

19. Приборы для инвазивного измерения давления крови и параметров пульсовой волны.
Одним из важных показателей деятельности сердечно-сосудистой системы является давление в венах и артериях. Наиболее точные измерения этих показателей обеспечиваются инвазивными методами с помощью катетерных датчиков, которые чаще всего вводятся в лучевую артерию. Это обусловлено хорошей её доступностью и возможностью обеспечения коллатерального (обходного) кровотока в конечностях.
В датчиках для инвазивного измерения давления могут использоваться малогабаритные мембраны, упругие деформации которых преобразуются в электрический сигнал с помощью чувствительных элементов.
В качестве таких элементов в датчиках давления крови используют различные типы первичных преобразователей (тензометрические, ёмкостные, пьезоэлектрические, полупроводниковые).
Принцип работы датчика: трансформация величины давления, воздействующей на мембрану, в изменение электрических характеристик датчика (сопротивление, ёмкости, напряжения и др.).
Широкое распространение получили тензометрические датчики, имеющие хорошие метрологические характеристики. Датчик, с помощью которого давление преобразуется в электрический сигнал, может непосредственно вводится в артерию или вену, либо располагаться на другом конце катетера.
Датчик, располагаемый на другом конце катетера
Конец катетера имеет форму шарика с боковым отверстием. На втором конце катетера закреплена деформируемая мембрана. Около неё расположено отверстие, предназначенное для его заполнения физиологическим раствором.
Перед введением в сосуд катетер заполняется физиологическим раствором без воздушных пузырьков. [Газ плохо сжимается. Наличие в катетере пузырьков воздуха приводит к ухудшению качества передачи пульсации давления и их искажениям]. Этот столбик жидкости, колеблясь синхронно с колебаниями кровотока в сосудах, передаёт колебания к мембране, и далее чувствительный элемент преобразует его в электрический сигнал.
При такой схеме построения датчика на динамические характеристики тракта преобразования давления в электрический сигнал влияют: диаметр и длина катетера, плотность и вязкость заполняющей его жидкости, степень эластичности трубок катетера.
Датчик, вводимый в сосуд
При введении датчика в сосуд можно получить значительно лучшие динамические характеристики.
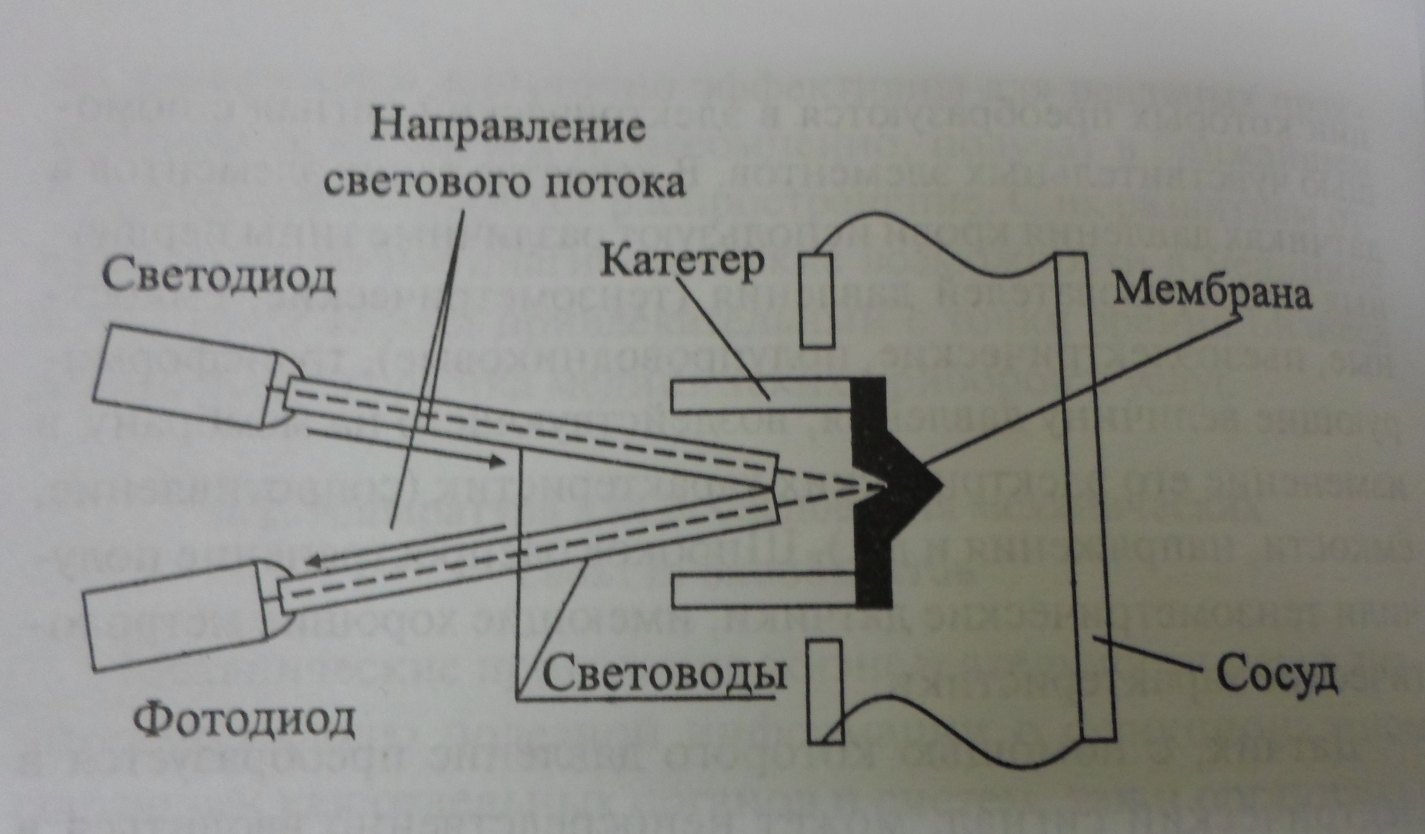
