

lab_3_tau
.docxМинистерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра промышленной электроники (ПрЭ)
Лабораторная работа
«Параллельная коррекция систем автоматического управления»
По дисциплине
«Теория автоматического управления»
Вариант №20
Студенты гр.368-1
____Никифоров В.В.
____Жанаева С.Б.
Принял
Доцент каф. ПрЭ
_____Лебедев Ю.М.
«__» _______2021 г.
Томск 2021
ЦЕЛЬ РАБОТЫ
Целью лабораторной работы является исследование характеристик САУ с местными жёсткими и гибкими обратными связями.
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК САУ С ПОЛОЖИТЕЛЬНОЙ ЖЕСТКОЙ ОБРАТНОЙ СВЯЗЬЮ
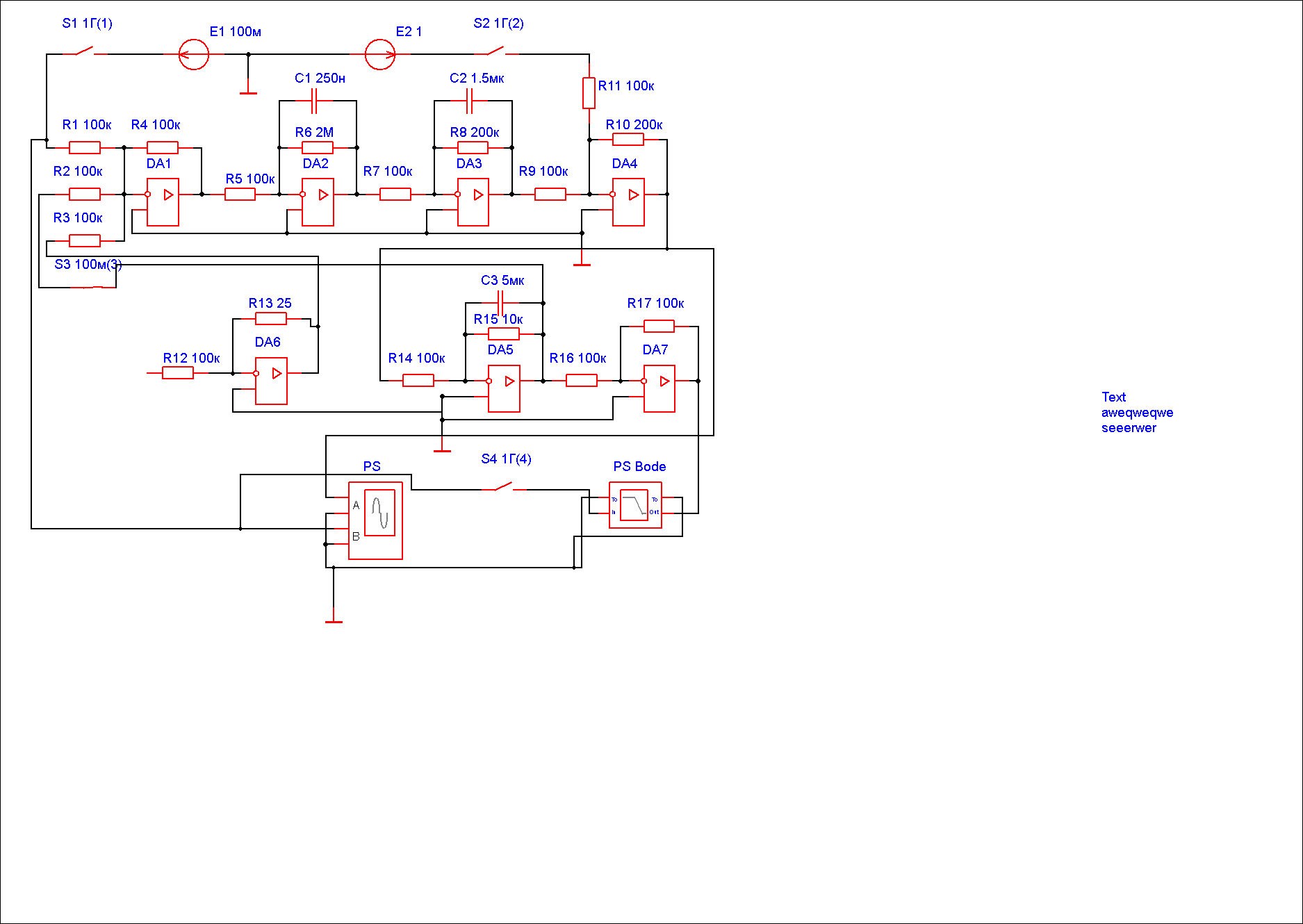
Рисунок 1 – Схема системы с положительной жёсткой обратной связью нескорректированной
1) Для заданного варианта исходных данных рассчитать параметры элементов системы.
Вариант |
T1, c |
T2, c |
Toc, c |
k1 |
k2 |
k3 |
koc |
Кк,з |
20 |
0,5 |
0,3 |
0,05 |
20 |
2 |
2 |
0,1 |
0,025 |

2) Cнять переходные характеристики по задающему и возмущающему воздействиям, измерив при этом установившиеся значения выходного напряжения, время переходного процесса и перерегулирование по задающему воздействиям. Cнять частотные характеристики нескорректированной САУ и определить запасы устойчивости по амплитуде G и фазе .
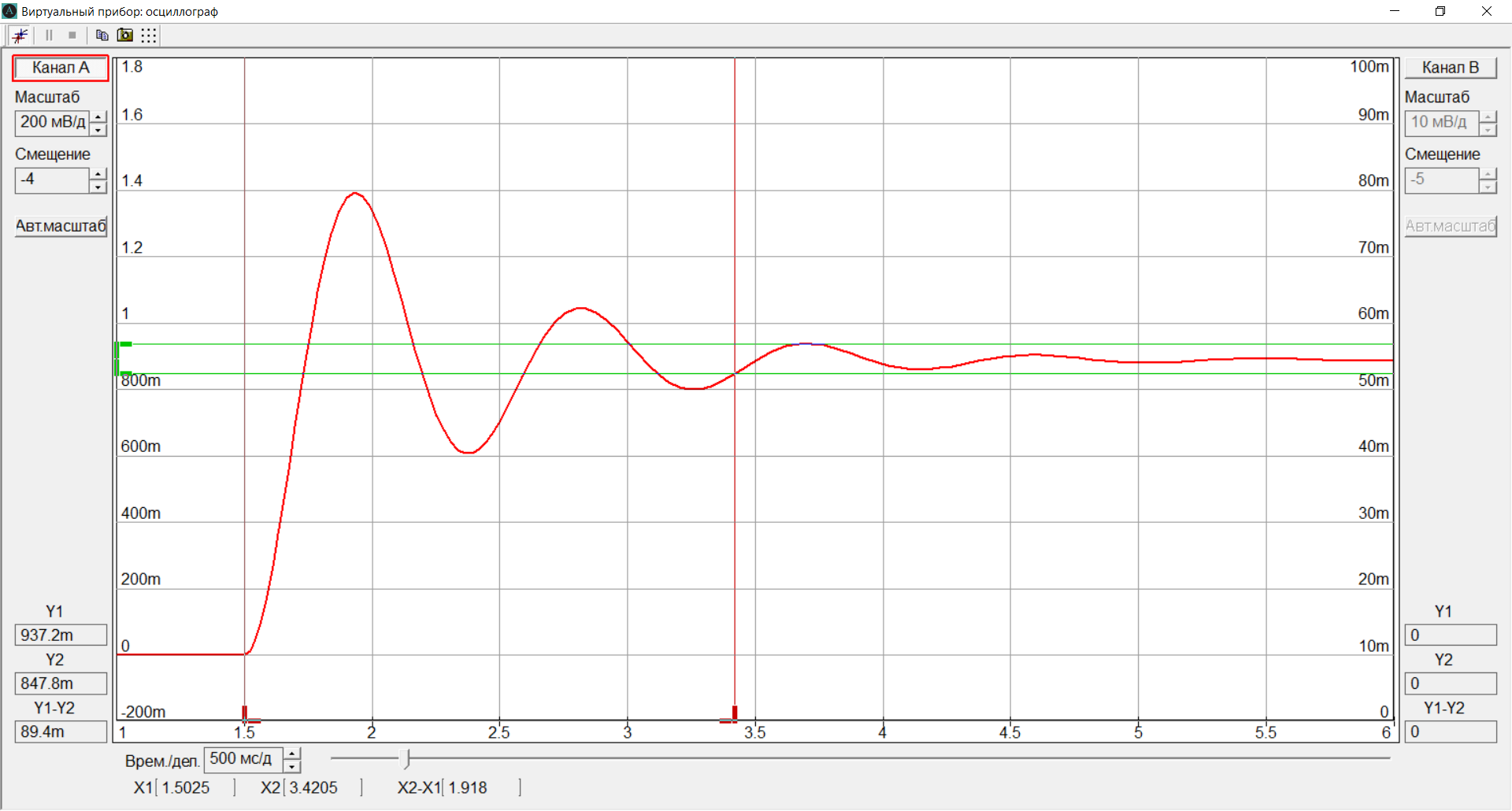
Рисунок 2 – Расчет переходных характеристик по задающему воздействию

