шшшпора
.docxЧто нужно чтобы закрылся динистор.
Чтобы полностью закрыть динистор, необходимо уменьшить ток через него до значения меньше тока удержания.
каким свойством должен обладать вольтметр
Идеальный вольтметр должен обладать бесконечным внутренним сопротивлением
где обычно применяют ёмкостные фильтры
в выпрямителях небольшой мощности (до 10 Вт) при сопротивлениях нагрузки, измеряемых десятками килоом
как изменяется прямое сопротивление биполярного транзистора при повышении тока на базе
уменьшится
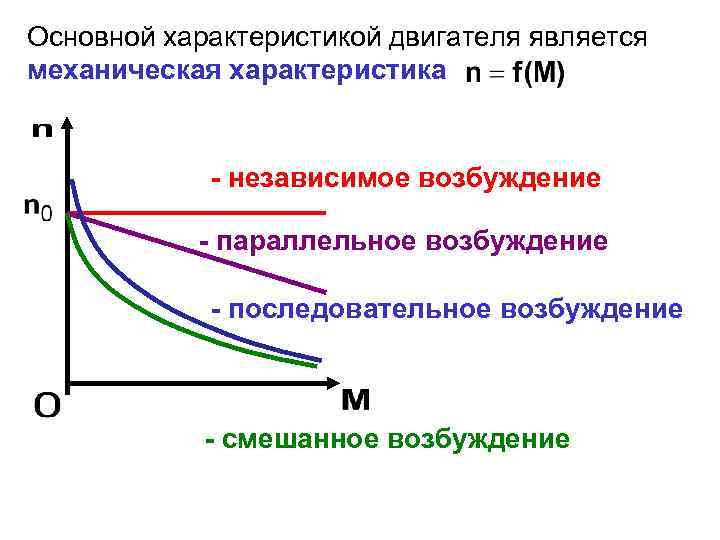
какой вид имеет естественная механическая характеристика двигателя постоянного тока с параллельным возбуждением
какими недостатками обладает способ регулирования трёхфазный асинхронных электродвигателей с помощью изменения величины напряжения
небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения. При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности. Потеря кпд.
сколько требуется ваттметров для измерения полной мощности трёхфазный системы, соединённой звездой без нулевого провода
2
в трехфазных четырехпроводных системах простым является метод 3-х ваттметров.
соединение амперметра и вольтметра
вольт – параллельно
ампер – последовательно
ватт – и так и так
Как меняется характеристика при подключении резисторов разного размера
чем больше резистор, тем сильнее падает частота.
Благодаря малой площади р-n-перехода емкость точечных диодов очень незначительна, поэтому их используют на высоких (порядка сотен мегагерц) и сверхвысоких частотах. Их применяют в основном для выпрямления переменного тока высокой частоты (выпрямительные диоды высоко-частотные) и в импульсных схемах (импульсные диоды). Так как площадь p-n-перехода точечного диода мала, то прямой ток через переход должен быть небольшим (10—20 мА) из-за малой мощ-ности (~10 мВт), рассеиваемой переходом. Поэтому точечные диоды можно использовать для выпрямления только малых переменных токов.
Плоскостные диоды используются для работы на частотах до 10 кГц. Ограничение по частоте связано с большой барьерной емкостью р-n-перехода (до десятков пикофарад). Емкость электрического перехода таких диодов небольшая, время перезарядки емкости мало, поэтому их используют для работы в импульсных режимах (сверхскоростные импульсные диоды).
Двигатели постоянного тока и регулирование
Реостатное — изменение сопротивления цепи якоря
Реостатное регулирование частоты вращения осуществляют введением реостата в цепь якоря. Механическая характеристика становится круто падающей. Частота вращения падает тем значительнее, чем больше сопротивление и момент. Данный метод позволяет уменьшать частоту вращения двигателя. При введении реостата вращение двигателя начинает замедляться, ток и момент возрастают. При М = const ток якоря будет прежним, поэтому электрическая мощность Р = UI не изменится, а механическая мощность Рмех = МО уменьшится. КПД двигателя резко уменьшится. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен. Скорость при данном способе можно регулировать в сторону уменьшения от основной. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки. Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления. Данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы. Реостатное регулирование — не экономичное, его применяют только для двигателей небольшой мощности.
Полюсное регулирование – изменение магнитного потока полюсов
Регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя. При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа больше. Чем больше Rв, тем меньше ток Iв и тем слабее магнитный поток Ф. Полюсное регулирование позволяет увеличивать n вверх от основной характеристики. Характеристики в пределах номинального тока имеют высокую степень жесткости. Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток и поток будут изменяться по экспоненте. В связи с этим регулирование угловой скорости будет осуществляться плавно. Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность. Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма. Этот способ возник и широко применяется в связи с развитием полупроводниковой техники и созданием полупроводниковых диодов в тиристорах и транзисторах.
Якорное — изменение напряжения, подводимого к якорю
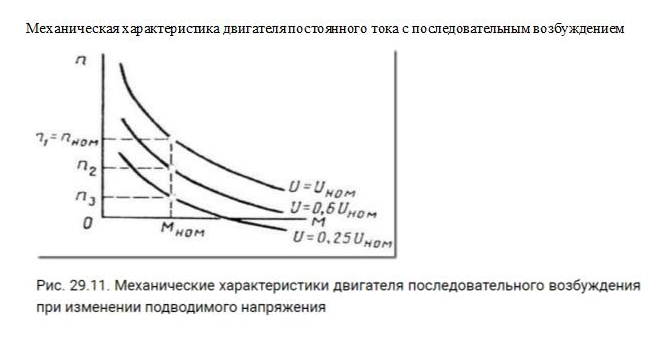
Способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон может быть расширен за счет специальных схем управления. При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя. Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так как регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря.