

Учебное пособие 1050
.pdfКонтрольные вопросы:
1)Какое движение точки называют сложным, абсолютным, переносным и относительным? Поясните на примере решённой Вами задачи.
2)Сформулируйте теоремы сложения скоростей и ускорений при сложном движении точки. Как Вы применяли их при решении задач?
3)Как найти величину и направление ускорения Кориолиса? Поясните на примере решённой Вами задачи.
4)В каких случаях ускорение Кориолиса обращается в ноль? Приведите примеры.
5)Методика выполнения работы.
ЛАБОРАТОРНАЯ РАБОТА № 2
Определение кинематических характеристик плоского механизма графоаналитическими методами (план скоростей, план ускорений).
Цель работы: научиться определять кинематические характеристики движения точек и звеньев плоского механизма с помощью геометрической интерпретации теорем сложения скоростей и ускорений при плоском движении тела.
Порядок выполнения работы:
1.Схемы механизмов приведены на рис. ЛР2.1–ЛР2.3, дополнительные условия – в табл. ЛР2. В некоторых вариантах задаются параметры вращательного движения одного из звеньев, а в некоторых – поступательного движения одного из точек механизма. Для заданного положения механизма требуется определить скорости и ускорения точек B и М .
2.Построить механизм в соответствии з заданными значениями длин звеньев и углов в масштабе.
3.Используя план скоростей геометрически определить скорости точек механизма и угловые скорости его звеньев. В соответствии с условием задачи либо предварительно вычислить, либо сразу провести из произвольного полюса O скорость точки A в соответствии с назначенным масштабом. Последователь-
но применяя к точкам механизма теорему сложения скоростей при плоском движении тела
vB vA vBA ,
и геометрические правила сложения векторов, определить скорости точек тела. Их значения снимаются с чертежа с помощью линейки и пересчитываются с учетом выбранного масштаба
Учитывая связь
vBA AB , 11
вычислить угловые скорости звеньев.
4. Аналогично п. 2–3 с помощью геометрической интерпретации теоремы сложения ускорений
aB aA aBA
определить значения ускорений точек механизма. Из соотношения (и идентичных ему)
aBA AB
вычислить угловые ускорения звеньев.
Таблица ЛР2
варианта №-
1
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
vА , |
а А , |
OA , |
OA , |
AB , |
AМ , |
AO , |
BМ , |
||
см/с |
см/с2 |
с-1 |
с-2 |
см |
см |
|
|
см |
см |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
8 |
9 |
50 |
20 |
|
|
50 |
40 |
|
|
|
|
|
|
5 |
4 |
|
|
|
|
10 |
|
|
|
|
10 / |
3 |
|
|
|||
|
|
4 |
6 |
|
|
|
|
20 |
|
|
|
|
20 / |
3 |
|
||||
|
|
3 |
2 |
|
10 |
|
|
15 |
10 |
|
|
8 |
6 |
|
3 |
|
|
5 |
2 |
40 |
20 |
|
|
|
10 |
|
|
40 |
|
|
|
2 |
3 |
|
20 |
|
|
50 |
|
|
|
7 |
1 |
|
15 |
|
|
30 |
|
|
|
4 |
5 |
|
30 |
|
|
40 |
10 |
|
|
3 |
8 |
|
5 |
|
|
25 |
|
30 |
40 |
|
|
|
40 |
|
|
|
10 |
|
|
2 |
7 |
|
25 |
|
|
50 |
25 |
25 |
10 |
|
|
|
40 |
