Определение вынужденной составляющей движения в системе
Для любого сигнала:
 ,
где
,
где
 .
Тогда
.
Тогда
 .
.
Найдем свободное
движение в системе:
 .
L
–простые корни, r
– комплексно-сопряженные, k
– кратные. Вычет:
.
L
–простые корни, r
– комплексно-сопряженные, k
– кратные. Вычет:
 .
.
Если все корни
уравнения
 простые и
простые и
 .
Тогда использую теорему разложения
получим:
.
Тогда использую теорему разложения
получим:

Если имеются кратные корни, то

Если имеются комплексно-сопряженные корни, то

Обобщая все сказанное получаем общую формулу:


38. Основные показатели качества регулирования системы. Их связь с запасами устойчивости
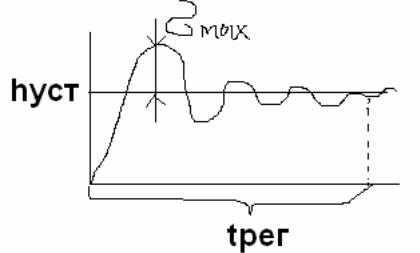
Показателями качества являются:
Время регулирования
 – время, за которое выходной сигнал
перестанет отклоняться более чем на
5% от установившегося значения.
– время, за которое выходной сигнал
перестанет отклоняться более чем на
5% от установившегося значения.Максимальное перерегулирование:
 .
.Число N колебаний за время регулирования.
Собственная частота колебаний
 .
.Логарифмический декремент затухания.
Максимальная скорость.
Возможны следующие
типы переходных процессов: колебательный,
монотонный ( ,
присутсвуют колебания)
и апериодический (
,
отсутствуют колебания).
,
присутсвуют колебания)
и апериодический (
,
отсутствуют колебания).
Для частной задачи может быть введена аналитическая зависимость, связывающая характер переходного процесса и запасов устойчивости:
Апериодический:
 .
.Монотонный:
 .
.Колебательный:

39. Приближенная оценка показателей качества по доминирующим полюсам передаточной функции системы
Пусть доминирующими
полюсами являются
 и
и
 ,
причем
,
причем
 .
Тогда на координатной плоскости
отмечаются эти полюса, а также полюса
(крестиками) и нули (ноликами) данной
функции.
.
Тогда на координатной плоскости
отмечаются эти полюса, а также полюса
(крестиками) и нули (ноликами) данной
функции.
Время регулирования оценивается следующим образом:

Если
 ,
то используют следующую формулу:
,
то используют следующую формулу:

Максимальное перерегулирования оценивается по формуле:

