

Методическое пособие 827
.pdf13.2.3. Расчет скоростей и усилий механизмов управления рабочим оборудованием одноковшового гидравлического экскаватора
Управление рабочим оборудованием одноковшового гидравлического экскаватора осуществляется с помощью гидроцилиндров поворота ковша, ру- кояти и стрелы. Поэтому предметом данной задачи является определение ско- рости движения штока цилиндра Vшц и усилия на нем Ршц при управлении соот- ветствующим элементом рабочего оборудования (ковшом, рукоятью или стре- лой) по схеме на рис. 13.4.
Рис. 13.4. Принципиальная схема привода гидродвигателей исполнительных механизмов гидравлического экскаватора (условные обозначения см. на рис. 13.3)
91
Исходные данные:
•частота вращения двигателя привода насоса – nдв, мин-1;
•передаточное число редуктора привода насоса – iрн;
•давление, развиваемое насосом – pн, МПа;
•постоянная насоса – qн, см3/об;
•объемный к. п. д. насоса – ηоб. н.;
•диаметр поршня гидроцилиндра – dпц, м;
•количество гидроцилиндров – n;
•суммарные потери давления в гидросистеме – ∆pΣ, МПа;
•суммарный объемный к. п. д. гидросистемы – ηоб.Σ.
Значения этих показателей для экскаваторов ЭО-5124 и ЭО-6123 приве- дены в табл. П9 приложения.
Порядок расчета.
1. Определение производительности гидронасоса:
|
Q = |
1 |
n q |
|
η |
|
, (м3/с), |
|||
|
|
н |
об.н. |
|||||||
|
н |
|
6 107 |
н |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
где nн – частота вращения вала насоса (nн = nдв / iрн). |
||||||||||
2. |
Определение давления рабочей жидкости в гидроцилиндрах: |
|||||||||
|
|
|
рц = рн – ∆рΣ, (МПа). |
|||||||
3. |
Определение величины подачи рабочей жидкости в гидроцилиндры: |
|||||||||
|
|
Q = Q η |
об.Σ . |
, (м3/с). |
||||||
|
|
|
ц |
н |
|
|
|
|||
4. |
Определение площади поршня гидроцилиндра: |
|||||||||
|
π d |
2 |
|
|
F = |
пц |
= 0, 785d 2 |
, (м2). |
|
|
||||
пц |
4 |
|
пц |
|
|
|
|
|
|
5. |
Определение скорости движения штоков гидроцилиндров: |
||
|
Vшц = |
Qц |
, (м/с). |
|
n Fпц |
||
|
|
|
|
6. |
Определение суммарного усилия на штоках гидроцилиндров: |
||
|
Ршц = n рц Fпц , (МН). |
||
13.3. ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ
При выполнении работы используется стенд одноковшового гидравличе- ского экскаватора и макет объёмного гидропривода.
13.3.1. Используя стенд экскаватора, макет гидропривода, плакаты, кино- фильм и лабораторный практикум, изучить гидрооборудование, гидравличе- ские схемы приводов исполнительных механизмов экскаватора и методику рас- чёта их скоростей и усилий.
92
13.3.2.Выполнить принципиальную однопоточную схему гидропривода экскаватора с групповым питанием гидродвигателей.
13.3.3.Произвести расчёт скоростей и усилий механизмов управления ра- бочим оборудованием одноковшового гидравлического экскаватора по данным п. 13.3.2 и варианту задания приложения табл. П9.
13.4.ФОРМА ОТЧЁТА
13.4.1.Цель работы.
13.4.2.Гидрооборудование одноковшового гидравлического экскаватора.
13.4.3.Принципиальная однопоточная гидравлическая схема экскаватора
сгрупповым питанием гидродвигателей.
13.4.4.Расчёт скоростей и усилий исполнительных механизмов управле- ния рабочим оборудованием одноковшового гидравлического экскаватора.
13.4.5.Формулирование кратких выводов по лабораторной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Перечислите группы гидрооборудования одноковшового гидравличе- ского экскаватора.
2.Что входит в аппаратуру управления гидроприводом экскаватора?
3.Поясните роль редукционного клапана в гидросхеме.
4.Что значит однопоточная гидравлическая схема?
5.Как можно регулировать с помощью гидросхемы скорость исполни- тельного механизма экскаватора?
6.Перечислите типы клапанов в гидравлической схеме.
7.Что такое постоянная гидравлического насоса?
8.Что влияет на усилие, развиваемое штоком гидроцилиндра?
9.Как осуществляется защита гидролиний от перегрузки?
10.Поясните функцию обратного клапана в гидросхеме.
ЛАБОРАТОРНАЯ РАБОТА №14
ИЗУЧЕНИЕ КЛАССИФИКАЦИОННЫХ ПРИЗНАКОВ, РАБОЧЕГО ПРОЦЕССА И КОНСТРУКЦИЙ ЭКСКАВАТОРОВ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
14.1. ЦЕЛЬ РАБОТЫ
Цель работы заключается в изучении классификационных признаков, ра- бочего процесса, основных типов, индексации и общего устройства экскавато- ров непрерывного действия.
93
14.2.ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
14.2.1.Рабочий процесс экскаваторов непрерывного действия
Спецификой рабочего процесса экскаваторов этого класса является его не-
прерывность, которая обеспечивается многоковшовым типом рабочего органа и переносным движением рабочего органа путем перемещения машины или пово- ротом роторной стрелы. Одновременно с разработкой грунта осуществляется его транспортирование в отвал или транспортное средство.
14.2.2. Классификационные признаки экскаваторов непрерывного действия
Основные классификационные признаки приведены в табл. 14.1.
|
|
|
|
|
Таблица 14.1 |
|
|
Классификация экскаваторов непрерывного действия |
|
||||
|
|
|
|
|
|
|
Признак классификации |
|
|
|
|||
Характер |
|
Тип |
|
|
|
|
перемещения |
|
|
Индекс |
Наименование |
|
|
|
рабочего |
Назначение |
|
|||
рабочего |
|
органа |
|
|
|
|
органа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Цепной |
Траншейные |
ЭТЦ |
Цепные траншейные экска- |
|
Продольное |
|
ваторы |
|
|||
копание |
|
Роторный |
Траншейные |
ЭТР |
Роторные траншейные экс- |
|
|
|
каваторы |
|
|||
|
|
|
|
|
|
|
Поперечное |
|
Цепной |
Карьерные |
ЗМ |
Цепные экскаваторы |
попе- |
копание |
|
речного копания |
|
|||
|
|
|
|
|
||
Радиальное |
|
Роторный |
Карьерные |
ЭР |
Роторные стреловые |
экска- |
копание |
|
|
|
|
ваторы |
|
Структура индексов экскаваторов непрерывного действия представлена на рис. 14.1.
14.2.3. Общее устройство экскаваторов непрерывного действия
Основными функциональными элементами экскаваторов непрерывного действия являются:
1)ходовое оборудование (гусеничное или колёсное);
2)рама или поворотная платформа с кабиной машиниста, силовой ус- тановкой и механизмами;
3)рабочее оборудование многоковшовое (цепное или роторное);
4)транспортирующее устройство.
Основными исполнительными механизмами экскаваторов непрерывного действия являются:
1)механизм передвижения машины;
2)механизм привода рабочего органа;
3)механизм подъема - опускания рабочего органа;
94