Рисунок 3 – Расчет переходных характеристик по возмущающему воздействию
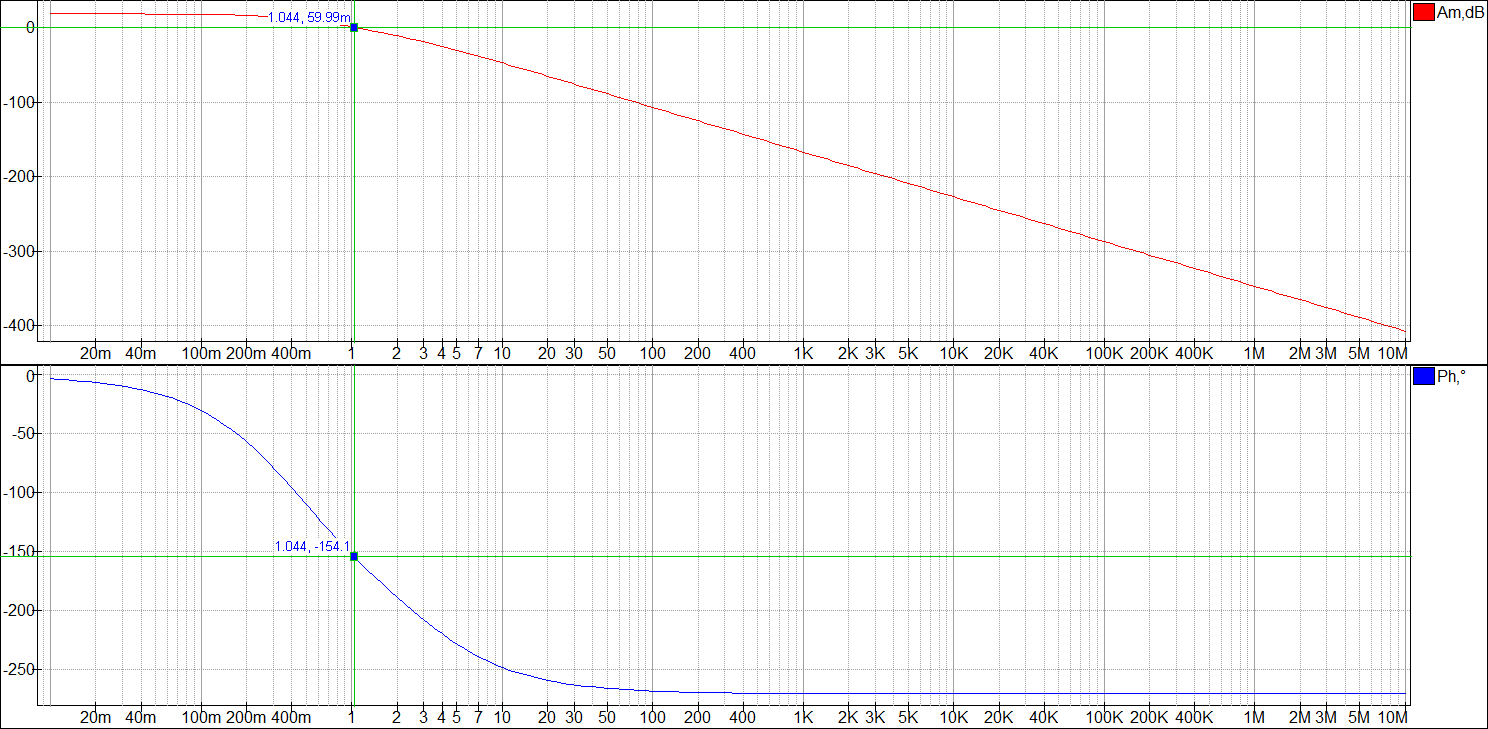
Рисунок 3 – Расчет частотных характеристик нескорректированной САУ
По задающему воздействию:
№ |
|
|
|
|
|
|
|
|
|
некор |
2,269 |
0,890 |
1,394 |
56,629 |
1,044 |
6,56 |
-154,1 |
25,9 |
8,256 |
0,1 |
2,284 |
0,899 |
1,406 |
56,396 |
1,044 |
6,56 |
-154,7 |
25,3 |
6,56 |
0,5 |
2,296 |
0,942 |
1,464 |
55,414 |
1,012 |
6,359 |
-155,2 |
24,8 |
6,359 |
1 |
2,019 |
1 |
1,548 |
54,8 |
0,996 |
6,258 |
-157 |
23 |
6,258 |
1,5 |
2,096 |
1,071 |
1,643 |
53,408 |
0,967 |
6,076 |
-158 |
22 |
6,076 |
2 |
2,165 |
1,146 |
1,754 |
53,054 |
0,923 |
5,799 |
-158,7 |
21,3 |
5,799 |









По возмущающему воздействию:
№ |
|
|
|
|
некор |
0,670 |
-1,113 |
266,119 |
2,824 |
0,1 |
0,7 |
-1,104 |
257,714 |
2,855 |
0,5 |
0,826 |
-1,106 |
233,898 |
2,882 |
1 |
1 |
-1 |
200 |
2,543 |
1,5 |
1,2 |
-0,933 |
177,75 |
2,608 |
2 |
1,428 |
-0,858 |
160,084 |
2,662 |


3) По полученным результатам построить внешние статические характеристики САУ для всех принятых значений Kк, а также графики зависимостей.
Рисунок
4 – Зависимость

Рисунок
5 – Зависимость

Рисунок
6 – Зависимость

Рисунок
7 – Зависимость

Рисунок
8 – Зависимость

Рисунок
9 – Зависимость

Рисунок
10 – Зависимость

По задающему воздействию:
Пока значения коэффициенты передачи не превышают заданного значения, время переходного процесса возрастает, а перерегулирование возрастает по закону:

