

Методическое пособие 687
.pdf
|
|
|
|
C1 |
C4 |
1 |
|
C1 |
|
A1 |
C2 |
C5 |
2 Т |
|
|
|
V1 |
C3 |
C6 |
3 |
|
|
|
|
|
|
|
S2 |
ОВГ |
С4 |
C2 |
P4 |
P1 |
|
С6 |
|
|
|
|
||
|
|
С5 |
|
|
|
|
|
|
|
|
P5 |
P2 |
|
|
C3 |
|
|
P6 |
P3 |
|
|
|
|
Рис. 10.1 Схема двигателя |
|
|
|
Схема двигателя аналогична схеме, приведенной в описании лабораторной работы № 9. На стенде схема двигателя собрана.
К обмотке якоря синхронного генератора подводится пониженное напряжение от индуктивного регулятора (ИР), Для этого ИР устанавливается в положение минимального напряжения. Обмотка возбуждения замыкается накоротко выключателем S2.
Синхронный генератор приводится во вращение с частотой, близкой к синхронной, при помощи двигателя постоянного тока. Пуск двигателя осуществляется выключателем S3. Перед включением необходимо убедиться, что сопротивление регулировочного реостата равно нулю. Пусковой реостат установлен в положение «СТОП». Включаем S3 и медленно (за 2-4 с) поворачиваем ручку реостата из положения «СТОП» с положение «ХОД». При этом происходит пуск двигателя.
Частота вращения двигателя отсчитывается по прибору «n» и регулируется плавным изменением сопротивления регулировочного реостата Rр.
Прежде чем проводить опыт скольжения, необходимо убедиться, что направление вращения ротора совпадает с направлением вращения магнитного поля, созданного током в обмотке якоря. Для этого при отключенном двигателе постоянного тока и замкнутом выключателе S2 подать напряжение к обмотке якоря, замыкая выключатель SI.
При достаточной величине напряжения, которое регулируется ИР, синхронный генератор придет во вращение как асинхронный двигатель. Заметить направление вращения ротора. Отключись генератор от сети.
111
Кратковременно пустить в ход двигатель постоянного тока и тоже заметить направление вращения. Для проведения опыта скольжения необходимо, чтобы вращение ротора от приводного двигателя и от асинхронного момента совпадали. В противном случае нужно изменить порядок чередования фаз обмотки якоря синхронной машины (две фазы поменять местами) и для полной уверенности опыт повторить еще раз.
Убедившись в одинаковом направлении вращения поля якоря и ротора, провести опыт скольжения. Для этого привести ротор генератора во вращение (пуская в ход двигатель постоянного тока). К обмотке якоря генератора подвести напряжение такой величины, чтобы максимальное значение тока в обмотке якоря было бы не больше номинального, а стрелки вольтметра V1 и амперметра А1 колебались с минимальной частотой. Частота вращения регулируется плавным изменением тока в обмотке возбуждения двигателя постоянного тока. Если в процессе опыта колебание стрелок приборов V1 и А1 прекращается, то это указывает на втягивание ротора в синхронизм под влиянием реактивного момента (момента явнополюсности). В этом случае следует понизить подводимое к обмотке якоря напряжение до тех пор, пока стрелки приборов не начнут периодически колебаться.
Убедившись в соблюдении всех требований, разомкнуть выключатель S2 и наблюдать показания приборов V1 и А1. Записать крайние одновременные показания стрелок приборов
Umax, Umin, Imin, Imax, в табл. 10.1.
Таблица 10.1
Umax, В |
Imin, А |
xd, Ом |
Umin, В |
Imax, А |
xq, Ом |
|
|
|
|
|
|
|
|
|
|
|
|
Примечание: K xd  xq
xq
Внимание! Опыт скольжения выполняется при разомкнутой обмотке возбуждения, но каждый раз после окончания опыта необходимо замкнуть выключатель S2 во
112
избежание повреждения обмотки возбуждения высоким напряжением.
