защита лабораторных / Zaschita_4_laboratornaya
.docxЧто такое алгоритм управления (закон управления)?
Функциональная зависимость, в соответствии с которой формируется управляющее воздействие на объект управления. (самостоятельная динам. система, на вход которой поступает информация от измерителей, а выходом служит вектор управляющих воздействий)
Поддержание регулируемой координаты на заданном уровне.
3 основных принципа управления:
принцип разомкнутого управления
принцип компенсации или управления по возмущению
принцип о.с. или регулирования по отклонению
Какие возможны цели управления динамической системой?
Требования к управлению
Устойчивость (минимальное требование к системе)
Точность – поддержание значения выхода системы (динамическая и статическая ошибка в определенных пределах, астатизм – отсутствие ошибки, при некотором постоянном возмущении)
Качество ПП (качество динамки)
Робастность – невосприимчивость к неопределенностям параметрам математической модели (матрицы А и В) или к внешним воздействиям (сохранение устойчивости при небольшом изменении динамики и свойств объекта)
Повышение точности приводит к ухудшению качества динамики
Основные задачи:
Стабилизация – поддержание выходных величин системы
Какие достоинства и недостатки модального управления ДС?
Достоинство:
Задаемся набором полюсов, которые задают определенно качество динамики (хорошо подходит. Когда задача состоит в формировании определенных качеств динамики, так как задаем определенные полюса)
Хорошо работает при скалярном управлении (когда одно управление)
Недостатки
Плохо работает при векторном управлении (когда несколько управлений) (ограниченное применение при векторном управлении – из бесконечного множества выбрать один набор)
Неограниченность (тут хз, он про это не говорил, но ты тип можешь задать любые корни хп, но они могут физически не реализовываться)
Какие достоинства и недостатки линейного квадратичного регулятора?
Достоинства:
Сколь угодно управлений
Недостатки:
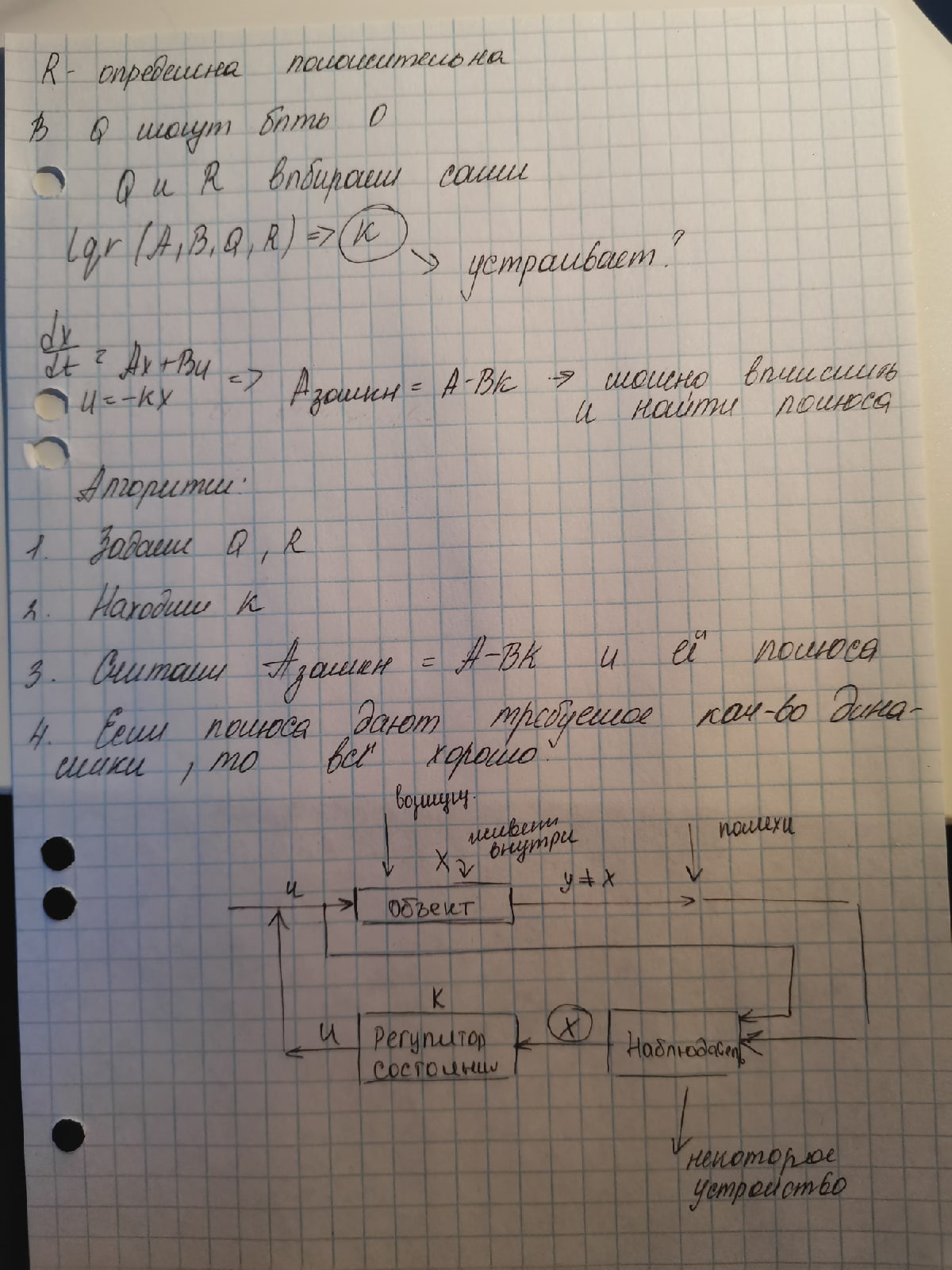
Если полюса замкнутой системы дают требуемые качества динамики, то все в порядке. Если матрица К дает не нормальные динамические свойства, то каким-то образом меняем Q и R (нет очевидной связи между весовыми матрицами и полюсами системы – более сложная процедура по сравнению с модальным управлением)
При каких условиях реализуем алгоритм управления в виде регулятора состояния?