4)механизм привода устройства для транспортирования грунта;
5)механизм поворота платформы с рабочим органом (только у ЭР).
Рис. 14.1. Структура индексов экскаваторов непрерывного действия продольно- го (а), поперечного и радиального (б) копания
95

У экскаваторов типа ЭТ и ЭМ разработка грунта обеспечивается одно- временной работой механизмов привода рабочего органа, передвижения маши- ны и привода транспортирующего устройства. У экскаваторов типа ЭР ради- альное копание осуществляется совмещенной работой механизмов привода ро- тора, поворота стрелы и транспортирующего устройства. В качестве основного транспортирующего средства у экскаваторов непрерывного действия исполь- зуются, как правило, ленточные конвейеры. Иногда их дополняют барабанны- ми метателями.
С помощью механизма подъема-опускания рабочего органа (канатно- блочного или гидравлического) у экскаваторов типа ЭТ осуществляется пере- вод рабочего органа из транспортного положения в рабочее и наоборот, а также установка нужной глубины траншеи. У экскаваторов типа ЭМ этот механизм регулирует величину подачи на забой, т. е. толщину срезаемой стружки грунта. У экскаваторов типа ЭР с помощью этого механизма осуществляется переход с одного уступа разработки грунта на другой.
Общие виды экскаваторов непрерывного действия вышеназванных типов представлены на рис 14.2…14.6.
Рис. 14.2. Экскаватор ЭТЦ-165:
1 – рама; 2 – рабочий орган; 3 – редуктор привода; 4 – приводной вал; 5 – гидромеханический ходоуменьшитель; 6 – трактор МТЗ-82;
7 – гидросистема; 8 – бульдозер
96
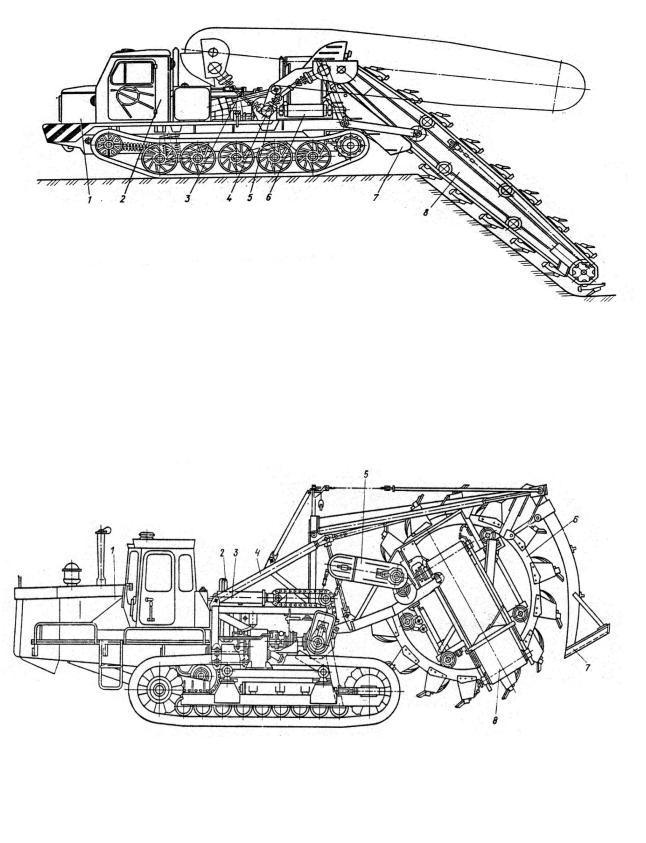
Рис. 14.3. Экскаватор ЭТЦ-252А:
1 – силовая установка; 2 – кабина; 3 – гидросистема; 4 – трансмиссия; 5 – механизм подъема и опускания рабочего органа;
6 – конвейер; 7 – лоток; 8 – рабочий орган
Рис. 14.4. Экскаватор ЭТР-223:
1 – тягач; 2,3,4 – механизмы подъема-опускания рабочего органа; 5 – привод ротора; 6 – рабочий орган (ротор); 7 – зачистное устройство;
8 – конвейер
97

