

Курсовая / КР_Нуртазин_И
.pdfG=[-P, 0, 0;a21*x(3), a22, a21*x(1);a31*x(2), a31*x(1), 0];
end
Функция, реализующая метод Ньютона:
function [x] = newton( F,G,x0,u,e ) F2=feval(F,x0,u); G2=feval(G,x0,u);
x=x0; while(norm((G2^-1)*F2) > e)
x=x-(G2^-1)*F2; F2=feval(F,x,u); G2=feval(G,x,u);
end
end
График зависимости переменных состояния от изменения входных величин приведен на Рис.14.
Рис.14. График зависимости переменных состояния от изменения входных величин
Исходя из Рис.14 можно сказать, что при изменении момента сопротивления Mc магнитный поток Ф не меняется, скорость вращения падает,
а ток двигателя растёт. При изменении входного напряжения UC магнитный поток Ф и ток двигателя не меняются, а скорость вращения растёт. Такие процессы обусловлены механическими и электромеханическими характеристиками ДПТ независимого возбуждения.
21

4. Исследование линеаризованной математической модели
Рассмотрим систему, представленную в канонической форме Коши:
 ,
,
где 
Для линеаризации выбрали статический режим  , в окрестности
, в окрестности
которого проводится линеаризация. А именно выбрали точку
 .
.
Далее определили матрицы частных производных:
– матрица состояний
 – матрица входов
– матрица входов
 – матрица выходов
– матрица выходов
 – матрица обхода
– матрица обхода
Матрицы  имеют постоянные коэффициенты, зависящие от
имеют постоянные коэффициенты, зависящие от
статического режима.
В итоге, получили систему
22

Здесь переменные |
и |
называются приращениями (или |
отклонениями) переменных  и
и  относительно значений
относительно значений  и
и  .
.
СНДУ, записанные в форме Коши:
Уравнения выходов: |
|
Как выходы в данной системе заданы ток возбуждения |
и угловая |
скорость . |
|
 ;
;
 ;
;
 ;
;
 =
= ; 23
; 23