Если объект управления управляем по Калману
Система должна быть:
Управляема
Наличие вектора состояния х (из датчиков – в реальных случаях)
Если нет информации о векторе состояния, то необходим наблюдатель. Задачи наблюдателя:
Получая информацию о входе и выходе системы, найти оценку вектора состояния (Фильтр Калмана – пример)
Фильтрует высокочастотные помехи (вторая задача)
Поясните связь корней ХП с качеством динамики замкнутой системы?
Собственные числа(полюса) = корни ХП
Коэффициенты полинома зависят от матрицы К
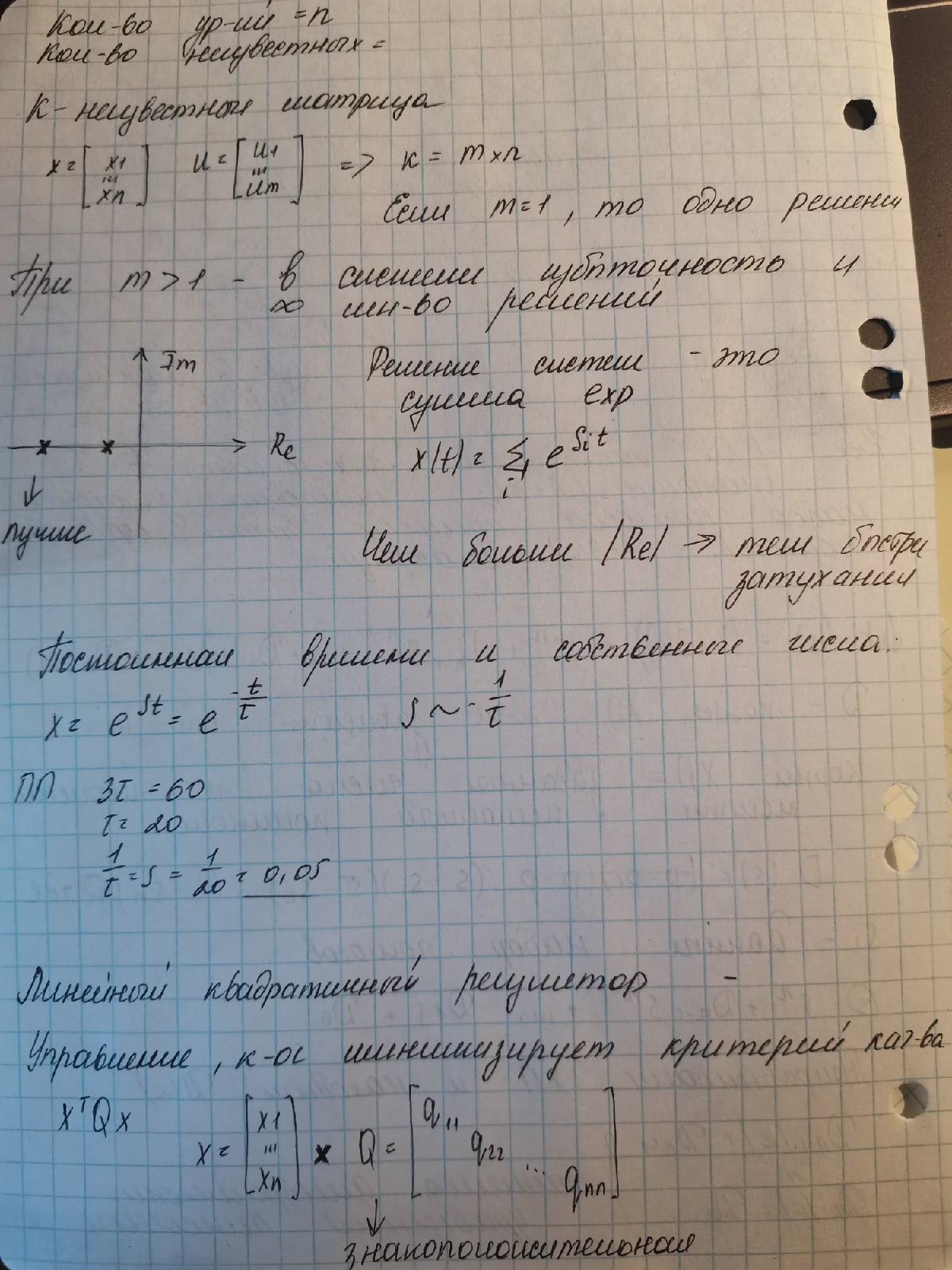
Корни ХП определяют динамику системы (качество динамики полностью задается полюсами), например, быстродействие или степень затухания – тау – время за которое сигнал уменьшается в е раз .
