

Методическое пособие 687
.pdfЛАБОРАТОРНАЯ РАБОТА № 6. ИСПЫТАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Цель работы
1.Изучить принцип работы и устройство асинхронного двигателя с короткозамкнутым ротором. Ознакомиться с паспортными данными машины, приборами и аппаратурой, применяемой при испытании двигателя.
2.Определить начала и концы фаз обмотки статора. Осуществить пуск двигателя в ход и изменить направление его вращения.
3.Измерить активное сопротивление фаз обмотки
статора.
4.Снять и построить характеристики холостого хода.
5.Снять и построить характеристики короткого замыкания.
6.По данным опытов холостого хода и короткого замыкания построить упрощенную круговую диаграмму и по ней - рабочие характеристики двигателя.
Теоретические пояснения
Асинхронные двигатели с короткозамкнутым ротором состоят из статора и ротора. Сердечники статора и ротора набираются из изолированных друг от друга листов электротехнической стали. В пазы статора укладывается обмотка, изготовленная из изолированных медных проводников в виде катушек. Катушки соединяются между собой в отдельные фазы. В двигателях трехфазного
61
исполнения фазы могут быть соединены в треугольник или в звезду в зависимости от величины напряжения питания.
В пазах ротора располагаются алюминиевые или медные стержни, концы которых с обоих торцов ротора соединены короткозамкнутыми кольцами из того же материала, то есть получается короткозамкнутая обмотка в виде беличьей клетки.
При включении обмотки статора в сеть трехфазного тока в машине возбуждается вращающееся магнитное поле. Его частота вращения:
n1 |
|
60 |
f1 |
(6.1) |
p |
|
|||
|
|
|
|
где n1 – синхронная частота вращения магнитного поля, об/мин;
f1 – частота напряжения питания, Гц; p – число пар полюсов.
Частота вращения магнитного поля статора зависит от частоты f1, напряжения питания U1 и числа пар полюсов р обмотки статора. При вращении магнитного поля в обмотках статора и ротора индуктируются электродвижущие силы (э.д.с). В короткозамкнутых проводниках ротора возникают токи. В результате взаимодействия этих токов с магнитным полем создается электромагнитный момент, под действием которого ротор вращается в том же направлении, что и магнитное поле. При синхронной частоте вращения ротора электромагнитный момент равен нулю, так как в проводниках короткозамкнутой обмотки э.д.с. индуктироваться не будет. Поэтому ротор двигателя вращается относительно магнитного поля с некоторым скольжением, величина
62

которого в относительных единицах определяется по формуле:
s |
n1 n |
(6.2) |
|
n1 |
|||
|
|
где n1 – синхронная частота вращения магнитного поля, об/мин;
n – частота вращения ротора об/мин.
Порядок выполнения работы
1. Определить начала и концы обмотки статора. Начала и концы фаз обмотки статора выведены на
панель стенда и обозначений не имеют. Поэтому вначале необходимо осуществить маркировку выводов обмотки статора. Предварительно необходимо найти выводы, принадлежащие одной фазе. Для этого собирается схема, показанная на рис. 6.1.
K
S3 Л3
220 В
Рис. 6.1. Схема для маркировки фаз
К одному зажиму источника (220 В) через сигнальную лампочку (или вольтметр) подключается один из выводов обмотки. К другому зажиму источника питания присоединяется проводник-щуп. При нажатой кнопке «К», совмещенной с сигнальной лампочкой, по очереди касаются выводов обмотки статора. Загорание лампочки укажет га то, что в цепь включена одна из трех фаз обмотки статора.
63
Обозначим эти выводы а-а. Аналогично находятся выводы фаз b-b и c-c.
ВНИМАНИЕ! Напряжение подается нажатием кнопки «К» только тогда, когда конец щупа установлен на одном из выводов обмотки.
Для определения «начал» и «концов» фаз обмотки статора используем явление взаимоиндукции. Все три фазы обмотки статора имеют общий магнитопровод. Поэтому, если одну из фаз (например, а-а) подключить к источнику переменного тока, то она создает пульсирующее магнитное поле. Это поле «сцеплено» с фазами b-b и c-с и наводит в них электродвижущие силы (э.д.с.) Ев и Ес.