, то есть максимум выходного напряжения уменьшается.
Когда коэффициент передачи равен заданному значению, время переходного процесса уменьшается, а максимум выходного напряжения увеличивается, следовательно, увеличивается и перерегулирование.
Однако, когда идет превышение коэффициента передачи время переходного процесса снова возрастает, а максимум выходного напряжения увеличивается, при этом установившееся выходное напряжение увеличивается при любом увеличении коэффициента передачи, причем оно растет быстрее максимального, следовательно, перерегулирование снова начинает уменьшаться.
Запас устойчивости по фазе уменьшается при любом увеличении коэффициента передачи, но запас устойчивости по амплитуде остается примерно одинаковым.
По возмущающему воздействию:
Пока значения коэффициента передачи не превышают заданного значения, время переходного процесса практически не меняется, когда коэффициент передачи превышает заданного значения, время переходного процесса начинает уменьшаться.
Перерегулирование при любом коэффициенте передачи уменьшается ( в том числе и при некорректируемой САУ).
Также
видно, что все внешние характеристики
исходят из различных точек, причём при
 имеет место недокомпенсация статической
ошибки САУ, при
имеет место недокомпенсация статической
ошибки САУ, при
 – её полная компенсация, а при
– её полная компенсация, а при
 перекомпенсация
статической ошибки.
перекомпенсация
статической ошибки.
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК САУ С ОТРИЦАТЕЛЬНОЙ ГИБКОЙ ОБРАТНОЙ СВЯЗЬЮ
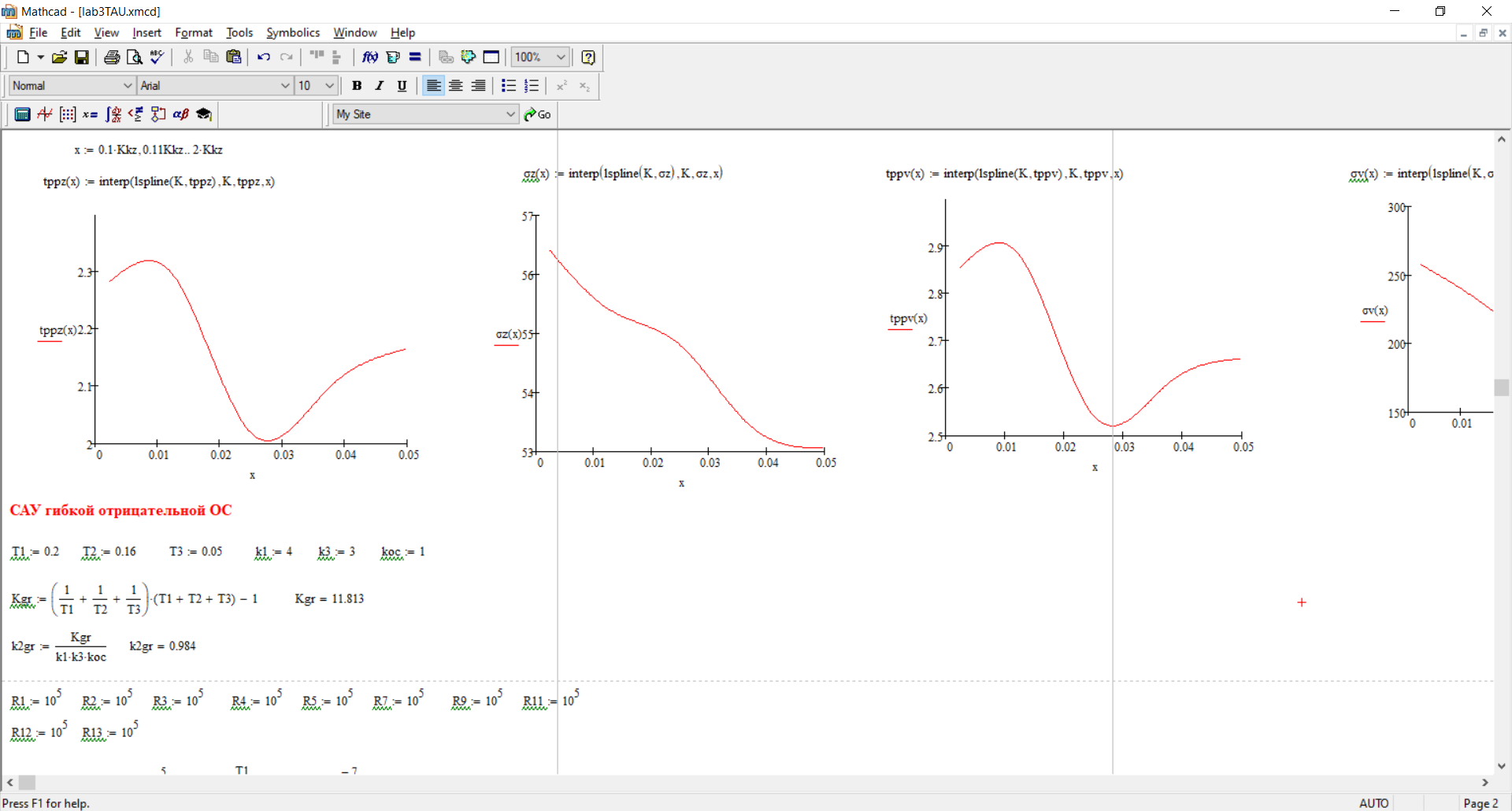
1) По данным рассчитать параметры элементов модели САУ, рассчитать граничный коэффициент передачи нескорректированной САУ и граничное значение коэффициента передачи, определить значения параметров. В точке 1 разомкнуть местную обратную связь, замкнуть ключ S1 и пронаблюдать переходную характеристику нескорректированной САУ. Убедиться, что она имеет вид незатухающих колебаний, амплитуда которых не превышает 2 В.
Вариант |
T1, c |
T2, c |
T3, c |
k1 |
k3 |
koc |
20 |
0,2 |
0,16 |
0,05 |
4 |
3 |
1 |