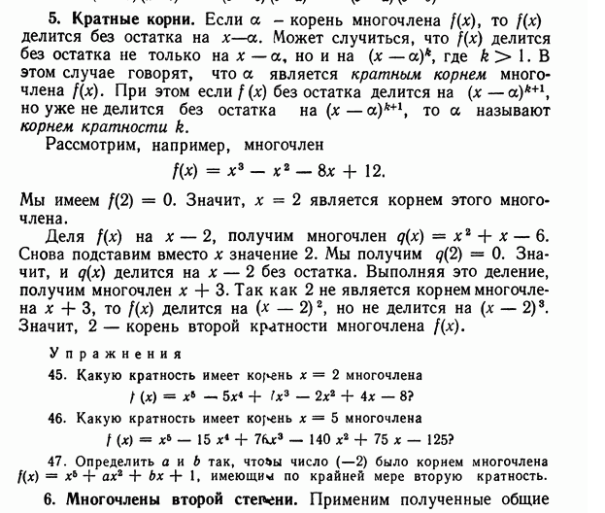
Кратность корней нарушает время переходного процесса
Комплексно-сопряженные корни дают колебательность (задаем в зоне «треугольника»)
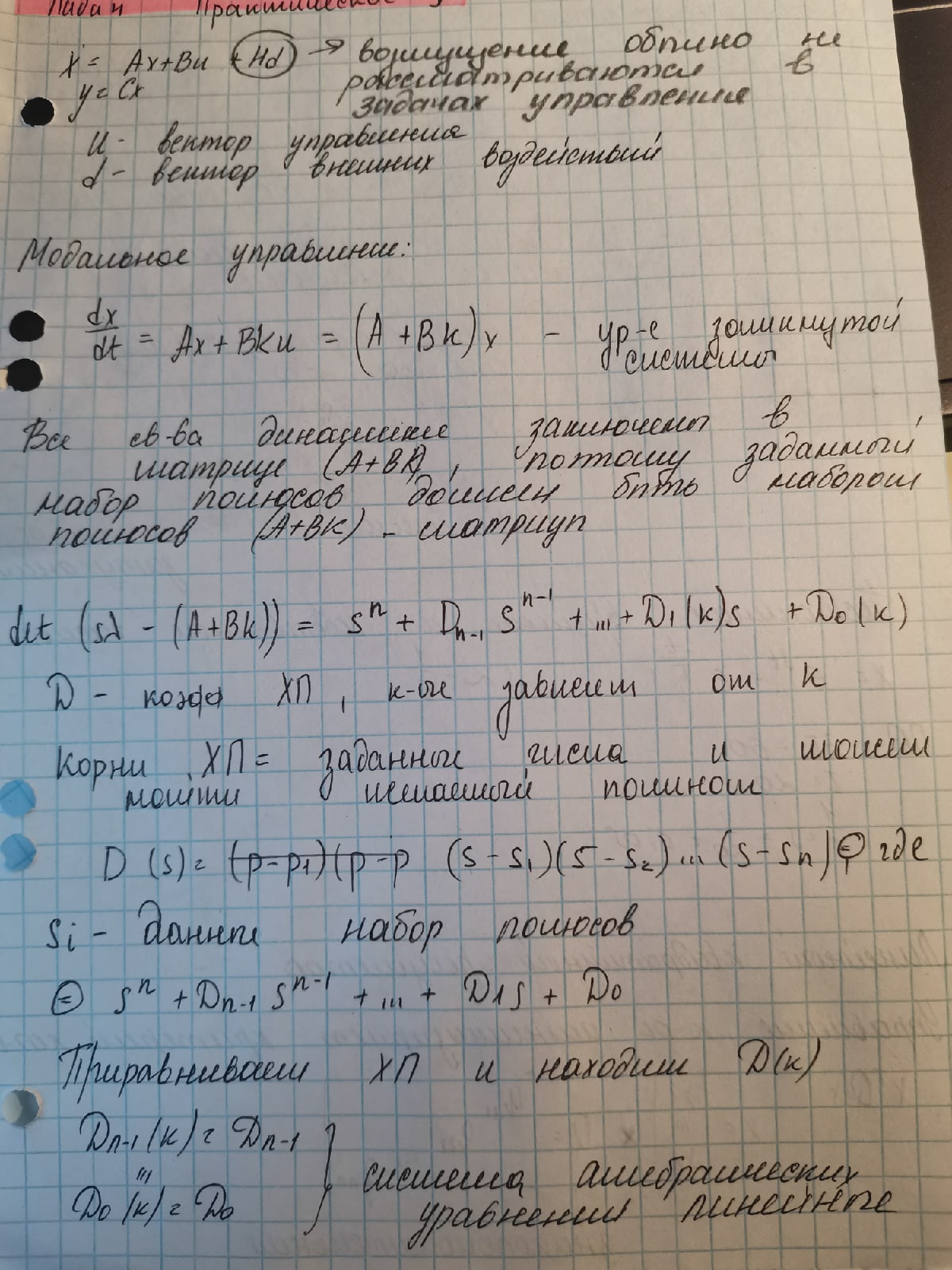
dx/dt = Ax+BKx=(A+BK)x все свойства динамики
Чем мы жертвуем, увеличивая быстродействие?
Коэффициенты К модального регулятора увеличиваются, а значит становится сложнее и дороже реализовать данную систему физически. (как сказал шпек, т.к. мы регулируем скорость перекладки руля, а она не может быть очень большой из-за физических ограничений)
ПРАКТИКА
Машинные методы параметрического синтеза
Цель: подобрать такие параметры регулятора, которые обеспечат нахождение ПХ в «коридоре»
Response Optimization- Оптимизирует параметры регулятора, чтобы соответствовать требованиям переходного процесса
При параметрическом синтезе определяются именно параметры элементов, так как структура должна быть задана.
Когда не надо знать всю эту лабуду, а пользоваться блоком в матлабе
ЛАБА (ЕГО СЛОВА С ПРАКТИКИ В ЗУМЕ)
Решить задачу управления - это найти функцию u(t).
dx/dt = Ax +Bu
u = -Kx
Цели управления (выше написала во 2 вопросе)
Основные методы синтеза, которые обеспечивают качество динамики: модальное управление и
Задача модального управления: У нас есть набор полюсов. Необходимо подобрать такие коэффициенты обратной связи К, при которых собственные числа (полюса) замкнутой системы будут соответствовать заданному набору полюсов.