Если осуществить последовательное соединение фазовых обмоток b-b и с-с так, что э.д.с. Ев и Ес будут складываться, то подключенный к ним вольтметр покажет напряжение, равное сумме этих э.д.с. (при использовании сигнальной лампочки она должна загораться). Такое соединение называют согласным. Конец фазы b-b соединен с началом фазы с-с. Схема согласного соединения фаз показана на рис. 6.2.
Если осуществить последовательное соединение фаз b-b и c-с так, что э.д.с. Ев и Ес будут вычитаться, то вольтметр покажет минимальное напряжение (сигнальная лампочка не загорится). В этом случае соединение фазовых обмоток называют встречным и концы (или начала) фаз b-b и c-с соединены между собой (рис. 6.3).
64

220 В
220 В
Л3 
Л3 
S3
S3
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
a |
н |
|
|
|
|
aн |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
bк |
|
|
|
|
|
cк |
|
|
|
bк |
|
|
|
cк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
cн |
|
|
|
|
|
bн |
||
|
|
cн |
|
|
|
bн |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
aк |
|
|||||
|
|
|
aк |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 6.2. Схема согласного |
Рис. 6.3. Схема встречного |
|||||||||||||||
соединения фаз |
|
|
|
|
соединения фаз |
|||||||||||
Для определения начала и конца третьей фазы надо подключить к источнику питания переменного тока (220 В) фазу b-b (или с-с), а фазы a-a и c-c (или b-b) соединить последовательно. По показаниям вольтметра определить, как включены фазы, согласно или встречно. Начала и концы фаз обозначить соответственно: С1, С2, С3 и C4, С5, С6.
2. Измерить активное сопротивление фазы обмотки статора в практически холодном состоянии
Измерение активного сопротивления фазы обмотки статора производится с помощью постоянного тока методом амперметра-вольтметра. Учитывая, что сопротивление фазы мало, опыт производят по схеме рис.6.4. При измерении сопротивления величину тока в фазе устанавливают равной 10 - 20 % от Iн, чтобы в процессе опыта обмотка заметно не нагревалась. Сопротивление определяется по формуле:
65
r |
U |
|
, Ом |
(6.3) |
|
|
|
||||
1 |
I |
U |
|
|
|
|
|
|
|
||
|
|
|
|
||
rv
где rv – сопротивление вольтметра, Ом.
Если сопротивление вольтметра rv значительно больше сопротивления r1 (rv > r1 100), то:
|
r U , Ом |
|
|
|
1 |
I |
|
|
R |
|
|
Л1 |
S4 |
A |
C1 |
|
|||
|
|
|
|
110 В |
V |
|
|
|
|
C6 |
C4 |
|
|
C5 |
|
|
|
C3 |
C2 |
Рис. 6.4. Схема для измерения активного сопротивления фазы обмотки
В общем, случае метод амперметра-вольтметра отличается невысокой точностью, ввиду влияния внутренних сопротивлений приборов. Для более точного измерения сопротивлений применяет методы сравнения мостовой и компенсационный.
Активное сопротивление фазы обмотки статора несколько больше его сопротивления постоянному току. Это объясняется тем, что плотность переменного тока распределяется неравномерно по сечению проводника из-за поверхностного эффекта (вытеснения тока к поверхности проводника). При частоте 50 Гц и малых площадях сечения
66
проводников обмотки статора, этой разницей обычно пренебрегают.
Во избежание повреждения вольтметр следует включать только по достижении установившегося значения тока в обмотке отключать перед каждым изменением тока.
Сопротивление должно быть измерено во всех трех фазах. За действительное сопротивление фазы принимается среднее арифметическое значение. При дальнейших расчетах и построении круговой диаграммы используется сопротивление фазы, приведенное к расчетной рабочей температуре 75 °С:
r |
r |
75 |
235 |
, Ом |
|
|||
|
|
|
|
(6.4) |
||||
|
|
235 |
||||||
75 |
|
|
|
|
||||
|
|
|
|
|
|
|||
где температура обмотки статора при опыте, равная примерно температуре окружающего воздуха, С;
r активное сопротивление, найденное при С, Ом.
Результаты измерений и расчётов заносятся в табл. 6.1. Таблица 6.1
U, В |
I, А |
r , Ом |
, С |
r75, Ом |
|
Примечание |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
rА75 rВ75 rС75 |
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
67
3. Осуществить пуск в ход асинхронного двигателя и изменить направление его вращения Наиболее простым способом пуска асинхронного
двигателя с короткозамкнутым ротором является прямой пуск, когда обмотка статора включается в сеть на номинальное напряжение. Пусковой ток достигает при этом значений порядка Iп = (4 7) I1н.