Рис. 14.5. Экскаватор ЭМ-302:
1, 3 – планирующие звенья; 2,5 – нижняя и верхняя ковшовые рамы; 4 – стойка; 6 – привод ковшовой цепи; 7 – отвальный конвейер; 8 – нижняя
платформа; 9 – механизм передвижения; 10 – кабельный барабан
Рис. 14.6. Роторный стреловой экскаватор ЭР-1001: 1 – ротор; 2 – стрела; 3 – гидроцилиндр подъема стрелы;
4 – приемный конвейер; 5 – механизм привода ротора; 6 – пилон; 7 – гусеничный ход; 8 – опорно-поворотное устройство; 9 – поворотная
платформа; 10 – механизм поворота платформы; 11,13 – нижняя и верхняя секции отвального конвейера; 12 – дизель-генераторная станция;
14,15 – механизмы подъема и поворота отвального конвейера
98
14.3.ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ
14.3.1.Используя плакаты, кинофильм и лабораторный практикум, изу- чить рабочий процесс, классификационные признаки, индексацию и общее уст- ройство экскаваторов непрерывного действия.
14.3.2.Выполнить классификационную таблицу экскаваторов непрерыв- ного действия.
14.3.3.Описать общее устройство экскаваторов непрерывного действия.
14.4.ФОРМА ОТЧЁТА
14.4.1.Цель работы.
14.4.2.Рабочий процесс экскаваторов непрерывного действия.
14.4.3.Классификационная таблица экскаваторов непрерывного действия.
14.4.4.Структура индексов экскаваторов непрерывного действия.
14.4.5.Общее устройство экскаваторов непрерывного действия.
14.4.6.Формулирование кратких выводов по лабораторной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.За счёт чего обеспечивается непрерывность рабочего процесса экска- ваторов ЭТЦ, ЭТР, ЭМ, ЭР.
2.Перечислите основные классификационные признаки экскаваторов непрерывного действия.
3.Расшифруйте индексы экскаваторов ЭТЦ-201, ЭМ-302, ЭР-0252.
4.Перечислите основные функциональные элементы экскаваторов не- прерывного действия.
5.Перечислите основные исполнительные механизмы экскаваторов не- прерывного действия.
6.Перечислите преимущества и недостатки ЭТР в сравнении с ЭТЦ.
7.Совмещением работы каких механизмов обеспечивается процесс раз- работки грунта экскаваторами непрерывного действия?
ЛАБОРАТОРНАЯ РАБОТА №15
ИЗУЧЕНИЕ КИНЕМАТИЧЕСКИХ СХЕМ ЭКСКАВАТОРОВ НЕПРЕРЫВНОГО ДЕЙСТВИЯ И РАСЧЁТ ПО НИМ СКОРОСТЕЙ И УСИЛИЙ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ
15.1. ЦЕЛЬ РАБОТЫ
Цель работы заключается в изучении кинематических схем приводов ис- полнительных механизмов экскаваторов непрерывного действия и освоении методики расчётов по ним скоростей и усилий механизмов..
99

15.2.ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
15.2.1.Кинематические схемы приводов исполнительных механизмов экскаваторов непрерывного действия
Структура кинематических схем определяется типом привода экскаватора – одномоторный или многомоторный и включает в себя двигатель или группу двигателей, передаточный механизм, состоящий из комбинации различных ти- пов механических передач, гидравлических передач, электрических и комбини- рованных, а также элементов управления ими в виде муфт, тормозов и аппара- туры управления.
Кинематические схемы основных типов строительных экскаваторов не- прерывного действия представлены на рис. 15.1…15.5.
Рис. 15.1. Кинематическая схема экскаватора ЭТЦ-252:
1, 2 – насосы; 3, 4 – гидромоторы; 5 – звездочки; 6 – направляющие колеса
100