 =
=
Уравнения f(x,u):
Текст программы:
%%lab4 clc clear
%%исходные данные
global Ucn Uvn Ce r_j r_v w l_j J k Cm Mcn Wn Potokn In p p2 a10 a11 a20 a21 a22 a23 a30 a31 a32 b1 b2 potok=[0;0.35;0.57;0.72;0.83;0.91;0.97;1.01;1.06;1.07]; F=[0;0.1318;0.2636;0.3954;0.5272;0.659;0.7909;0.9227;1.0545;1.1863]; Ucn=220;% напряжение сети ном
Uvn=220; % напряжение возбуждения
Ce=205;
r_j=0.3; %сопротивление якоря r_v=145; %сопротивление возбуждения w=4000; %витки
l_j=0.1; %индуктивность якоря J=0.35; %момент инерции k=4000;
%%номинальные данные
Cm=200;
Mcn=50;%номинальный поток сопротивления Wn=100;%обороты номинальные Potokn=0.007;%номинальный поток, Вб In=50;%номинальный ток двигателя %%полином 5 степени
p=[0.6010 0 -0.1446 0 0.4384 0]; p2=polyder(p);
a10 = Uvn/(Potokn*w);
a11 = Uvn;
a20 = 1/(In*l_j);
a21 = Ucn;
a22 = Ce*Wn*Potokn;
a23 = In*r_j;
a30 = 1/(Wn*J);
a31 = Cm*Potokn*In;
a32 = Mcn;
b1 = Uvn/r_v*w;
24
b2 = Wn;
%% Uc+20%
t = [0:0.01:6]; x0=[0; 0; 0];
u1 = 0.2; u2 = 0;
u = [u1*ones(size(t)); u2*ones(size(t))]; x = [1.04; 0.22; 0.463];
P = polyval(p2,x(1)); %%матрицы A B C D
A= [-a10*P, 0, 0; -a22*a20*x(3), -a23*a20, -a22*a20*x(1); a30*a31*x(2),a30*a31*x(1), 0];
B= [0, 0; a21*a20, 0; 0, -a32*a30];
C= [b1*P, 0, 0; 0, 0, b2];
D= [0,0;0, 0];
[Y, X] = lmsim(A,B,C,D,t,x0,u);
figure(1); hold on; plot(t,(X(3,:)+x(3))); grid on; xlabel('t,с');ylabel('W,
об/мин');
figure(2); hold on; plot(t,(X(2,:)+x(2))); grid on; xlabel('t,с');ylabel('iд, А');
figure(3); hold on; plot(t,(X(1,:)+x(1))); grid on; xlabel('t,с');ylabel('Ф, Вб');
figure(4); hold on; p = poly(A); lmd = roots(p); xlabel('Re');ylabel('Im'); plot(real(lmd),imag(lmd),'*'); grid on;
%% Uc-20%
t = [0:0.01:6]; x0=[0; 0; 0];
u1 = -0.2; u2 = 0;
u = [u1*ones(size(t)); u2*ones(size(t))]; x = [1.04; 0.22; 0.463];
P = polyval(p2,x(1)); %%матрицы A B C D
A= [-a10*P, 0, 0; -a22*a20*x(3), -a23*a20, -a22*a20*x(1); a30*a31*x(2),a30*a31*x(1), 0];
B= [0, 0; a21*a20, 0; 0, -a32*a30];
C= [b1*P, 0, 0; 0, 0, b2];
D= [0,0;0, 0];
[Y, X] = lmsim(A,B,C,D,t,x0,u);
figure(1); hold on; plot(t,(X(3,:)+x(3))); grid on; xlabel('t,с');ylabel('W,
об/мин');
figure(2); hold on; plot(t,(X(2,:)+x(2))); grid on; xlabel('t,с');ylabel('iд, А');
figure(3); hold on; plot(t,(X(1,:)+x(1))); grid on; xlabel('t,с');ylabel('Ф, Вб');
Функция lmsim:
function [y,x]=lmsim(a,b,c,d,t,x0,u)
%
%simulation of linear system
%dx(t)/dt=Ax(t)+Bu(t)
% |
y(t)=Cx(t)+du(t) |
% |
|
% |
x(0)=x0 |
% |
|
% |
t - vector-string of simulation time |
%x0 - vector-column of initial conditions
%u - matrice of controls (number of columns is equal to length of
vector t
% |
number of strings is equal to number of |
outputs) |
|
% |
|
% |
|
|
25 |
h=t(2)-t(1);
%matrix exponent [m,n] = size(a);
[m,nb] = size(b);
s = expm([[a b]*h; zeros(nb,n+nb)]); p = s(1:n,1:n);
g= s(1:n,n+1:n+nb);
%time process
%
x=(ltitr(p,g,u',x0'))';
y=c*x+d*u;
Результаты реализации программы и моделирования приведены на Рис.15-22.
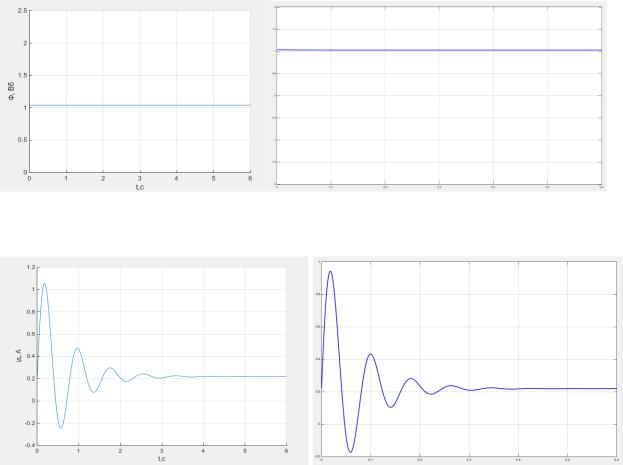
Динамический режим(+20%Uc)
Переходные процессы переменных состояния:
Рис.15 – Сравнение магнитного потока линеаризованной(слева) и нелинейной систем
Рис.16 – Сравнение тока двигателя линеаризованной (слева) и нелинейной систем
26

Рис.17 – Сравнение скорости вращения двигателя линеаризованной (слева) и нелинейной систем
Рис.18 – График изменения тока двигателя при изменении входного воздействия на +/- 20%
Рис.19 – График изменения скорости двигателя при изменении входного воздействия на +/- 20%
27

Переходные процессы выходных значений (ток возбуждения и угловая скорость):
Рис.20 – Переходный процесс тока возбуждения
Рис.21 – Переходный процесс угловой скорости
Рис.22 – Корни полинома матрицы А
28
Переходные процессы полученной линеаризованной системы сходятся с результатами переходных процессов нелинейной системы с небольшими отклонениями. Система является устойчивой по Ляпунову, т.к. вещественные части всех собственных чисел матрицы А являются отрицательными.
29

5. Расчет передаточных функций и частотных характеристик
динамической системы
Для определения ПФ необходимо было рассчитать матрицы A B C D, принять условие, что выход функции – это вектор состояние, следовательно, матрица С – единичная, D - нулевая.
Матрица A и B были взяты из пункта 4, размерность матрицы С – квадратная единичная матрица, так как выходов 3, размерность матрицы 3х3.
Умножение матриц С и D должно дать вектор столбец входов, так как входов 2, следовательно, размерность матрицы D – 3x2.
Матрицы A, B, C, D:
;
;
= |
; |
|
; |
 ;
;
 ;
;
 ;
;
30