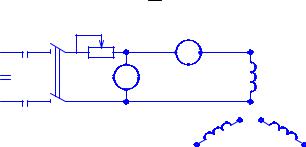
В данной работе пуск асинхронного двигателя осуществляется в следующем порядке. Собираем схему, как показано на рис. 6.5. Обмотка статора соединяется в звезду. Линейным пускателем Л1 подаем на стенд переменное напряжение (220 В). Выключателем S1 включаем индукционный регулятор (ИР). Устанавливаем на выходе ИР номинальное напряжение U1Н = 380 В, и двигатель без нагрузки пускаем в ход, включая выключатель S2. Заметим направление вращения ротора. Отключается двигатель от сети выключателем S2.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
* |
|
|
|
|
|
|
||
|
Л1 |
S1 |
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
C |
1 |
|||||||||
A |
|
ИР |
|
|
|
|
|
W |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
B |
|
|
|
|
|
|
|
|
|
V |
|
|
C2 |
|
|
|
С4 |
С6 |
|
P |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С5 |
|
|
||||
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.5. Схема пуска АД
Для изменения направления вращения ротора необходимо изменить порядок чередования фаз обмотки статора. При отключенном индукционном регуляторе (выключатели S2 и S1 разомкнуты) меняем местами два любых линейных провода на зажимах выключателя S2. Пускаем двигатель в ход и убеждаемся в том, что направление вращения ротора изменилось.
68
4. Снять характеристики холостого хода
Опыт холостого хода производится при работе двигателя без нагрузки на валу по схеме рис. 6.5. Обмотка статора соединена звездой.
Линейным пускателем Л1 подаем напряжение на стенд. Включаем S1 и устанавливаем на выходе ИР номинальное напряжение U1 = 380 В. Выключателем S2 пускаем в ход двигатель. По показаниям приборов убеждаемся, что двигатель работает нормально. Ток холостого хода асинхронных двигателей мощностью Р = 1 10 кВт ориентировочно равен
I0 = (0,2 0,5) I1н. |
(6.5) |
Устанавливаем напряжение ИР , равное U1 = U1н = 380 В и показания приборов записываем в таблицу 6.2. Уменьшая напряжение до U = 100 В, делаем еще несколько замеров (5 6 точек).
Таблица 6.2
Опытные данные |
Расчётные |
|
|||||
данные |
Примечание |
||||||
|
|
|
|||||
|
|
|
|
|
|
||
U1, В |
I0, А |
PW, Вт |
P0, Вт |
|
cos 0 |
||
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 = 380 В |
|
|
|
|
|
|
|
f1 = 50 Гц |
|
|
|
|
|
|
|
||
|
Необходимые |
расчетные данные таблицы 6.2 |
|||||
определяются так: |
|
|
|||||
Мощность холостого хода |
|
|
|||||
|
|
P0 3 PW |
|
(6.6) |
|||
69

Коэффициент мощности при холостом ходе
cos 0 |
|
|
|
P0 |
(6.7) |
|
|
|
|
||||
3 U1 I0 |
||||||
|
|
|
|
|||
По данным таблицы 6.2. построить характеристики холостого хода Р0(U1), I0(U1), cos 0(U1), общий вид которых показан на рис. 6.6. Объяснить вид полученных кривых.
По результатам опыта при номинальном напряжении (U1 = 380 В) производим разделение потерь холостого хода на электрические - Рэл, потери в стали - Рс и механические - Рмех. Электрические потери равны:
P |
m I2 |
r |
(6.8) |
|
эл |
1 |
0 |
|
|
Для разделения потерь Рс |
и Рмех |
строим зависимость |
||
Pc Pмех U12 , как показано на рис. 6.7. Эта зависимость близка к прямой, так как кривая Pc Pмех U12 представляет собой квадратичную параболу для слабонасыщенных машин (Pс
U1, Рмех = const).
Порядок построения этой зависимости следующий. По оси абсцисс откладываем значения U12 в относительных единицах. Для каждого замера опыта холостого хода определяем электрические потери и по оси ординат откладываем величину потерь Pc Pмех P0 Pэл . Продолжив прямую Pc Pмех U12 до пересечения с осью ординат,
получим отрезок ОД. Тогда для U1 = 1,0 имеем Рмех = АВ и Рс = BC.
70