Здесь
 – углы векторов, проведенные из полюсов
системы (комплексно-сопряженная точка
и точка покоя уже учтены в формуле) к
,
– углы векторов, проведенные из полюсов
системы (комплексно-сопряженная точка
и точка покоя уже учтены в формуле) к
,
 – углы векторов, проведенные из нулей
к
.
– углы векторов, проведенные из нулей
к
.
При расположении
полюсов под углом
 скорость установления системы будет
максимальной, т.е. время регулирования
будет минимальным.
скорость установления системы будет
максимальной, т.е. время регулирования
будет минимальным.
 Наибольшее
влияние на переходный процесс оказывают
полюса, находящиеся ближе к мнимой оси.
Удаленные полюса мало влияют на переходный
процесс, а на качество вообще не влияют
можно
пренебрегать этими составляющими
движения.
Наибольшее
влияние на переходный процесс оказывают
полюса, находящиеся ближе к мнимой оси.
Удаленные полюса мало влияют на переходный
процесс, а на качество вообще не влияют
можно
пренебрегать этими составляющими
движения.
Вычеты в ближних полюсах больше - полюса доминируют (доминировать могут как действительные, так и комплексные полюса).
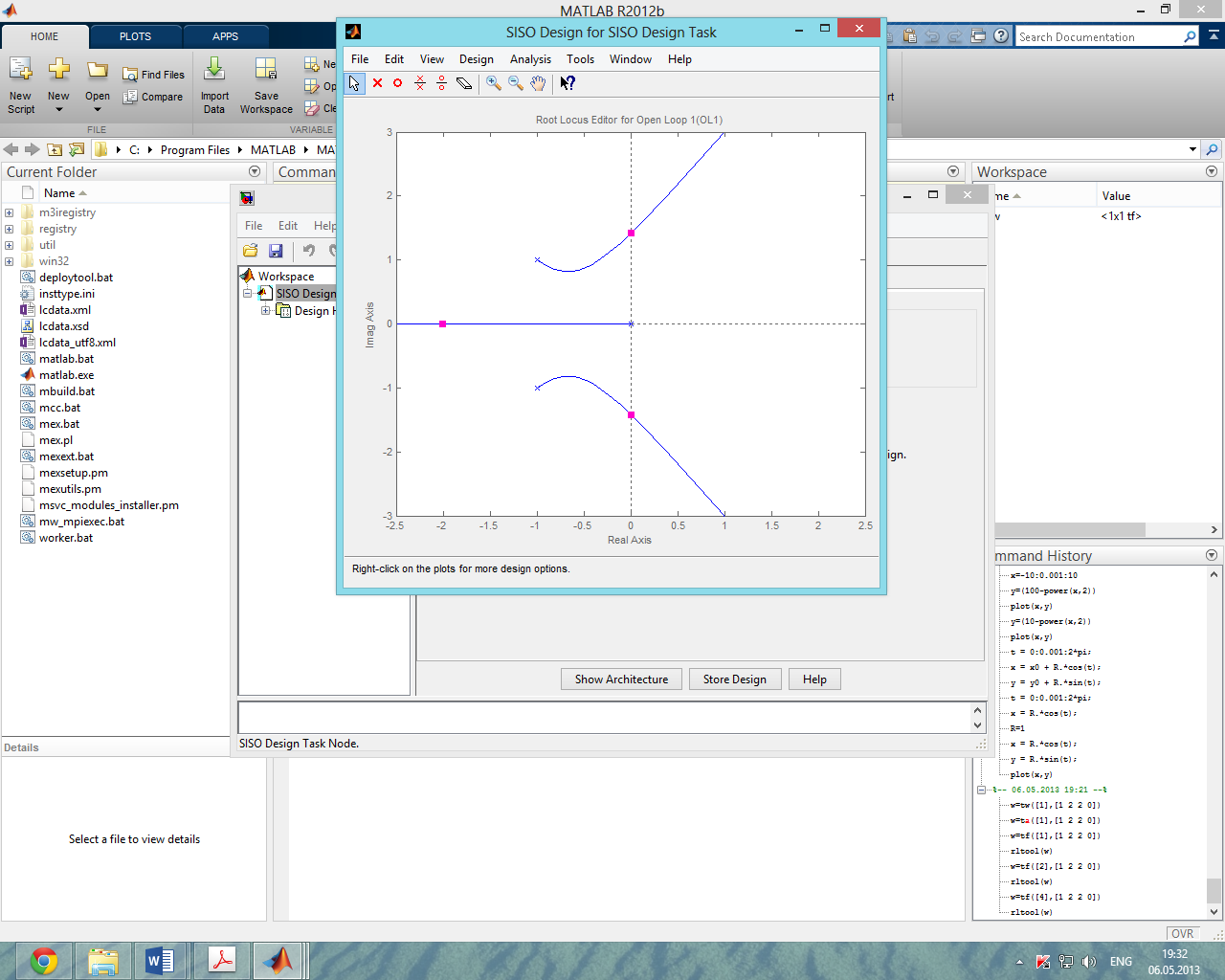
40. Анализ и проектирование систем с помощью метода корневого годографа

В данной системе истинный коэффициент
усиления
 ,
кроме того система имеет два полюса:
,
кроме того система имеет два полюса:
 .
.
Согласно правилам построения траекторий корней годографа:
Имеется три ветви корневого годографа, картина будет симметричной, траектории непрерывные.
Ветви начинаются в полюсах.
При
 :
:
 .
.При
 :
:
 ,
,
 ,
при
,
при
 :
:
 .
.Точка пересечения:
 .
.
Полюс находится на действительной оси, значит корень в нуле движется к
 .
.Углы выхода корневого годографа из мнимых полюсов:
 .
.Пересечений с действительной осью нет.
 :
:

Откуда получаем корни:
 .
.
При
 Система будет неустойчивой. При
Система будет неустойчивой. При
 третий корень на вещественной оси будет
находиться в точке
третий корень на вещественной оси будет
находиться в точке
 .
.