K=-place(A,B,P). Здесь K – выходной параметр – искомая матрица коэффициентов регулятора, A,B – матрицы уравнений объекта, P – вектор с комплексными компонентами – желаемыми корнями характеристического полинома замкнутой системы.
Функция будет работать в том случае, если объект является вполне управляемым по Калману, а вектор P не содержит кратных корней.
Объект является вполне
управляемым по Калману – если ранг
составной rank|B |
матрицы равен порядку системы. Ранг-
наивысший порядок миноров матрицы
отличных от 0.
|
матрицы равен порядку системы. Ранг-
наивысший порядок миноров матрицы
отличных от 0.
Как проверить, что всё сделано правильно? Найти корни (А+ВК), они должны быть равны вектору р
Можно подставить уравнение регулятора в уравнение объекта.
Почему мы изменяем эту хрень вот так? set(SYS_SS, 'C', eye(5)); потому что у нас 5 переменных состояния и один вход, и один выход, для того, чтобы замкнуть систему нам нужно 5 выходных переменных (но это не точно), а почему единичная ? хз, потому что, наверное, такая матрица не привнесет никаких изменений при замыкании
s1=lft(SYS_SS,K,1- nu,5-ny) - Эта цепь обратной связи соединяет первые выходы nu сист К с последним входом nu SYS_SS (сигналы U), а последний выход ny SYS_SS с первым ny входом K. Результирующая система sys отображает входной вектор [w1 ; w2] в выходной вектор [z1 ; z2].
s1=lft(SYS_SS,K,1,5)
set(s1, 'B', [2;0;0;0;0], 'C', [0 0.345 0.7314 0.117 0.09427]) делаю так, потому что получается пустая матрица В размером 5 на 0 и матрица С размером 0 на 5.