

Часть 4. Определение аэродинамического сопротивления
Аэродинамическое сопротивление имеет вид:
 .
.
Коэффициент
аэродинамического сопротивления
 в штилевых условиях с достаточной
точностью можно аппроксимировать
следующей формулой [Знамеровкий,с.59]:
в штилевых условиях с достаточной
точностью можно аппроксимировать
следующей формулой [Знамеровкий,с.59]:
 ,
,
где
 ÷
÷ .
.
В
расчетах можно принять
 ÷
÷ .
.
В случае, если на палубе нет кранов и тп – выбираем 0.7, иначе 0.8
Все расчеты ведем для встречного воздушного потока gamma_a = 0
Вычисляем пп 32 33 34
Часть 5. Определение сопротивления руля
Данный п делается только в случае наличия рулей
Предварительно требуется по чертежу определить площадь руля – п 35
Сопротивление
руля зависит от угла атаки
 и скорости натекания потока воды
и скорости натекания потока воды
 на руль:
на руль:
 .
.
При
исследовании системы ДАУ приближенно
можно принять
 (то есть не учитывать косое натекание
потока воды на руль) и
(то есть не учитывать косое натекание
потока воды на руль) и
 (то есть не учитывать влияние работы
гребного винта на скорость натекания
потока воды на руль).
(то есть не учитывать влияние работы
гребного винта на скорость натекания
потока воды на руль).
В расчетах можно принять