Наибольшему отклонению стрелки вольтметра V1 соответствует наименьшее отклонение стрелки амперметра А1, и наоборот. Объясняется это следующим. Когда ось полюсов ротора (d) совпадает с осью поля, магнитное сопротивление потоку будет минимальным, а индуктивное сопротивление обмотки якоря
максимальным и равным |
|
|
|
|
|
x |
d |
|
Uф max |
, Ом |
(10.2) |
|
|||||
|
|
Iф min |
|
||
Когда ось междуполюсного пространства (q) совпадает с осью поля якоря, магнитное сопротивление потоку будет максимальным, а индуктивное сопротивление обмотки якоря минимальным и равным
x |
Uф min |
, Ом |
(10.3) |
|
|||
q |
Iф max |
|
|
где Uф, Iф фазовые значения величин.
При вычислении xd, xq активным сопротивлением обмотки якоря пренебречь ввиду того, xd r.
Вследствие инерции стрелок (подвижной части) электроизмерительных приборов величины xd и xq вычисляются с заметными ошибками. Поэтому из опыта обычно находится отношение
K |
x |
Uф max |
|
Iф max |
|
|
|
d |
|
|
|
|
, |
(10.4) |
|
|
Uф min |
Iф min |
|||||
|
xq |
|
|
|
|||
Более точные результаты могут быть вычислены при осциллографировании тока и напряжения.
Определение синхронных индуктивных сопротивлений xd и xq по характеристикам холостого хода (х.х.х.) и короткого замыкания (х.к.з.) рассмотрено в п.3.5.
113
3. Определить индуктивное сопротивление обратной последовательности.
Для опыта используется схема, приведенная на рис.10.1. Обмотка возбуждения замкнута накоротко, а ротор вращается в направлении, противоположном вращению магнитного поля якоря. Для этого после опыта скольжения необходимо поменять местами два любых провода, присоединенных к зажимам обмотки якоря. Данный опыт называется опытом вращения ротора против поля.
Пустить в ход двигатель постоянного тока. Установить ИР в положение минимального напряжения и включить выключатель S1. Регулировать напряжение так, чтобы ток якоря составлял
0,3 0,4 Iн . Измерить и записать показания V1 и A1. |
|
||||||||
|
Среднее значение индуктивного сопротивления обратной |
||||||||
последовательности равно |
|
|
|
|
|
|
|
||
|
|
x |
Uф |
, Ом |
(10.5) |
||||
|
|
|
|
||||||
|
|
|
2 |
Iф |
|
|
|||
или |
x |
* |
x |
|
Iн |
, о.е. |
(10.6) |
||
2 |
2 Uн |
||||||||
|
|
|
|
|
|||||
Результаты измерений и расчетов занести в табл.10.2.
|
|
|
|
|
Таблица 10.2 |
U, В |
I, А |
x , Ом |
x* |
, Ом |
Uн = , В; Iн = , А; |
|
|
2 |
2 |
|
|
|
|
|
|
|
nн = , об/мин |
|
|
|
|
|
|
Осциллографируя кривые |
U t |
и i t , можно определить |
|||
мгновенные значения x2, которые изменяются от максимума до минимума в зависимости от взаимного расположения осей полюсов ротора и вращающегося поля якоря.
Обычно x2 xd и x2 xq . Объясняется это тем, что токи,
индуктируемые в обмотке возбуждения, массиве ротора и демпферной обмотке (если она есть), создают свои МДС, которые
114

препятствуют проникновению поля якоря в ротор, вследствие чего магнитное сопротивление повышается, а индуктивное сопротивление уменьшается.
При вычислении x2 активным сопротивлением обратной последовательности пренебречь.
Определение x2 по данным опытов холостого хода и короткого замыкания рассмотрено в п.3.5.
4. Определить индуктивное сопротивление нулевой последовательности.
Для опыта используется схема, приведенная на рис.10.1, но обмотка якоря соединяется по схеме, приведенной на рис.10.2.
|
C1 |
|
|
|
|
|
|
|
|
|
С1 |
|
S1 1 |
ОВГ |
С4 |
|
|
|
|
|
C5 |
C2 |
|
A1 С2 |
ИР |
2 Т |
|
|
|
|||||
|
С6 |
|
|
|
|
|
|
|
|
V1 |
С3 |
|
3 |
|
|
|
|
|
|
|
|
C3 |
|
|
|
|
|
Рис. 10.2. Схема соединения обмотки якоря
Двигатель пускается в ход с номинальной частотой вращения. Устанавливается минимальное напряжение ИР, и включается выключатель S1. Напряжение ИР регулируется так,
чтобы I 0,5Iн . Индуктивное сопротивление нулевой
последовательности (без учета активного сопротивления нулевой последовательности) вычисляется по формуле
|
x |
U |
|
|
, Ом |
(10.7) |
|||
|
3 I |
||||||||
|
|
0 |
|
|
|
||||
|
* |
|
|
I |
н |
|
|
|
|
или |
x |
x |
|
|
|
|
, о.е. |
(10.8) |
|
|
|
|
|
||||||
|
0 |
|
0 Uн |
|
|
|
|||
Данные опытов и вычислений заносятся в табл.10.3.
