

Розрахунок параметрів регулятора і елементів контуру регулювання струму у системі підпорядкованого регулювання
Система підпорядкованого регулювання являє собою багатоконтурну систему з каскадним включенням регуляторів. При цьому число регуляторів і контурів регулювання дорівнює числу регульованих параметрів. У двоконтурній схемі (рис.13.1) вихідний сигнал регулятора швидкості, включений у зовнішній контур, є заданим для регулятора струму, включеного у внутрішній контур. Налагодження регуляторів відбувається незалежно і послідовно від внутрішнього контуру до зовнішнього.
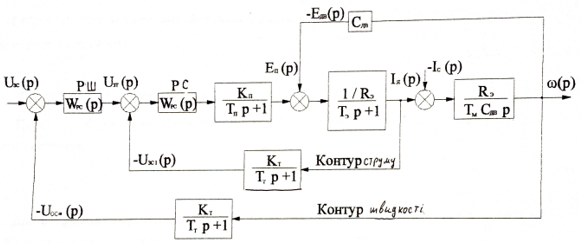
Контур струму складається з об’єкта регулювання – кола якоря двигуна, силового перетворювача і регулятора струму. Контур замикається зворотним зв’язком за величиною напруги, що знімається з датчика струму в колі якоря.
Передатний коефіцієнт зворотного зв’язку по струму:

де Uост – напруга зворотного зв’язку по струму; Uост.мах = UЗТ.мах – напруга завдання максимального струму; Iдв.мах – максимально припустимий струм двигуна в перехідних процесах. Для високомоментного двигуна Iдв.мах = 2 Iн = 36 А, що відповідає режиму роботи в номінальних оборотах. При зменшенні оборотів нижче WH величина Iдв.мах буде коректуватися вузлом залежного токообмеження ВЗТО (у бік збільшення). Отримаємо: Кт = 0.278 В/А.
Налагодження регулятора струму
В наслідок того, що об’єкт регулювання в контурі струму поданий аперіодичними ланками, застосовується ПІ-регулятор струму, що настроюється по модульному (технічному) оптимуму. При стандартному налагодженні контуру струму звичайно зневажають внутрішнім зворотним зв’язком по ЕРС, що справедливо, якщо електро-магнітна (Тэ = 0.0069с) і електромеханічна (Тм = 0.083с) постійні двигуна значно перевершують постійну часу ВП (Тп = 0.0016с), і Тм>>Тэ. У випадку невиконання умов характер перехідного процесу значно відрізняється від оптимального.
Передаточна функція об’єкта регулювання контуру струму, приведеного до контуру з одиничним зворотним зв’язком:
![]()
Об’єкт містить велику постійну часу Тэ і малу Тµ, що називають некомпенсованою малою часу:
Тµ =Тп + Тт ,
де Тт = 0.00066 с (з початкових умов). Отримаємо Тµ = 3.96*10-3 с.
Передатна функція оптимізованого контуру при налагодженні на модульний (технічний) оптимум:

Для одержання перехідного процесу в контурі струму, що відповідає налагодженню на МО, визначимо передатну функцію регулятора струму з рівності:
![]()
Тоді:

Тобто для відповідності перехідного процесу в контурі регулювання струму перехідному процесу в контурі оптимальній структурі, необхідний ПІ-регулятор струму з коефіцієнтом передачі Крт і постійної часу Трт.
Коефіцієнт передачі ПІ-регулятора струму:

Постійна часу ПІ-регулятора струму:

Передатна функція розімкнутого ланцюга контуру струму:
![]()
Розрахунок параметрів регулятора струму
Схема ПІ-регулятора струму представлена на рис. 13.2

Рис.13.2. Схема ПІ-регулятора струму
Для розрахунку параметрів регулятору можна задатися величиною ємності
Сос = 1 мкФ. Постійна часу зворотного зв’язку регулятора:
![]()
Звідси визначимо Rос:

Інші параметри:

Де KДЯ – коефіцієнт передачі датчика струму якоря; KШЯ – коефіцієнт передачі шунта. Розрахуємо:

Вибіраємо номінальний струм шунта з умови ІНШ > ІНП ( ІНШ =60 А).
Коефіцієнт передачі шунта:

Тоді:

Розрахунок параметрів регулятора струму швидкості
Регулювання зовнішнього контуру швидкості
Об’єктом є замкнутий контур струму і ланка, що описує механічний опір двигуна. Передаточна функція об’єкта регулювання контуру швидкості:

Де


Контур замикається інерційно зворотним зв’язком по швидкості з передатною функцією