где
угол
 в радианах, коэффициенты
в радианах, коэффициенты
 ,
,
 ,
,
 .
.
При движении прямым курсом руль не всегда переложен в ДП (т е угол перекладки руля не всегда 0). Требуется компенсировать возмущения, будем полагать, что угол преекладки руля при работе авторулевого не более 10 градусов, и для этой величины посчитаем доп сопротвиление.
Часть 6. Определение дополнительного сопротивления на волнении
Доп сопротивление на волнении – по формуле Шифрина справочник т 3 с 180
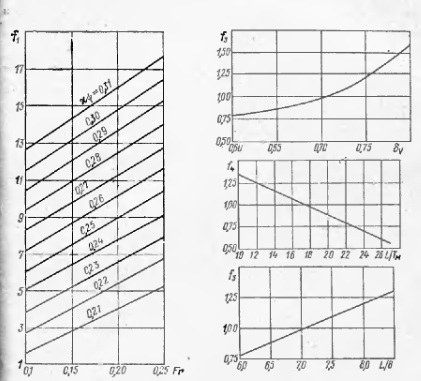
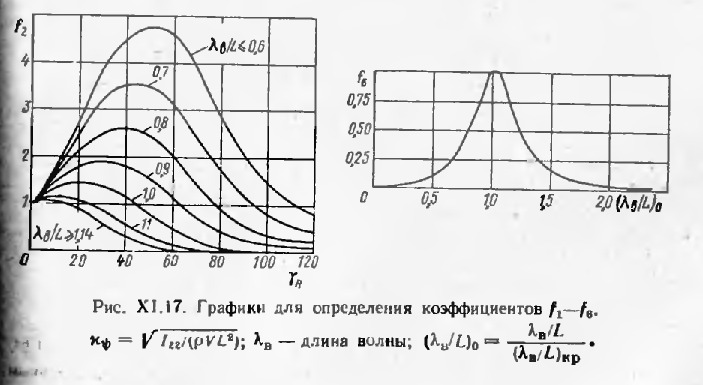
Параметры волнения из таблицы ниже
Шкала ГУГМС-53. Таблица 1.2.
Ветер (шкала Бофорта) |
Море (шкала ГУГМС-53) |
|||
Баллы |
Баллы |
|
Длина волны, м |
Периоды волн, с |
0 - 1 |
0 |
0 |
0 |
- |
2 |
1 |
0.1 - 0.25 |
1 – 2.5 |
1 - 2 |
2 - 3 |
2 |
0.25 - 0.75 |
2.5 - 7.5 |
2 - 3 |
3 |
3 |
0.75 - 1.25 |
7.5 - 14 |
3 - 4 |
4 |
4 |
1.25 - 2.0 |
14 - 26 |
4 - 5 |
5 - 6 |
5 |
2.0 - 3.5 |
26 - 58 |
5 - 6.5 |
7 |
6 |
3.5 - 6.0 |
58 - 115 |
6.5 - 8.5 |
8 |
7 |
6.0 - 8.5 |
115 - 190 |
8.5 - 10 |
9 |
8 |
8.5 - 11.0 |
190 - 270 |
10 - 12 |
10-12 |
9 |
|
270 |
- |
 ,м
,м 11.0
11.0
Часть 7. Определение присоединенных масс корпуса
Присоединенные массы lam11, lam22 считаем по эквивалентному эллипсоиду
Lam11 = k11*m
Lam22=k22*m
K11, k22 (p,q)
Где p = a/b, q=c/b
Для судна a=L/2, b=B/2, c=Tm
Параметры эллипсоида заносятся в п42
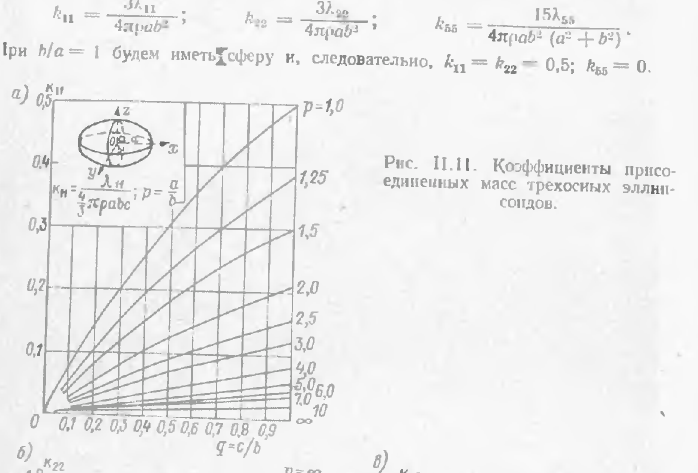
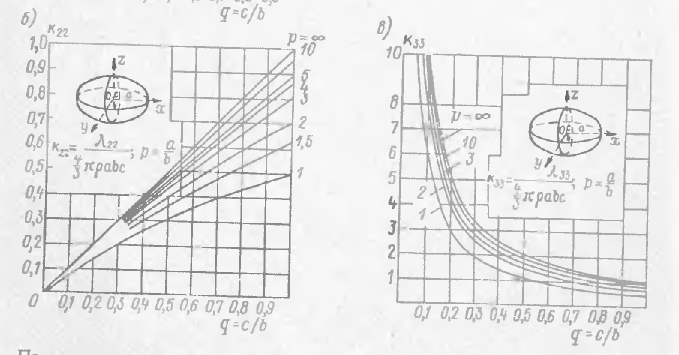
Коэффициенты п 43, 44 определяются с рисунков а) и б ) соответственно
Присоедиенные массы вычисляются по формулам и заносятся в пп 45 46
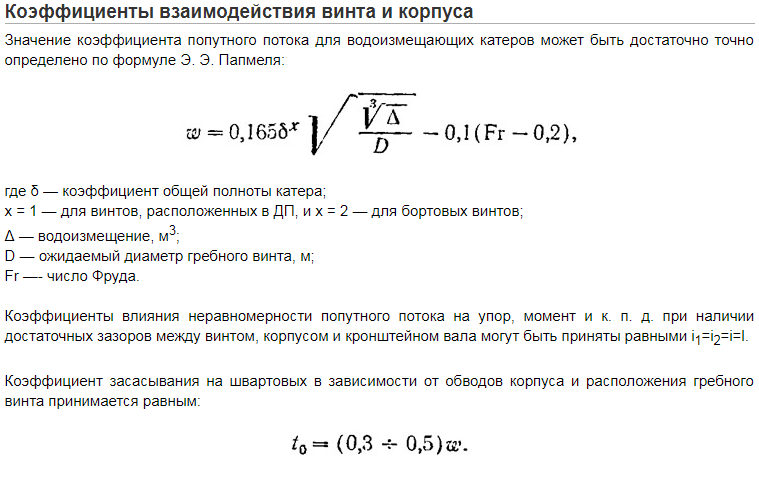
Часть 8. Определение параметров гребного винта и сил от него
Вначале считаем пп 69-72
Используя формулу
где CA - адмиралтейский коэффициент.
В нее подставляется объемное водоизмещение в куб.м, скорость судна в уз, мощность суммарная всех ГД в л.с.
Затем по данным определяются:
П47 – диаметр винта снять с чертежа
П53 Максимальные обороты двигателя (об/мин) – из данных или спросить у преподавателя
П 52 – зададется преподавателем к-т упора в швартовном режиме
Затем определяется группа вопросов, связанных с силами, создаваемыми винтом
Пп 48, 50, 51 - только если есть в данных
П 49 – написать винт или ВРК (определить по чертежу)
П 54 – посчитать по формуле

n частота вращения двигателя об/сек, диаметр в метрах, упор получится в Н
записать в кН (K1 шв берется из п 52)
П 55 – при фиксированном K1шв нарисовать таблицу/график (парабола)
Пп 56, 57 – коэффициенты взаимодействия
0.3 если винт на кронштейне, 0.5 если близко к корпусу
В наших обозначениях Kw вместо w, Kt вместо t
К-т засасывания на полном ходу принимаем тот же, что в швартовном режиме
После того, как определили взаимодействие, определяем поступь полного хода
П 58