|
|
|
40 |
40 |
15 |
|
|
|
25 |
|
|
|
75 |
|
|
6 |
3 |
|
4 |
|
|
10 |
1 |
|
|
5 |
9 |
|
20 |
|
|
40 |
20 |
|
|
4 |
5 |
|
10 |
|
|
20 |
|
|
|
7 |
8 |
|
40 |
|
|
50 |
|
30 |
20 |
|
|
50 |
10 |
|
|
|
|
|
|
3 |
2 |
|
10 |
|
|
60 |
20 |
|
|
6 |
7 |
|
20 |
|
|
30 |
|
|
|
5 |
3 |
|
30 |
|
|
75 |
|
|
|
8 |
5 |
|
20 |
|
|
50 |
30 |
|
|
4 |
6 |
|
20 |
|
|
10 |
10 |
|
|
6 |
2 |
40 |
|
|
|
20 |
30 |
|
|
|
|
|
|
|
|
|
|
12

Рис. ЛР2.1
13
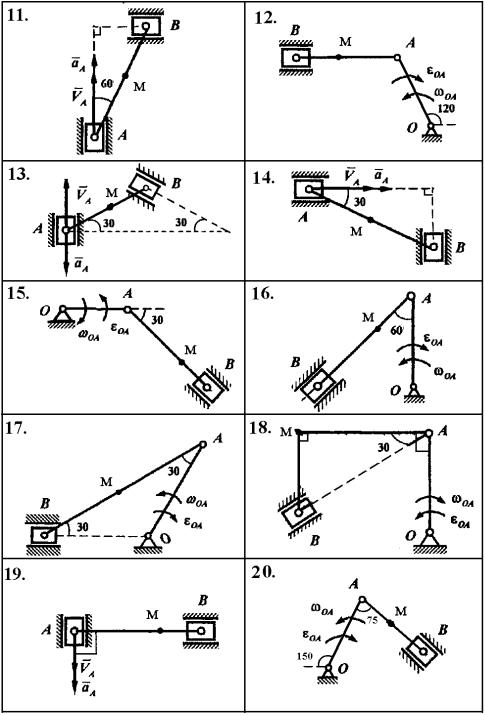
Рис. ЛР2.2
14
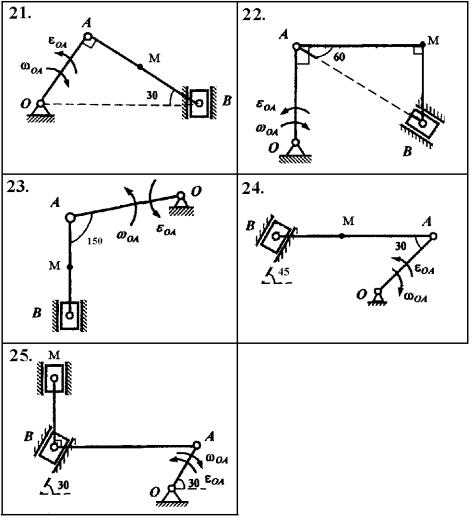
Рис. ЛР2.3
Контрольные вопросы:
1)Какое движение тела называют плоским?
2)Дайте две интерпретации плоского движения тела.
3)Запишите уравнения плоского движения. Чему равно число степеней свободы тела в этом случае?
4)Как вычисляются угловые характеристики вращательной части плоского движения тела?
5)Какой вид принимает теорема сложения скоростей в случае плоского движения тела? Как Вы применяли её при решении задач?
6)Что называют мгновенным центром скоростей? Способы определения его положения. Свойства МЦС. Как Вы находили положение МЦС и с его помощью определяли скорости точек тела при решении задач?
7)Какой вид принимает теорема сложения скоростей в случае плоского движения тела? Как Вы применяли её при решении задач?
8)Какой вид принимает теорема сложения ускорений в случае плоского движения тела? Как Вы применяли её при решении задач?
15
9)Что называют мгновенным центром ускорений? Способы определения его положения. Свойства МЦУ.
10)Методика выполнения работы.
ЛАБОРАТОРНАЯ РАБОТА № 3
Определение центра масс плоского сечения, составленного из стандартных профилей
Цель работы: научиться определять положение центра масс плоской фигуры, составленной из стандартных профилей.
При рассмотрении движения твердых тел и других механических систем большое значение имеет точка, называемая центром масс. Если механическая система состоит из N материальных точек с массами m1, m2 ,..., mN , радиусы-
векторы которых r1 , r2 ,..., rN , проведенные из одной и той же точки O , то центром масс называется геометрическая точка C , радиус-вектор которой rC определяется выражением:
r N mk rk ,
C
k 1 M
N
где M mk – масса системы.
k1
Впроекциях на декартовы оси координат получим следующие формулы
для координат центра масс:
|
N |
mk xk |
|
|
N |
mk yk |
|
|
N |
mk zk |
|
|
xC |
|
, |
yC |
|
, |
zC |
|
. (1) |
||||
|
|
|
||||||||||
|
k 1 |
M |
|
k 1 |
M |
|
k 1 |
M |
||||
|
|
|
|
|
|
|
|
|
||||
Центр масс является не материальной точкой, а геометрической. Он может не совпадать ни с одной материальной точкой системы, как, например, в случае кольца. Центр масс системы характеризует распределение масс в системе.
Если механическая система представляет собой сплошное тело, то его разбивают на элементарные частицы с бесконечно малыми массами dm и с изменяющимися от частицы к частице радиусом-вектором r .