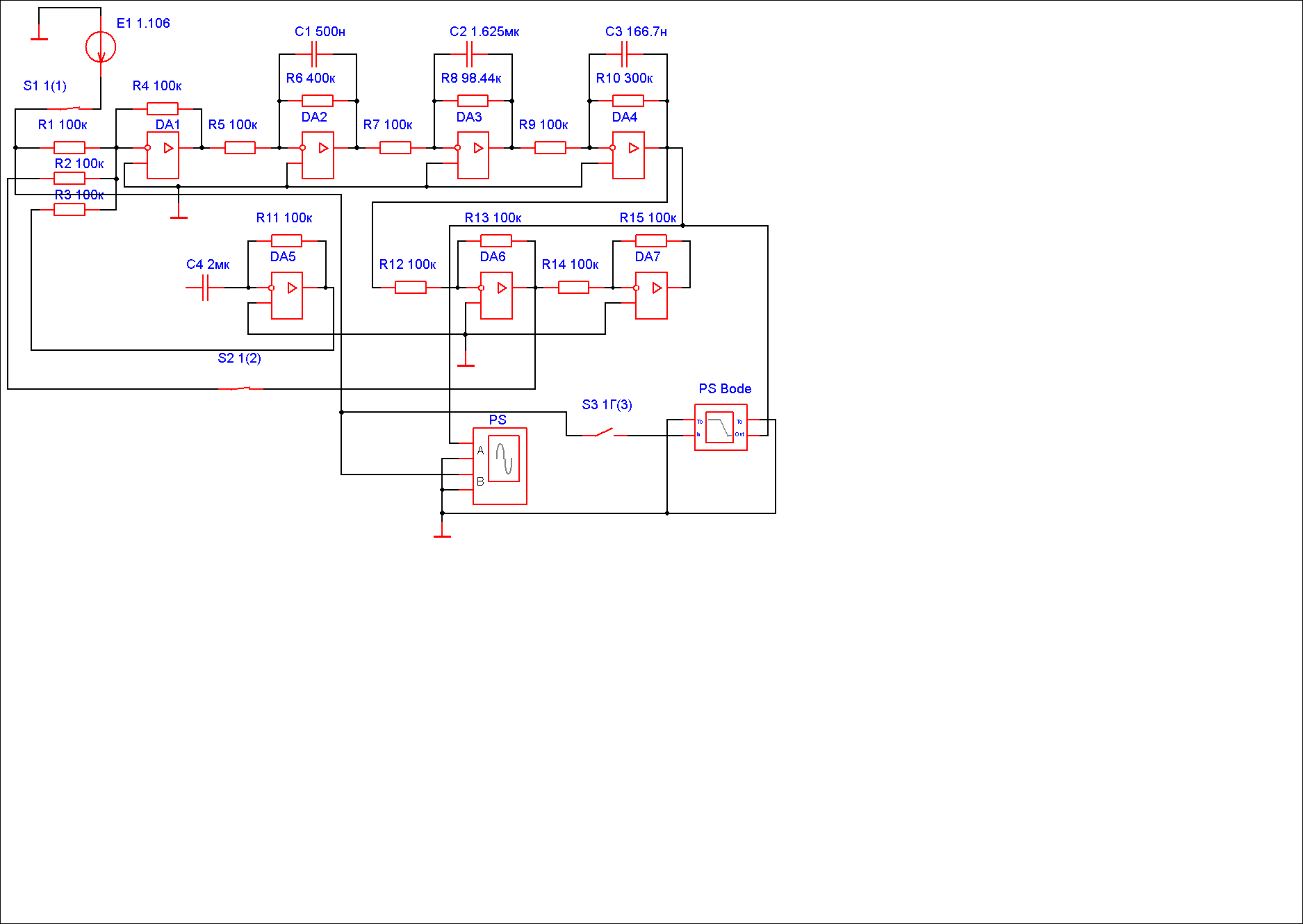
Рисунок 10 – Схема нескорректированной САУ