115

|
|
|
|
|
Таблица 10.3 |
U, В |
I, А |
x , Ом |
x* |
, Ом |
Uн = , В; Iн = , А; |
|
|
0 |
0 |
|
|
|
|
|
|
|
nн = , об/мин |
|
|
|
|
|
|
Определение x0 по данным опытов холостого хода и короткого замыкания рассмотрено в п.5.
5. Определить xd, о.к.з., xq, x1, x2, x0 из данных опытов холостого хода и короткого замыкания.
Для определения указанных параметров в одних и тех же координатах построить характеристики холостого хода, характеристики трёх-, двух- и однофазного короткого замыкания
(рис. 10.3).
Рис. 10.3. Характеристики холостого хода
Данные для построения этих характеристик были получены при выполнении предыдущей работы (испытание трехфазного синхронного генератора при работе на автономную нагрузку).
5.1. Синхронное индуктивное сопротивление по продольной оси xd.
По рис. 10.3 для тока в обмотке возбуждения iв,
соответствующего по х.х.х. U0 Uн , по х.х.х. ненасыщенного генератора (прямолинейная часть характеристики или её
116

продолжение), находится E0 и по характеристике трехфазного короткого замыкания ток Iк.з.
Синхронное индуктивное сопротивление вычисляется по формуле
|
x |
|
E0 |
|
, Ом |
|
(10.9) |
||||
|
Iк.з |
|
|||||||||
|
|
d |
|
|
|
|
|
||||
|
* |
|
|
Iн |
|
|
|
|
|
||
или |
x |
x |
|
|
|
|
|
, о.е. |
(10.10) |
||
|
|
|
|
|
|||||||
|
d |
|
d Uн |
|
|
||||||
|
5.2. Отношение короткого замыкания (о.к.з.). |
|
|
||||||||
|
Отношением короткого замыкания называется отношение |
||||||||||
установившегося тока трехфазного короткого замыкания Iк.з. |
при |
||||||||||
токе |
возбуждения, который |
при холостом ходе и |
n nн |
даёт |
|||||||
E0 Uн к номинальному току: |
|
|
|
|
|
|
|
|
|
||
|
о.к.з. |
Iк.з. |
, |
(10.11) |
|||||||
|
|
||||||||||
|
|
|
|
|
|
|
Iн |
|
|
||
5.3. Синхронное индуктивное сопротивление по поперечной оси xq.
Величина xq определяется по равенству
xq k xd , |
(10.12) |
где k xd  xq берется из табл.1.
xq берется из табл.1.
5.4. Синхронные индуктивные сопротивления прямой x1, обратной x2 и нулевой последовательности x0.
Определяются по данным рис.10.3.
|
|
x |
x |
|
|
E0 |
, |
Ом; x* x |
Iн |
|
, о.е. |
(10.13) |
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
1 |
|
|
d |
|
|
|
Iкз |
1 |
|
1 |
|
Uн |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
E0 |
|
|
|
|
|
Iн |
, о.е. |
|
||||||||||
x |
|
|
|
|
3E0 |
|
, Ом; x* |
x |
|
(10.14) |
||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
|
2 |
|
|
|
Iк2 |
|
|
|
|
Iк3 |
2 |
|
|
2 |
|
|
Uн |
|
||||||||||
|
|
3 E0 |
|
|
|
|
|
|
|
|
Iн |
, о.е. |
|
|||||||||||||||
x |
|
|
|
|
3E0 |
, Ом; x* |
x |
(10.15) |
||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||
0 |
|
|
|
|
Iк1 |
|
|
|
Iк2 |
|
|
0 |
|
|
0 |
|
Uн |
|
||||||||||
117
Здесь значения E0 , Iк.3 , Iк.2 , Iк.1 взяты при одном токе возбуждения.