П 59 – по данным по двигателю. Если дизель – 25-30% максимальных, если электродвигатель – 0
П 60 – постоянная поступь, V~n при n от минимальных до максимальных
Затем рисуется кривая действия K1(lam) от руки по заданным
K1шв – задано в п 52
Поступи нулевого упора (по умолчанию 0.9)
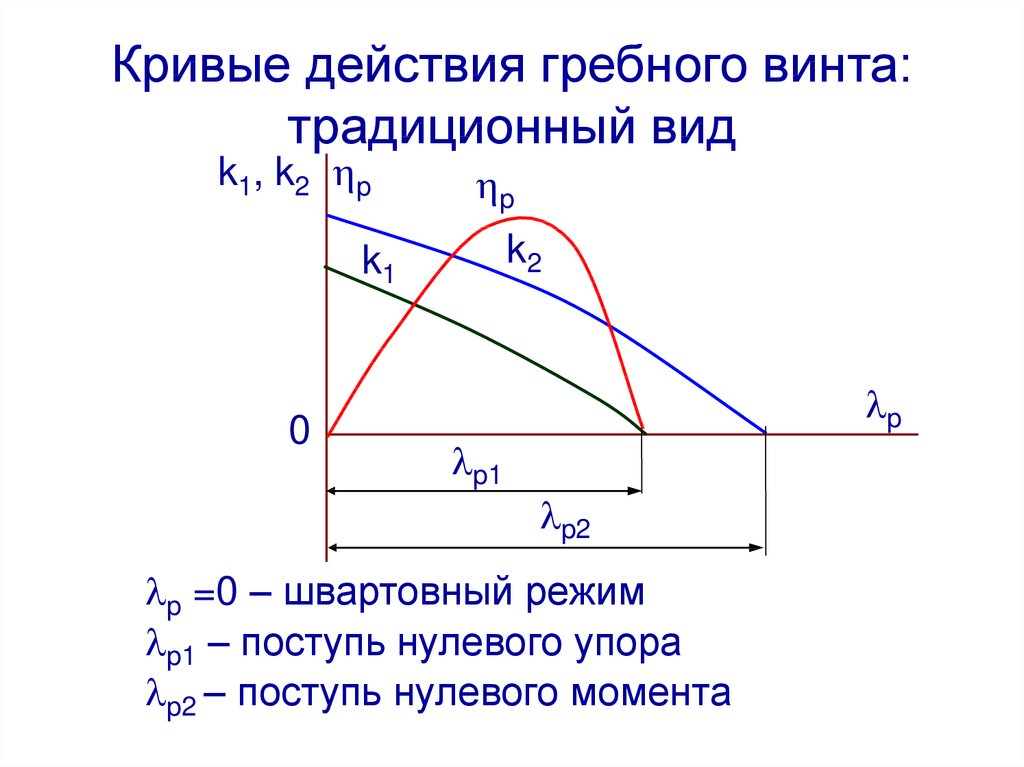 По
полученной кривой и полученной поступи
(п 58) определяется п 61 – коэфф упора на
полном ходу
По
полученной кривой и полученной поступи
(п 58) определяется п 61 – коэфф упора на
полном ходу
П 62 По полученному к-ту пересчитывается упор

П 63 с учетом к-та засасывания считается тяга
Te = (1-Kt)*T
Замечание - Значение тяги (суммарной от всех винтов) приблизительно равно сопротивлению корпуса (п 31)
Затем определяется группа вопросов, связанных с моментами на валу главного двигателя
Сначала п 67
Qmax = Pmax/(2*pi*n)
Мощность - каждого двигателя, в Вт
Момент в Нм
n об/с
Затем п 66
Определяется коэффициент момента K2
K2 = Qmax/() из формулы
 ,
,
Считаем, что максимальная мощность развивается на полном ходу.
Рисуем рисунок
K2 примерно в 5-10 раз меньше K1
П 65 – определяем по нарисованному графику швартовный к-т момента
Для буксиров – максимальная мощность реализуется в шв режиме
П 68 – это полная мощность, кроме буксиров
Для буксиров – посчитать
Приложение 1.