Рисунок 11 – Проверка правильной работы нескорректированной САУ
2)
Принять значение ,
пересчитать значение коэффициента
передачи
,
пересчитать значение коэффициента
передачи ,
уточнить параметры R8, C2 и при разомкнутой
местной обратной связи снять переходную
характеристику по задающему воздействию
и частотные характеристики САУ, определив
при этом время переходного процесса,
перерегулирование по задающему
воздействию, а также запасы устойчивости
по амплитуде G
и фазе
.
,
уточнить параметры R8, C2 и при разомкнутой
местной обратной связи снять переходную
характеристику по задающему воздействию
и частотные характеристики САУ, определив
при этом время переходного процесса,
перерегулирование по задающему
воздействию, а также запасы устойчивости
по амплитуде G
и фазе
.
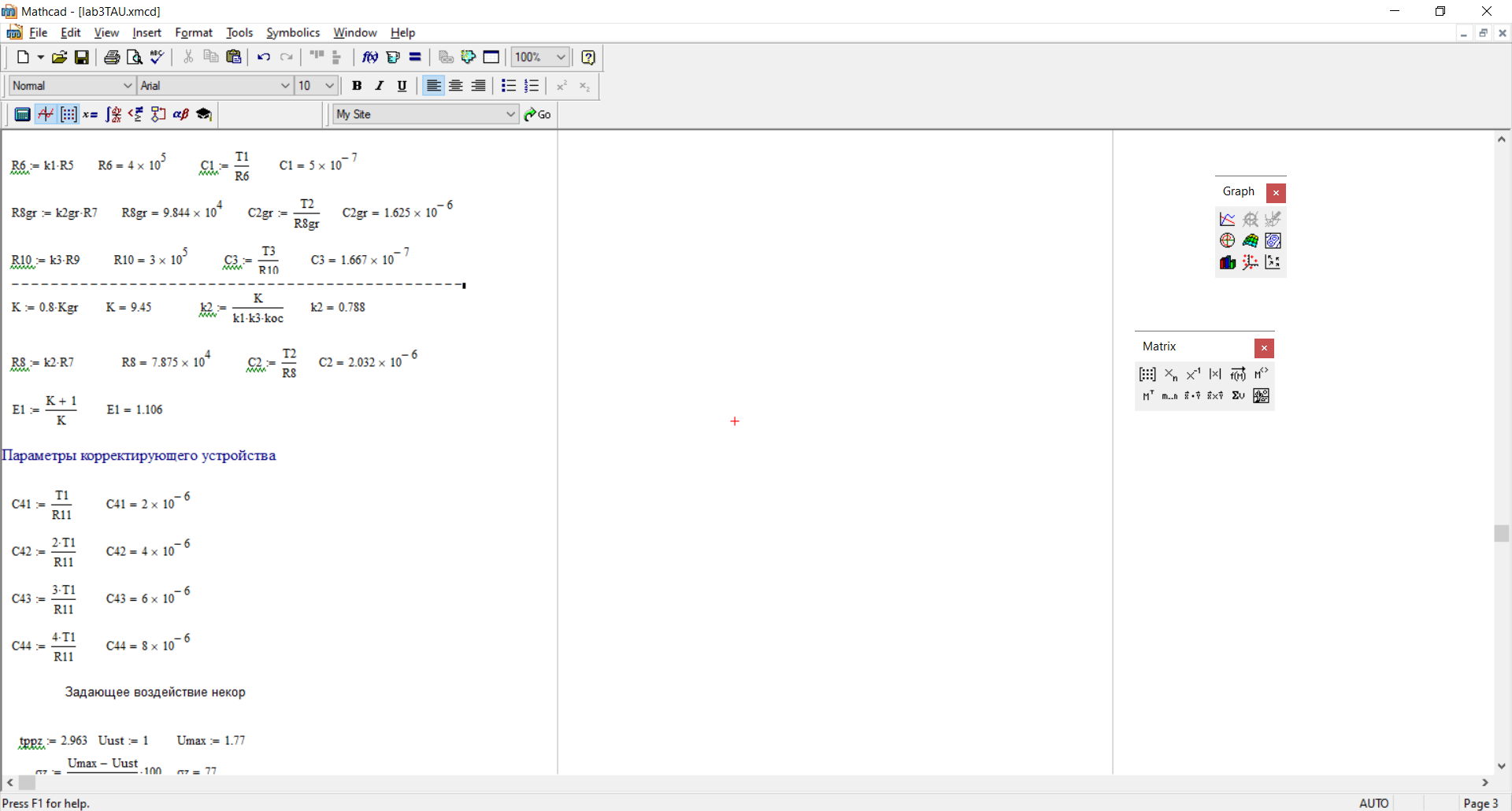
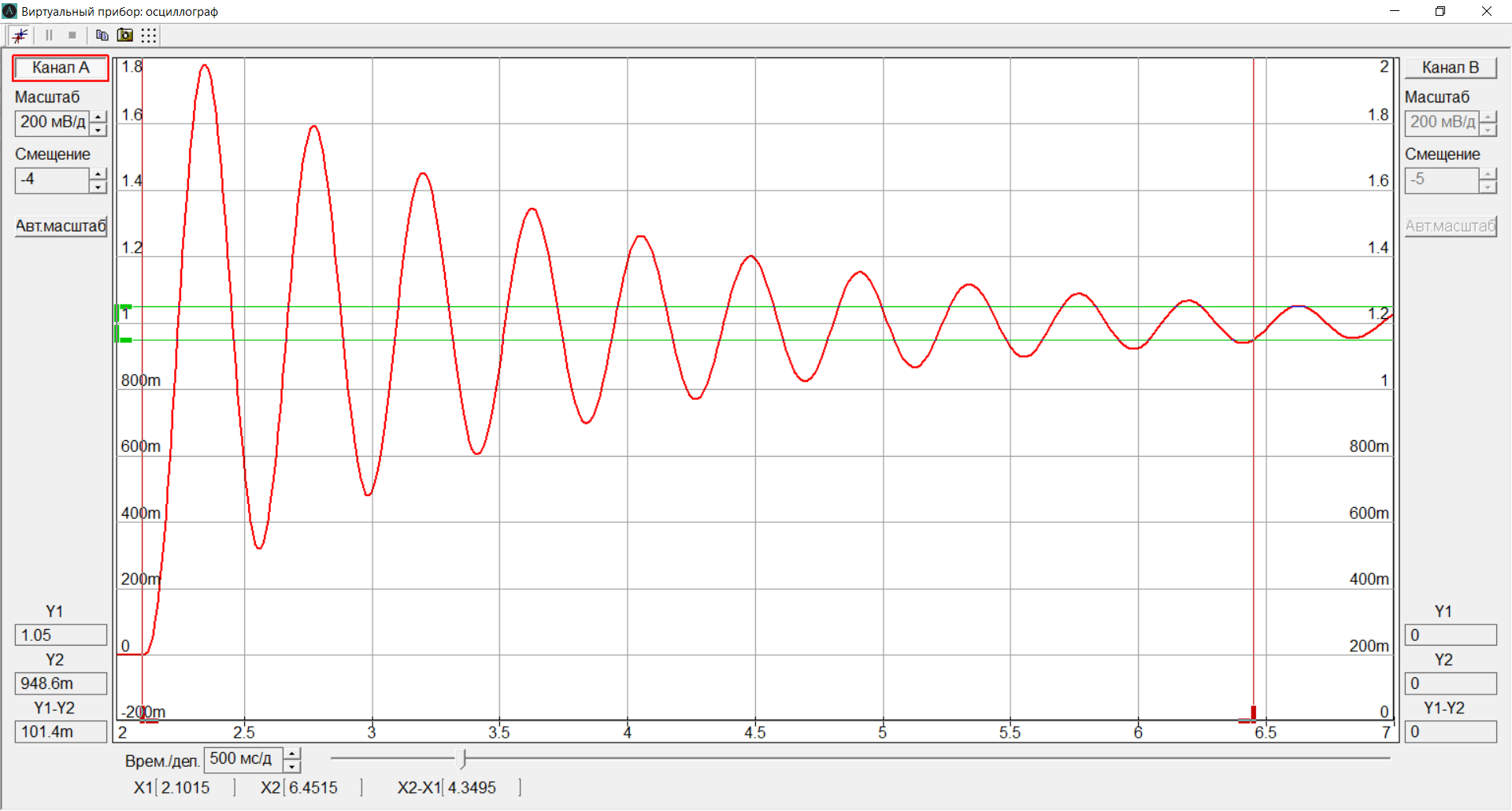
Рисунок 12 – Переходный процесс нескорректированной САУ при