Из рассмотренных данных можно определить отношение токов коротких замыканий:
Iк.3 : Iк.2 : Iк.1 |
1: |
I |
к.2 |
: |
Iк.1 |
, |
(10.16) |
|
I |
к.3 |
Iк.3 |
||||||
|
|
|
|
|
Сравнить рассчитанные здесь значения параметров с определенными в предыдущих пунктах.
6. Определить расчетное индуктивное сопротивление рассеяния обмотки якоря по данным опытов xр (xр применяют при построении векторной диаграммы синхронной машины). Его часто называют индуктивным сопротивлением Потье. Значение сопротивления xр близко к значению индуктивного сопротивления рассеяния обмотки якоря x . Величина xр определяется на основании характеристик холостого хода, трехфазного короткого замыкания и индукционной нагрузочной. Данные для построения этих характеристик были получены при выполнении предыдущей лабораторной работы № 11.
В прямоугольной системе координат построить характеристику холостого хода (1 и индукционную нагрузочную
(2) (рис.10.4).
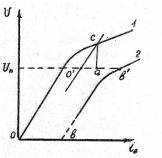
Рис.10.4. Индукционно - нагрузочная характеристика
Начальную (прямолинейную) часть индукционной нагрузочной характеристики продолжить до точки b.
118

На индукционной нагрузочной характеристике взять точку b , соответствующую номинальному напряжению. Влево отложить отрезок o b iв.к . Из точки o провести прямую, параллельную прямолинейной части х.х.х., до пересечения с х.х.х. в точке c . Из точки c опустить перпендикуляр к o b . Величина xр вычисляется по формуле
|
x |
p |
|
ca |
, Ом |
(10.17) |
||
|
|
|
||||||
|
|
|
I |
|
|
|||
|
* |
|
|
|
Iн |
|
|
|
или |
xp |
xp |
|
, о.е. |
(10.18) |
|||
Uн |
||||||||
где ca измеряется в масштабе U в вольтах;
I ток якоря, при котором снималась индукционная нагрузочная характеристика.
7. Построить векторную диаграмму синхронного явнополюсного генератора с учетом насыщения.
На практике с помощью векторной диаграммы часто определяют повышение напряжения синхронного генератора при сбросе нагрузки. Данные для построения векторной диаграммы взять из табл.3, при cos 0,707 предыдущей работы № 11. Для построения использовать наибольший из опыта ток и полученное при этом токе напряжение. Векторная диаграмма строится так (см.рис. 10.5,а):
б)
Рис. 10.5. Векторная диаграмма и характеристика холостого хода
119
По оси ординат отложить вектор напряжения в масштабе
U* 100 |
мм. Нагрузка активно-индуктивная, |
cos 0,707 . |
|
Отложить в произвольном масштабе вектор тока под углом |
|||
45 |
к вектору напряжения, например, I* 50 |
мм. Из конца |
|
вектора |
U* |
отложить jx*pI* . Падением напряжения в активном |
|
сопротивлении пренебречь. Определить величину r*I* и сравнить её с x*pI* . Получить вектор ЭДС E* , созданный результирующим потоком в воздушном зазоре.
Из точки А отложить вектор jx*qI* AF , равный по
величине ЭДС, индуктируемой результирующим магнитным потоком якоря по поперечной оси. Обычно считают, что магнитная цепь по поперечной оси не насыщена, или насыщение учитывается приближенно. Соединить точки О и F прямой, которая определяет
направление вектора |
ЭДС холостого |
хода E* , |
угол |
и |
||
|
|
|
|
0 |
|
|
составляющую тока Id* |
, Iq* . Из точки В опустить перпендикуляр |
|||||
на OF; получаем |
BC jx* |
I* |
и |
OC E* . |
ЭДС |
E* |
|
aq |
q |
|
d |
|
d |
индуктируется в обмотке якоря результирующим магнитным потоком по продольной оси. Из точки А опустить перпендикуляр на OF и из полученной точки К отложить отрезок KM jxd Id , где
Id I sin . Отрезок ОМ соответствует ЭДС E0. Для определения тока возбуждения для выбранных значений I и U построить характеристику холостого хода (табл.1, лабораторная работа № 11) и выполнить построения, показанные на рис. 10.5,б. По результатам построений найти iвн и процентное повышение напряжения при сбросе нагрузки от I до I 0 по формуле
U |
U0 U |
100, % |
(10.19) |
|
|||
|
U |
|
|
120