Де UОСwmax – напруга негативного зворотного зв’язку по швидкості, UОСwmax =UЗСmsx; UЗСmsx – напруга завдання максимальної швидкості, UЗСmsx = 10В; ωmax – максимальна кутова швидкість двигуна;
![]()
Тоді отримуємо Kc=0.038.
Об’єкт регулювання характеризується бульшою постійною часу Тм, для компенсації якої можна застосувати П- або ПІ- регулятори швидкості.
Системи підпорядкувального регулювання з П- регулятором швидкості є інтегрованими однократно. Вони мають достатньо високу швидкодію і мале перерегулювання перехідних процесів, проте мають значний статизм. Такі системи електропривода не спроможні забезпечити великий діапазон регулювання швидкості.-Системи з ПІ-регулятором швидкості називають інтегровані дворазовою Вони забезпечують широкий діапазон регулювання і практично нульову статичну помилку при обуренні по моменту опору. При налагодженні регулятора за симетричний оптимум характеризується перерегулюванням 43%. Зменшити перерегулювання можна шляхом включення на вхід СУ фільтра.
Налагодження П-регулятора швидкості
Схема П-регулятора швидкості представлена на рис

Рис. Схема П-регулятора швидкості
Еквівалентна постійна часу контура швидкості:
![]()
![]()
Передатна функція контуру швидкості з П-регулятором:

Де Тм=0.014 с, Км=0.433, T.μc= 8.52*10^-3 с.
Корекція контуру здійснюється за рахунок зміни коефіцієнта підсилення регулятора:

Визначення
коефіцієнта kПРС
характеризує
налагодження контуру по модульному
оптимуму з коефіцієнтом демпфірування
перехідного процесу
![]() .
.
Перехідна функція оптимізованого контуру швидкості:

Тобто перехідний процес визначає тільки мала стала часу T.μc
Налагодження ПІ-регулятора швидкості
Схема ПІ-регулятора швидкості представлена на рис

Передаточна характеристика розімкненого контуру швидкості з ПІ-регулятором:

При стандартному налагодженні на симетричний оптимум визначимо параметри ПІ-регулятора:


![]()

Підставимо значення КРС і ТРС , одержимо:
![]()
Тобто регулятор компенсував постійну часу, що є більшою – ТМ і динамічні властивості контуру визначаються тільки за малої постійної часу T.μc.
Перехідна функція фільтра на вході СУ з ПІ-регулятором швидкості:

Розрахунок параметрів регулятора швидкості
Для розрахунку параметрів ПІ-регулятора швидкості, задавшись розміром ємності Cос=10-6Ф, визначимо Rос зі співвідношення:
![]()
Тоді:

Інші параметри регулятора:


Для визначення параметрів П-регулятора швидкості можна задатися значенням RЗС=3 кОм і для відомого KPC визначити:
![]()

Побудова статичних характеристик
Визначимо UЗС, відповідно до ω.max, ω.н, ω.min:

Для замкнутої системи справедливим є рівняння:

Для розімкнутої відповідно:
![]()

Статичні характеристики представлені на рис. Пунктиром зображені статичні характеристики для розімкненої системи.
Дослідження перехідних процесів
Початкові дані для розрахунку перехідних процесів зведено у табл.
Таблиця Початкові дані для розрахунку перехідних процесів.
Постійна ЕРС двигуна |
Сдв=1 |
Еквівалентний опір якірного ланцюга двигуна |
Rэ=0.433 |
Електромеханічна постійна часу якірного ланцюга |
|
Електромагнітна постійна часу якірного ланцюга |
|
Постійна часу тиристорного перетворювача |
|
Коефіцієнт передачі тиристорного перетворювача |
|
Коефіцієнт підсилення ПІ-регулятора швидкості |
|
Коефіцієнт підсилення П-регулятора швидкості |
|
Коефіцієнт підсилення ПІ-регулятора струму |
|
Передатний коефіцієнт ЗЗ по струму |
|
Передатний коефіцієнт ЗЗ по швидкості |
|
Постійна часу датчика швидкості |
|
Постійна часу датчика струму |
|
Постійна часу ПІ-регулятора швидкості |
|
Постійна часу ПІ-регулятора струму |
|
Еквівалентна постійна часу контуру швидкості |
|
Перехідні процеси представлені на рис
ПФ
ПІ-регулятора швидкості:

ПФ
П-регулятора швидкості:

ПФ
ПІ-регулятора
струму:

ПФ
тиристорного
перетворювача:

ПФ
датчика струму:

ПФ
датчика швидкості:

ПФ
фільтра:


|
|
|
|
|
141.3361.14.01 |
||||||||
|
|
|
|
|
|||||||||
Зм. |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||
|
|
|
|
|
Літ. |
Аркуш |
Аркушів |
||||||
Студент |
|
|
|
|
У |
|
1 |
|
|||||
|
|
|
|
НУК ім. адм. Макарова |
|||||||||
Викладач |
|
|
|
||||||||||
|
|
|
|
||||||||||