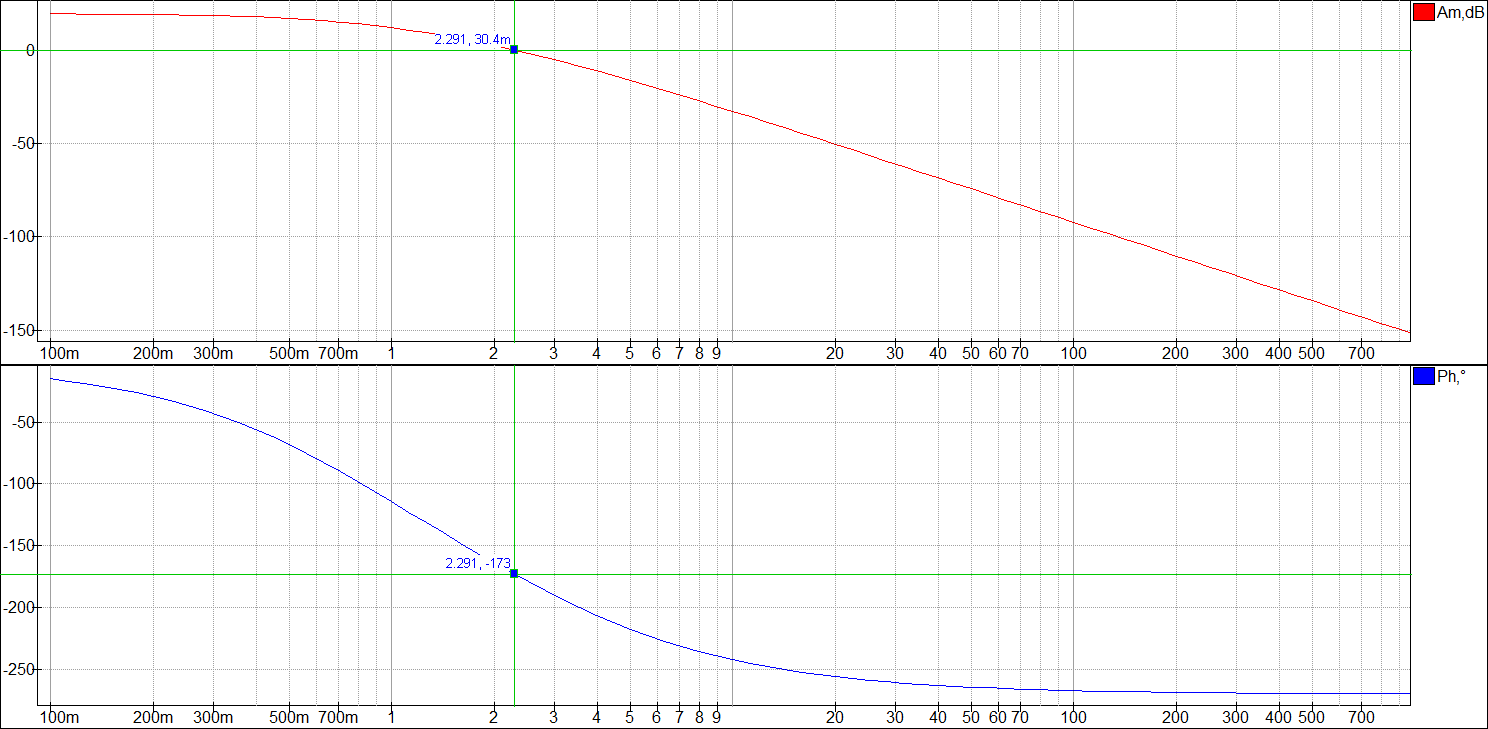
Рисунок 13 – Частотные характеристики нескорректированной САУ при
3)
Замкнуть местную гибкую связь, принять
значение
 ,
рассчитать ёмкость конденсатора С4,
снять переходную характеристику по
задающему воздействию и частотные
характеристики САУ, определив при этом
время переходного процесса, перерегулирование
по задающему воздействию, а также запасы
устойчивости по амплитуде G
и фазе .
,
рассчитать ёмкость конденсатора С4,
снять переходную характеристику по
задающему воздействию и частотные
характеристики САУ, определив при этом
время переходного процесса, перерегулирование
по задающему воздействию, а также запасы
устойчивости по амплитуде G
и фазе .
4)
Повторить задание 3 при
 ,
,
 ,
,
 .
.
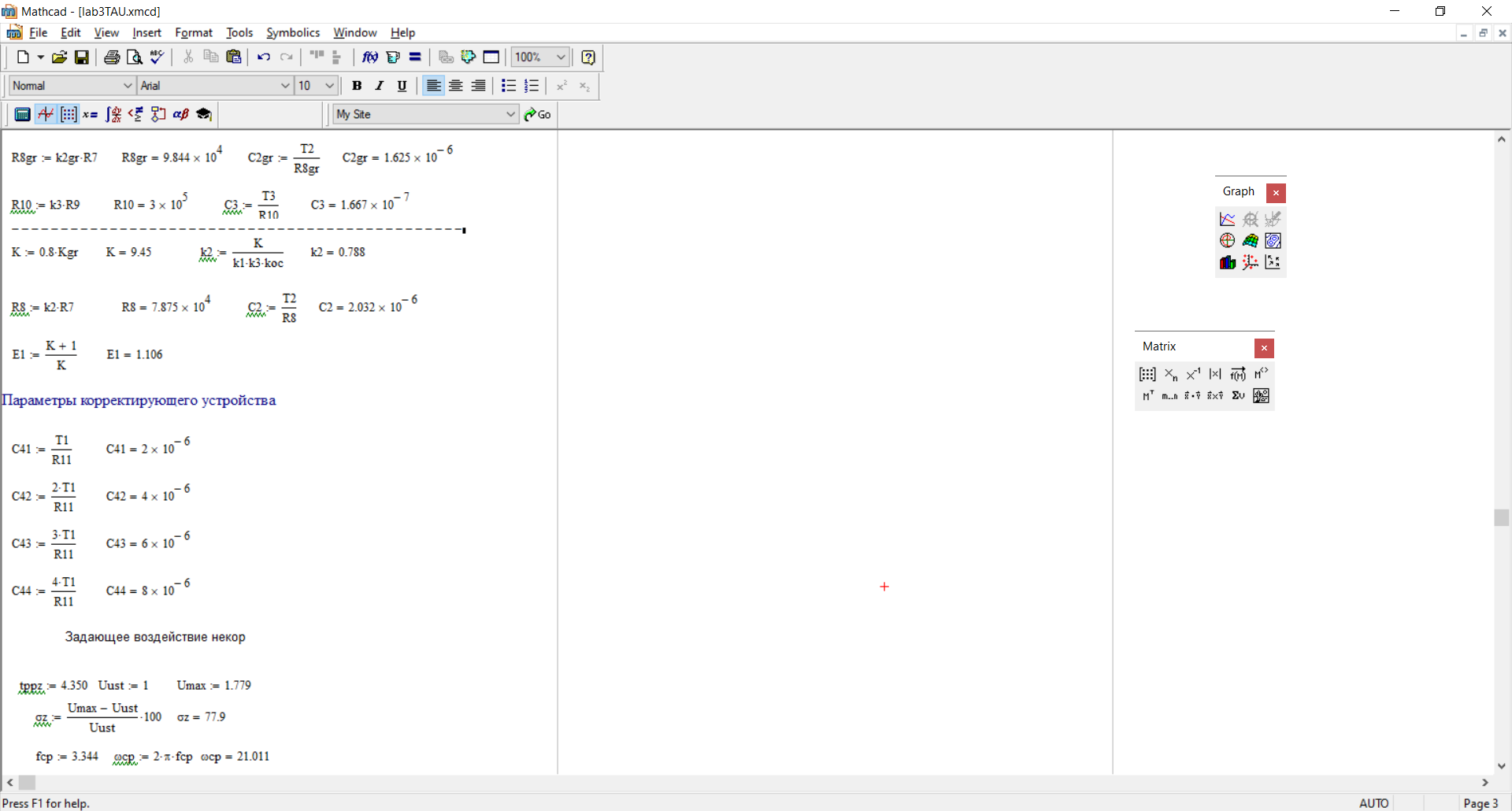
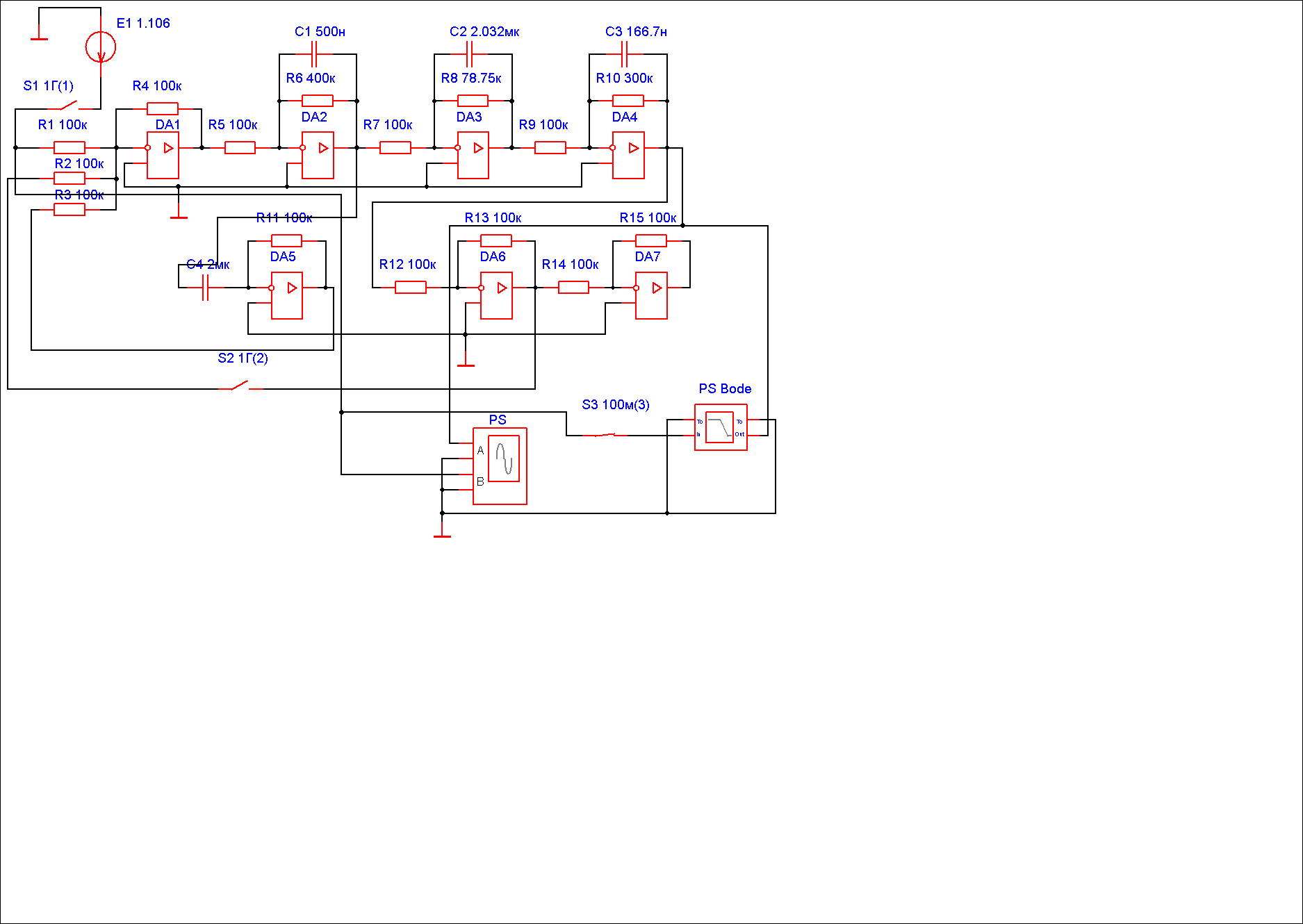
Рисунок 14 – Схема корректируемой САУ

