |
|
|
|
|
|
|
|
в уравнение |
|
|
|
|||||||||||||||
|
|
|
|
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ) |
|
|
|
|
|
|
(19) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Переменная( х)и ее+производные+имеют( ) |
|
вид |
= |
|
|
|
||||||||||||||||||||||||||||||||
+ |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
(20) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
производных (20) в уравнение (19), найдем |
|||||||||||||||||||||||||||
Подставляя значения х и его= − |
( |
|
sin |
+ |
|
( )cos |
= sin |
|
||||||||||||||||||||||||||||||
( ) cos |
− ( |
) |
sin |
|
|
+ |
|
|
|
)sin |
|
(21) |
||||||||||||||||||||||||||
Разделяя члены с синусами и косинусами, получим систему уравнений |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
− |
|
|
( |
|
|
) |
+ |
+ |
|
( |
|
|
) = 0 |
|
|
|
|
|
|
|
|
(22) |
|||||||||||
Отсюда |
|
|
|
|
( |
|
) |
|
( |
) |
− |
|
|
|
|
= 0 |
|
|
времени и коэффициент |
|||||||||||||||||||
|
определим эквивалентные |
постоянную |
||||||||||||||||||||||||||||||||||||
усиления: |
|
|
|
|
|
|
|
|
|
|
|
|
= − |
1 |
|
( ) |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( () |
) |
|
|
|
|
|
|
|
(23) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
) |
|
|
|
|
|
|
|
|
|||
Эквивалентное уравнение |
инерционного звена, следовательно, имеет вид |
|||||||||||||||||||||||||||||||||||||
|
|
|
= |
|
( |
|
)+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
7

( |
) + |
|
( |
) |
(24) |
|||
|
( |
) |
|
|||||
= |
1 − |
1 |
|
|
( |
) |
|
|
|
|
|
|
( |
) |
|
||
Уравнение (25) позволяет оценить, как изменяются при включении нелинейного корректирующего устройства эквивалентные параметры звена — его коэффициент усиления k* и постоянная времени T*.
Методика анализа различного типа систем будет рассмотрена ниже на конкретных примерах. Определение параметров нелинейных автоматических систем с учетом требуемого качества переходных процессов целесообразно производить после построения диаграмм качества затухания нелинейных переходных процессов.
Диаграмма качества затухания представляет собой семейства линий равного затухания = const и линий равного значения частоты колебаний = const, построенные на плоскости в прямоугольных координатах. Одной из координат является амплитуда колебаний системы, другой — параметр, выбором которого желательно получить необходимое качество переходного процесса. Диаграмма затухания нелинейных процессов показывает, как изменяются постоянная времени переходного процесса и частота колебаний системы при изменении амплитуды колебаний.
Диаграмма затухания переходных процессов, построенная для различных интервалов введения нелинейных динамических корректирующих сигналов, позволяет определить такие важные для практики параметры системы, как время затухания переходного процесса t1 число колебаний m в переходном процессе за время t1, величину перерегулирования хпр и т. д.
В частности, время затухания переходного процесса на заданном интервале (от амплитуды A0 до А1) определяется выражением
= |
( ) |
(25) |
|
В большинстве практических случаев зависимость ( ) имеет достаточно сложный вид, и точное определение величины интеграла связано со значительными затруднениями.
В данном случае t1 можно определять в виде = ∑
причем
8
= |
|
|
= |
1 |
|
2 |
ln |
+ |
(26) |
|
|
|
|||||||
Число колебаний в переходном( ) |
+ |
|
|
|
|||||
процессе за время t1 будет |
|
||||||||
= |
1 |
( |
) |
|
|
|
(27) |
||
2 |
( |
) |
|
|
|
|
|||
Пользуясь средними значениями ξср и ωcp на всем данном участке (от А0 до A1), можно получить грубо приближенно число колебаний
= |
|
ln |
|
= |
(28) |
2 |
|
2 |
|||
|
Если нужно, чтобы процесс затухал за одно колебание, то m = 1 и необходимые средние значения будут
= |
1 |
ln |
|
или |
= |
2 |
(29) |
|
|
||||||
2 |
|
|
|
|
Все эти соотношения могут быть легко использованы как при оценке процессов в заданной системе, так и при выборе параметров вновь проектируемой системы.
2.2. Системы с переменным демпфированием в цепи обратной связи
Для улучшения динамических свойств во время переходного процесса в этих системах автоматически изменяются параметры цепи обратной связи.
2.2.1. Схемы с коэффициентом демпфирования, изменяющимся пропорционально ошибке системы.
Улучшение переходного процесса в следящих системах может быть достигнуто при помощи введения в систему дополнительной обратной связи с изменяющимся коэффициентом усиления. При использовании такой обратной связи при больших отклонениях системы демпфирование мало. По мере приближения выходной величины к установившемуся значению демпфирование увеличивается, и перерегулирование уменьшается.
Структурная схема рассматриваемой системы с нелинейной обратной связью показана на рис. 2, а.
9
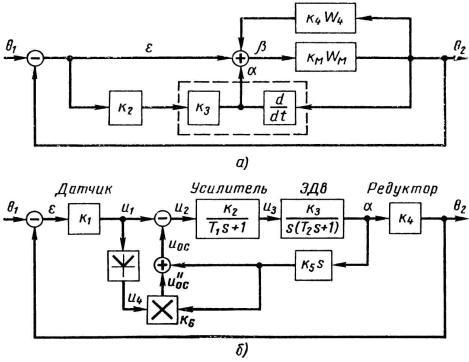
Рис. 2. Структурные схемы систем управления с нелинейной обратной связью: а — с двумя тахогенераторами; б — с одним тахогенератором и блоком
перемножения
В системе имеются два тахогенератора, включенных навстречу друг другу. Разность их напряжений является сигналом обратной связи. После усиления напряжение, пропорциональное модулю сигнала ошибки |ε|, запитывает обмотку возбуждения одного из тахогенераторов. В результате на выходе этого тахогенератора в начале переходного процесса при большом отклонении возникает большое напряжение а. Когда система подойдет к установившемуся состоянию, это напряжение уменьшится.
Другой тахогенератор, соответствующий линейной обратной связи, соединен последовательно с тахогенератором нелинейной обратной связи. Выходное напряжение тахогенератора нелинейной обратной связи вычитается из выходного напряжения другого тахогенератора. Сигнал обратной связи в начале переходного процесса, когда ошибка возрастает, уменьшается, а по мере убывания ошибки — увеличивается. Это приведет к тому, что система будет быстро отрабатывать большие отклонения. По мере приближения системы к положению равновесия скорость отработки уменьшается. Это способствует уменьшению перерегулирования.
Переходные процессы в системе (рис. 2, б) описываются системой уравнений
= − ; = ; = − ;
(30)
( +1) =
10