

Курсовая / КР_Нуртазин_И
.pdfПолученные передаточные функции:
-передаточная функция 
-передаточная функция 
-передаточная функция  ;
;
-передаточная функция  ;
;
-передаточная функция  ;
;
-передаточная функция  ;
;
Текст программы:
%%lab5 clc clear
%%исходные данные
global Ucn Uvn Ce r_j r_v w l_j J k Cm Mcn Wn Potokn In p p2 a10 a11 a20 a21 a22 a23 a30 a31 a32
potok=[0;0.35;0.57;0.72;0.83;0.91;0.97;1.01;1.06;1.07];
F=[0;0.1318;0.2636;0.3954;0.5272;0.659;0.7909;0.9227;1.0545;1.1863]; Ucn=220;% напряжение сети ном
Uvn=220; % напряжение возбуждения
Ce=205;
r_j=0.3; %сопротивление якоря r_v=145; %сопротивление возбуждения w=4000; %витки
l_j=0.1; %индуктивность якоря J=0.35; %момент инерции k=4000;
%%номинальные данные
Cm=200;
Mcn=50;%номинальный поток сопротивления Wn=100;%обороты номинальные Potokn=0.007;%номинальный поток, Вб In=50;%номинальный ток двигателя
%%полином 5 степени
p=[0.6010 0 -0.1446 0 0.4384 0]; p2=polyder(p);
a10 = Uvn/(Potokn*w);
a11 = Uvn;
a20 = 1/(In*l_j);
a21 = Ucn;
a22 = Ce*Wn*Potokn;
a23 = In*r_j;
a30 = 1/(Wn*J);
a31 = Cm*Potokn*In;
a32 = Mcn;
% формирование набора значений моментов времени t = [0:0.01:6];
x0=[0; 0; 0];
u1 = 0.2; u2 = 0;
u = [u1*ones(size(t)); u2*ones(size(t))];
31

x = [1.04; 0.22; 0.463]; P = polyval(p2,x(1)); %%матрицы A B C D
A= [-a10*P, 0, 0; -a22*a20*x(3), -a23*a20, -a22*a20*x(1); a30*a31*x(2),a30*a31*x(1), 0];
B= [0, 0; a21*a20, 0; 0, -a32*a30];
C= [1, 0, 0; 0, 1, 0; 0, 0, 1];
D= [0, 0; 0, 0; 0, 0];
sys = ss(A, B, C, D); sys = tf(sys);
Результаты моделирования приведены на Рис.23-26.
Графики ЛАХ и ЛФХ:
Рис.23 Частотные характеристики ПФ 
32
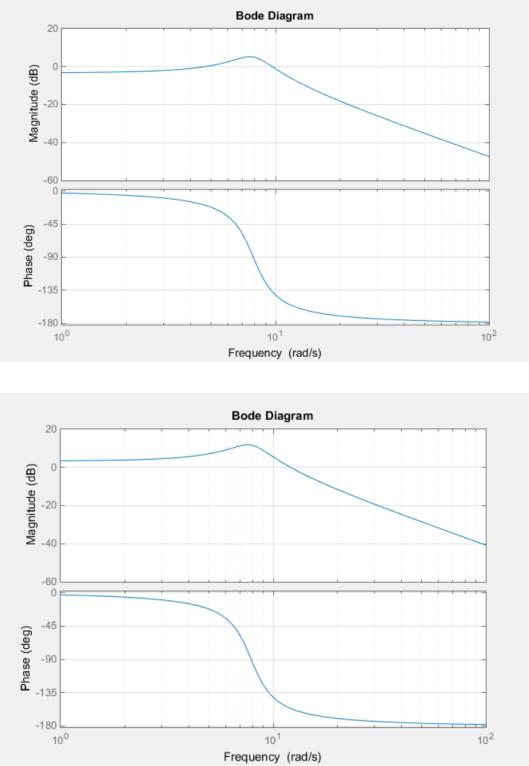
Рис.24 Частотные характеристики ПФ 
Рис.25 Частотные характеристики ПФ 
33

Рис. 26 Частотные характеристики ПФ 
Сравним коэффициенты передачи по АЧХ с коэффициентами передачи линеаризованной системы:
Из переходных процессов из лабораторной работы №4, в которых конечный статический режим от начального отличается изменением только одной компоненты вектора входов, посчитаны коэффициенты передачи.
x2/ u1 = 0.219/0.2 = 1.09;x3/ u1 = 0.312/0.2 = 1.56;
Значения АЧХ при нулевой частоте:
 : A(0) = 1.03;
: A(0) = 1.03;  : A(0) = 1.51;
: A(0) = 1.51;
Частотные и переходные характеристики передаточных функций  и
и  не были приведены, так как сами передаточные функции равны 0.
не были приведены, так как сами передаточные функции равны 0.
Построим графики переходных процессов, чтобы убедиться в схожести форм процессов, рассчитанных в предыдущей работе:
34

Рис.27 Сравнение с переходными процессами тока двигателя линеаризованной системы (справа)
Рис.28 Сравнение с переходными процессами скорости двигателя линеаризованной системы (справа)
Рассчитанные корни, характеристического полинома |
: |
S1 = -1.5 – 7.73i; |
|
S2 = -1.5 + 7.73i; |
|
Переходные характеристики полученных передаточных функций совпадают по форме и типу процесса с результатами из пункта 4. Также линейная система является устойчивой по Ляпунову, т.к. корни характеристического полинома получились комплексно-сопряжёнными с отрицательной вещественной частью.
35
ЗАКЛЮЧЕНИЕ
Вданной курсовой работе было проведено исследование математической модели двигателя постоянного тока независимого возбуждения.
Впервую очередь была получена непрерывная функция,
аппроксимирующая обратную кривую намагничивания на основе метода наименьших квадратов.
Были построены переходные процессы динамической системы с учетом
изменения входного воздействия.
С использованием полученного в первом этапе полинома пятой степени,
были исследованы статические режимы динамической системы при помощи
метода Ньютона.
Сравнение переходных процессов в нелинейной и линеаризованной
системах подтвердило корректность линеаризации при малых отклонениях.
Частотные характеристики показали, что коэффициенты передачи линеаризованной системы и рассчитанные через передаточную функцию сходятся с точностью до сотых. Система является устойчивой, а переходные
процессы носят колебательный характер.
36
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Мирошников А.Н., С.Н. Румянцева. Моделирование систем управления технических средств транспорта. – СПб: Элмор,1999 г. -224 с.
37