Суммы в пределе переходят в интегралы:
|
|
|
|
|
|
dm |
, |
|
|
xdm |
, |
|
|
ydm |
|
|
|
zdm |
|
|
|
|
|
|
|
r |
x |
|
y |
|
, |
z |
|
, |
|
||||||||
r |
|
||||||||||||||||||||
|
|
|
|
|
M |
|
M |
|
|||||||||||||
|
C |
|
M |
C |
M |
C |
|
C |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где M dm – масса тела. |
|
|
|
|
|
|
|
|
|
||||||||||||
Для однородных сплошных тел dm dV , |
M V , |
где – плотность те- |
|||||||||||||||||||
ла, общая для всех элементарных частиц, dV – объем элементарной частицы, V
– объем тела.
Для тел типа тонкого листа, которые можно принять за однородные материальные поверхности, dm S dS , M S S , где S – поверхностная плотность,
16
dS – площадь поверхности элементарной частицы; S – площадь поверхности.
Для |
тонкой проволоки, которую можно |
принять за отрезок линии, |
dm l dl , |
M ll , где l – линейная плотность, dl |
– длина элемента линии; l – |
длина отрезка линии.
В этих случаях определение центра масс тел сводится к вычислению центра масс объемов, площадей и длин линий соответственно.
Порядок выполнения работы:
1.Механическая система состоит из набора стандартных профилей: двутавров, швеллеров и уголков (см. рис. 2–4). Их геометрические параметры приведены в:
ГОСТ 8239-89. Балка двутавровая; ГОСТ 8240-97. Швеллеры; ГОСТ 5810-86. Уголки неравнобокие.
ГОСТ 8509-93. Уголки равнобокие.
Ознакомившись с механической системой (рис. Л3.1 – Л3.3), провести поиск соответствующих ГОСТов и выбрать из них необходимые характеристики профилей.
2.Преобразовать формулы (1) в соответствии с видом тел: объемные, поверхности, отрезки.
3.Изобразить систему в соответствии геометрией тел, используя таблицы сортамента, в масштабе.
17

Рис. Л3.1
18
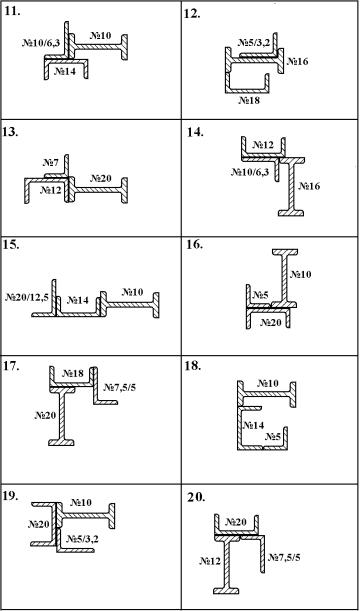
Рис. Л3.2
19
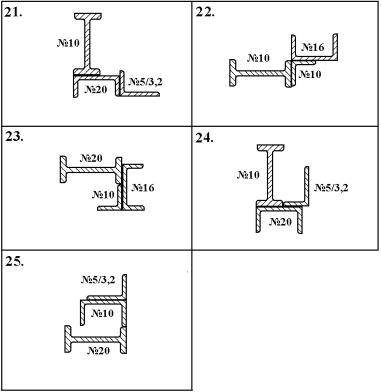
Рис.Л3.3
4.Выбрать метод определения центра тяжести: метод симметрии, метод разбиения на части (метод группировки), метод отрицательных масс (метод дополнений), метод интегрирования.
5.Определить положение цента масс системы, используя таблицы сор-
тамента.
Контрольные вопросы:
1)Дайте определение центра масс системы.
2)Как рассчитать положение центра масс твердого тела?
3)Как преобразуются формулы для определения центра масс в случае однородных сплошных тел, тел типа тонкого листа и тонкой проволоки?
4)Методы определения центра тяжести: метод симметрии, метод разбиения на части (метод группировки), метод отрицательных масс (метод дополнений), метод интегрирования.
5)Центры масс простейших тел: прямолинейный отрезок; кольцо; дуга окружности; треугольник; параллелограмм (прямоугольник, ромб, квадрат); круг (сектор круга, круговой сегмент); «трапеция»; «кольцевой сегмент»; «пирамида»; «конус»; «полушар».
6)Центры масс стандартных профилей: двутавр, швеллер, уголок. Таблицы сортамента.
7)Методика выполнения работы.
20