Рисунок 15 - Переходный процесс корректируемой САУ при

Рисунок 16 - Частотные характеристики корректируемой САУ
№ |
|
|
|
|
|
|
|
|
|
некор |
4,350 |
1 |
1,779 |
77,9 |
3,344 |
21,011 |
-173 |
7 |
1,964 |
С4 |
1,464 |
1 |
1,391 |
39,1 |
0,999 |
6,277 |
-143,5 |
36,5 |
10,62 |
2 С4 |
1,344 |
1 |
1,225 |
22,5 |
0,670 |
4,21 |
-128,3 |
51,7 |
14,97 |
3 С4 |
1,152 |
1 |
1,133 |
13,3 |
0,505 |
3,173 |
-119 |
61 |
17,92 |
4 С4 |
1,248 |
1 |
1,074 |
7,4 |
0,404 |
2,538 |
-112,5 |
67,5 |
20,02 |
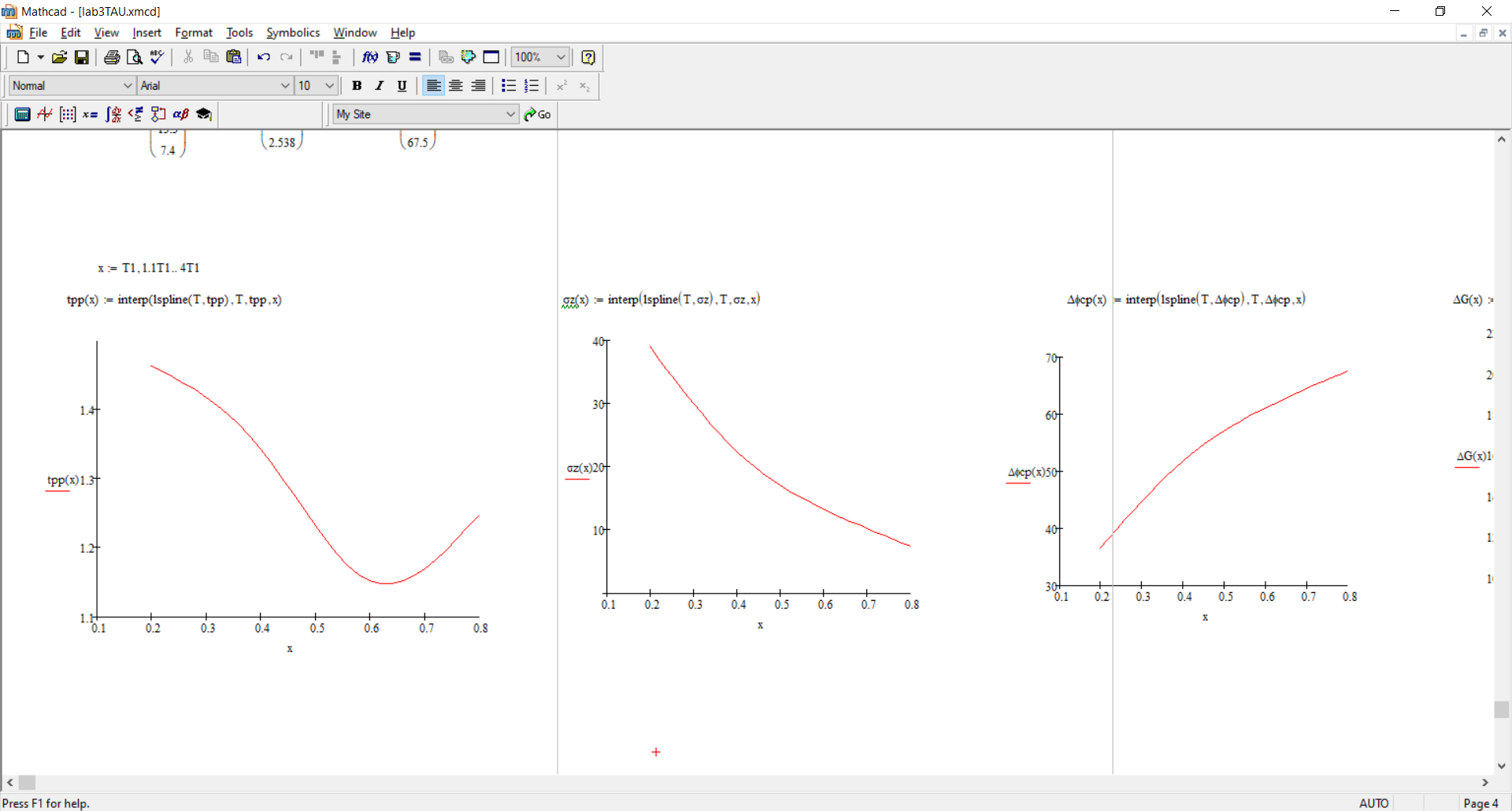
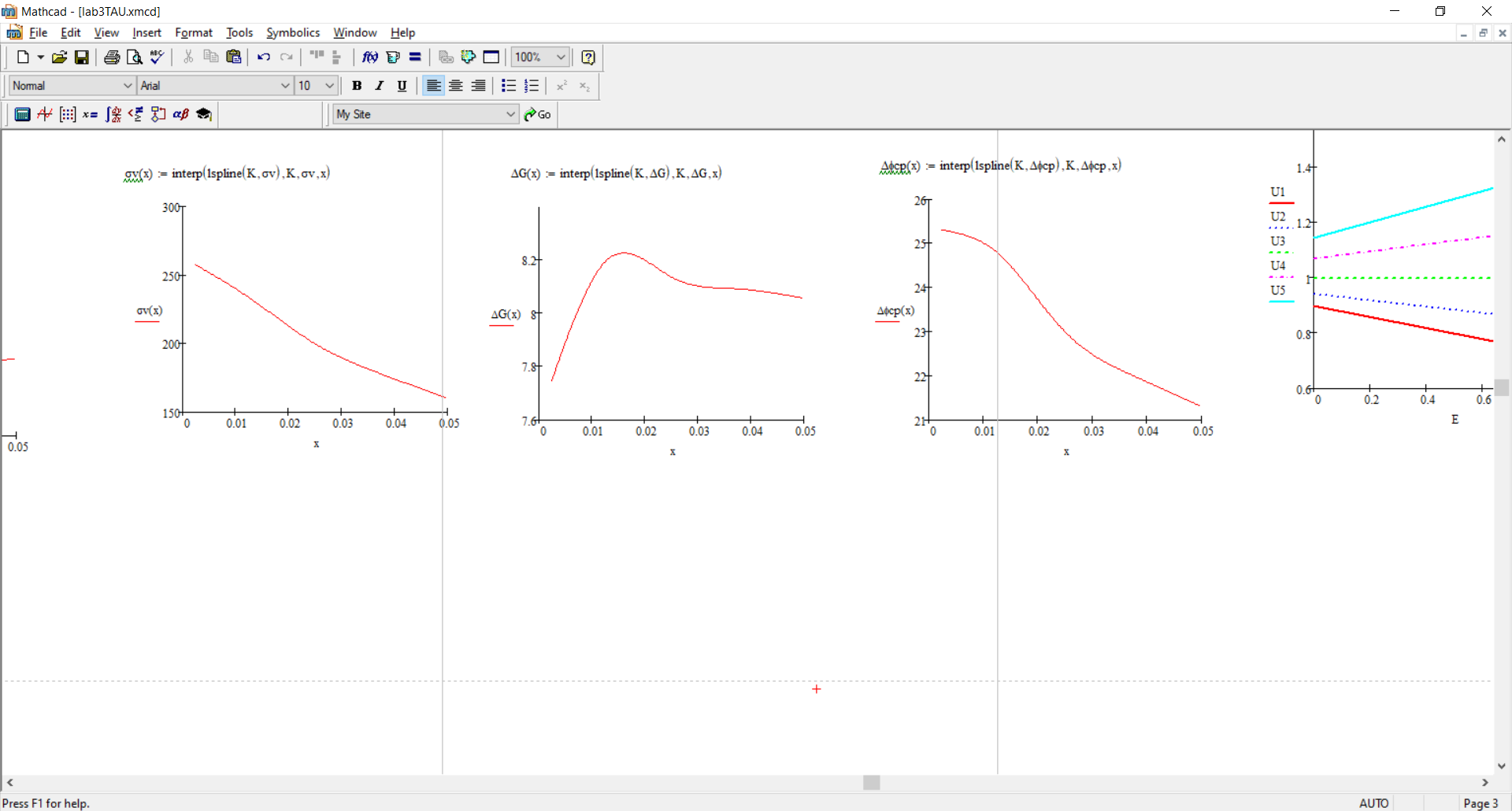
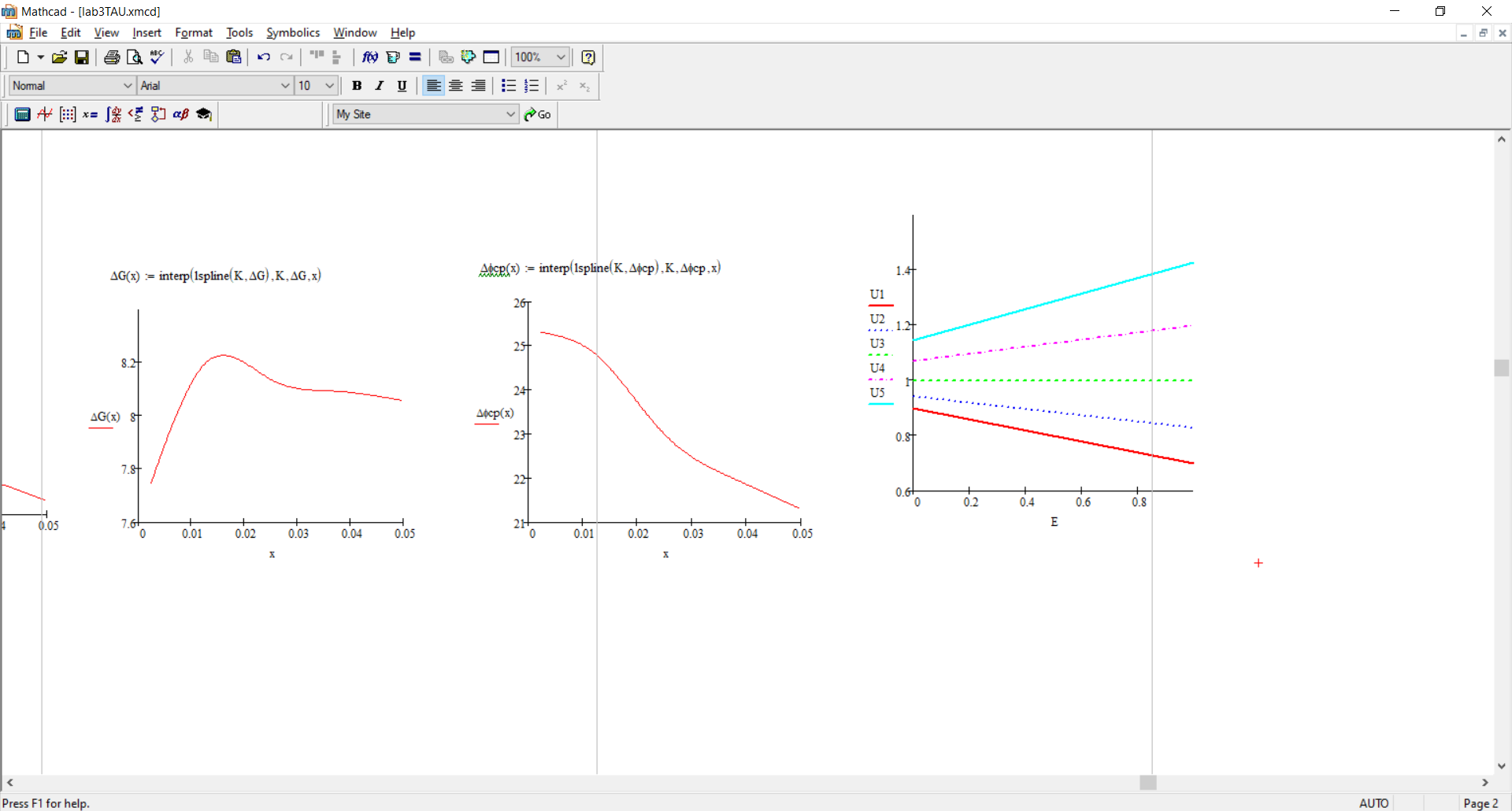
Рисунок 17 – Зависимость
Рисунок
18 – Зависимость