Механические перемещения мембраны модулируют световой поток, который далее преобразуется в электрический сигнал.
В катетере такого датчика располагаются два тонких световода. Пучок света от светодиода через один из световодов попадает на мембрану, расположенную на торце катетера. При деформации мембраны световой поток, попадающий во второй световод и далее на фотодиод, меняются по величине из-за изменения углов падения и отражения. В результате этого электрический сигнал, снимаемый с фотодиода, повторяет колебание мембраны. Введение третьего световода и второго фотодиода позволяют минимизировать погрешность, вызываемую измерением интенсивности свечения светодиода путём вычисления отношений сигналов, получаемых по двум измерительным каналам.
[НЕ помню, было ли это на лекции, поэтому на всякий пожарный]
В некоторых системах используются многоканальные катетеры, позволяющие измерять колебания давления на разных участках сосудистой системы. Рассмотрим структуру инвазивного измерителя давления, использующего тензометрический преобразователь величины деформации мембраны в электрический сигнал. Тензометрический преобразователь использует свойство металлических и полупроводниковых пленок изменять свое электрическое сопротивление при их механических растяжениях

Деформация F воздействует на чувствительные элементы измерительного моста (ИМ), питающегося от источника тока (ИТ). Выходной мостовой сигнал измерительной цепи усиливается усилителем У1, который имеет дифференциальные входы и реализует частотную коррекцию входного сигнала, что позволяет уменьшить погрешности и обеспечить согласование измерительного моста с последующими элементами схемы.
Во втором усилителе У2 осуществляется установка нуля, необходимая при тарировке датчика. Мультиплексор (МС) по сигналу от ПЭВМ (то же самое, что и ПК) или микропроцессора осуществляет цифровую регулировку коэффициента усиления У3, обеспечивая требуемый динамический диапазон работы АЦП. Для снижения динамической погрешности измерений третий усилитель может быть охвачен частотно-зависимой обратной связью.
Мне тоже стало интересно, что такое тарировка =)
Тарировка – это компенсация большей части систематической погрешности всей измерительной системы от входа измеряемой физической величины до выхода измеренного значения этой величины. Тарировка делается путём подачи на датчик эталонной величины физического воздействия (судя по всему, тот резистор сверху У2 для этого и нужен)