Рисунок
19– Зависимость


Рисунок 19– Зависимость
В САУ с отрицательной гибкой обратной установившееся выходное напряжения в отличии от САУ с положительной жесткой обратной связью всегда постоянное. При корректировании устройства время переходного процесса и максимум выходного напряжения значительно уменьшаются, вследствие чего, уменьшается и перерегулирование (изменяется по тому же закону что и перерегулирование по задающему воздействию в САУ с положительной жесткой обратной связью), а также увеличиваются запасы устойчивости как по фазе, так и по амплитуде.
ЗАКЛЮЧЕНИЕ
В данной лабораторной работе были исследованы характеристики САУ с местными жёсткими и гибкими обратными связями.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1)
Как изменяются параметры инерционных
звеньев, охваченных жёсткой положительной
обратной связью при
 ?
?
Ответ: Инерционные звенья с передаточной функцией

охвачены
положительной корректирующей обратной
связью с передаточной функцией
 .
.
При , звено будет инерционным, а его коэффициент передачи
а постоянная времени

2)
Почему при
 в САУ с жёсткой положительной обратной
связью статическая ошибка равна нулю?
в САУ с жёсткой положительной обратной
связью статическая ошибка равна нулю?
Ответ: при , звено станет интегрирующим(идеальным), система становится астатической, поэтому статическая ошибка равна нулю.
3)
Что
происходит с инерционными звеньями при
их охвате жёсткой положительной обратной
связью с
 ?
?
Ответ: при , звено будет неустойчивым не минимально-фазовым, его передаточная функция

При этом коэффициент передачи

а постоянная времени

4) Почему гибкая отрицательная обратная связь не влияет на статические характеристики САУ?
Ответ: Гибкие обратные связи действуют только в динамическом режиме работы и реализуются посредством включения идеальных или реальных дифференцирующих звеньев.
Гибкая обратная связь действует только во время переходного процесса, а в установившемся режиме ее действие прекращается.
5) Что произойдёт с системой, если её инерционное звено охватить гибкой положительной обратной связью?
Ответ: Пусть инерционное звено с передаточной функцией

охвачено
положительной обратной связью с
коэффициентом передачи
 .
.
Передаточная функция получившегося эквивалентного звена будет иметь вид:

где 

При
 величины
величины
 и
и
 становятся отрицательными и передаточная
функция
становятся отрицательными и передаточная
функция
 становится
такой, что ее полюс
становится
такой, что ее полюс
 будет положительным.
будет положительным.