

Лабораторные работы (не мои) / Geu_2
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра САУ
отчет
по лабораторной работе №2
по дисциплине «Гребные электрические установки»
Тема: «Подруливающее устройство с асинхронным электродвигателем и преобразователем частоты по типу неуправляемый выпрямитель - автономный инвертор».
Студенты гр. 6408
|
|
|
Преподаватель |
|
Малышев С.М. |
Санкт-Петербург
2019
Краткое описание и порядок выполнения работы
Типовая структурная электрическая схема электропривода туннельного подруливающего устройства приведена на рис. 1.
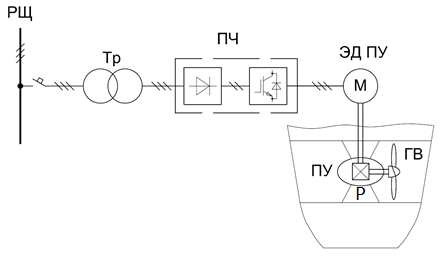
Рис. 1. Структурная электрическая схема электропривода туннельного подруливающего устройства
РЩ – распределительный щит; Тр – трансформатор; ПЧ – преобразователь частоты;
ЭД ПУ – электродвигатель подруливающего устройства; ПУ – подруливающее устройство; ГВ – гребной винт; Р – редуктор
Пример схемы расположения носового туннельного подруливающего устройства представлен на рис. 2.
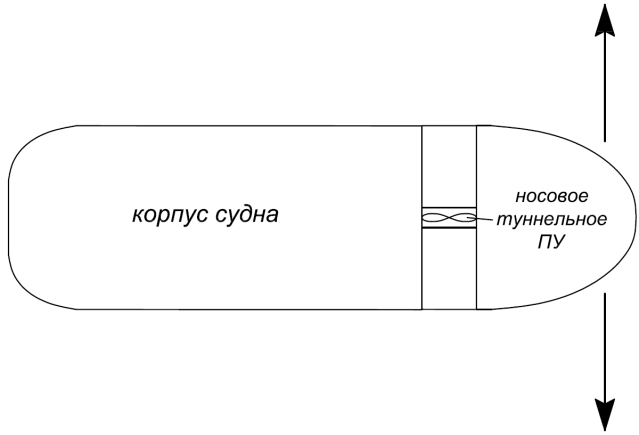
Рис. 2. Схема расположения носового туннельного подруливающего устройства
Особенности:
Механическая передача вращающего момента на винт через понижающий редуктор.
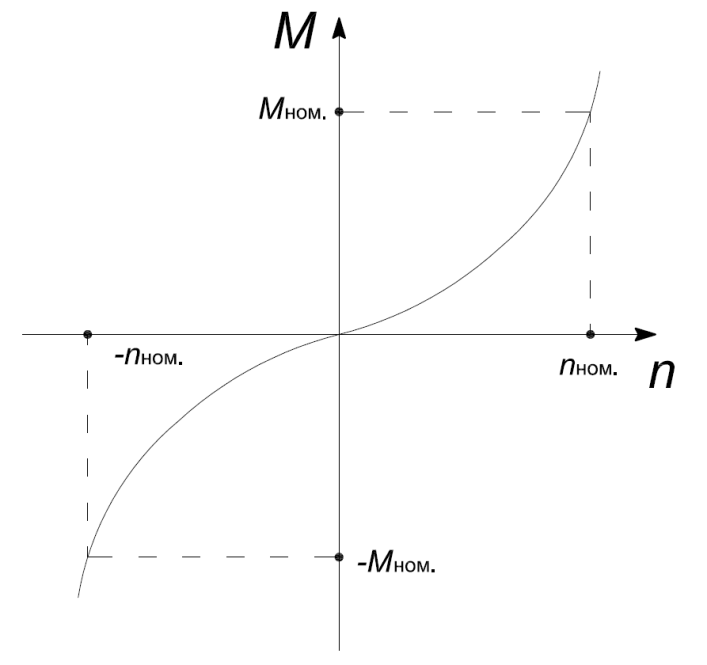
Рис. 3. Механическая характеристика подруливающего устройства
Винт работает по швартовной реверсивной характеристике. Рекуперация электрической энергии в сеть – отсутствует, так как практически нет выбега судна и работа винта в режиме гидротурбины отсутствует при торможении.
Момент гребного винта подруливающего устройства равен моменту электродвигателя подруливающего устройства (МГВ = М ЭД ПУ).
n = 60 * f (50-60) / p (1) = 3000
Диапазон изменения частоты вращения:
-nном < nЭД ПУ < + nном,
Частота вращения в зависимости от типа ЭД может изменяться в диапазоне:
nном.ЭД ПУ =~ 500 … 1500 об/мин;
Частота винта составляет:
nном.винта =~ 200 об/мин
Законы управления:
Поддержание постоянства заданной частоты вращения.
Поскольку скорость разгона электродвигателя подруливающего устройства (ЭД ПУ) незначительное, а инерционность судна велика, отсутствует необходимость увеличения тока выше номинального для сокращения времени разгона ПУ. То есть, разгон происходит при номинальном токе или токе не превышающем 110% от номинальной величины. Следовательно, для уменьшения износа оборудования рационально системой управления ПЧ ограничивать пусковой ток и момент ЭД ПУ.
Ход работы:
Определение в диапазоне частоты вращения от -700 до 700 об/мин показания значений момента, частоты вращения, мощности, тока, напряжения и частоты тока электропривода ПУ.
Таблица 1
№
|
nГЭД , мин-1 |
UЭД ПУ, В |
f ПЧ, Гц |
I ЭД ПУ, А |
PЭД ПУ, кВт |
МЭД ПУ, Н*м |
||||
1 |
-400 |
149 |
20 |
3,3 |
38 |
-0,9 |
||||
2 |
-300 |
113 |
15 |
3,6 |
26 |
-0,85 |
||||
3 |
-200 |
77 |
10 |
3,57 |
16 |
-0,75 |
||||
4 |
-100 |
44 |
5 |
3,6 |
2 |
-0,25 |
||||
5 |
0 |
0 |
0 |
3,63 |
0 |
-0,02 |
||||
6 |
100 |
44 |
5 |
3,61 |
2 |
0,25 |
||||
7 |
200 |
77 |
10 |
3,57 |
16 |
0,75 |
||||
8 |
300 |
113 |
15 |
3,6 |
26 |
0,82 |
||||
9 |
400 |
149 |
20 |
3,6 |
38 |
0,9 |
||||
Построение статических характеристик.
 Рисунок 5. U
= f
(f)
Рисунок 5. U
= f
(f)
Рисунок 6. n = f (f)
Рисунок 7. M = f (n)

Рисунок 8. n = f (P)
Переходные характеристики пуска и останова ЭД ПУ до разной частоты вращения.
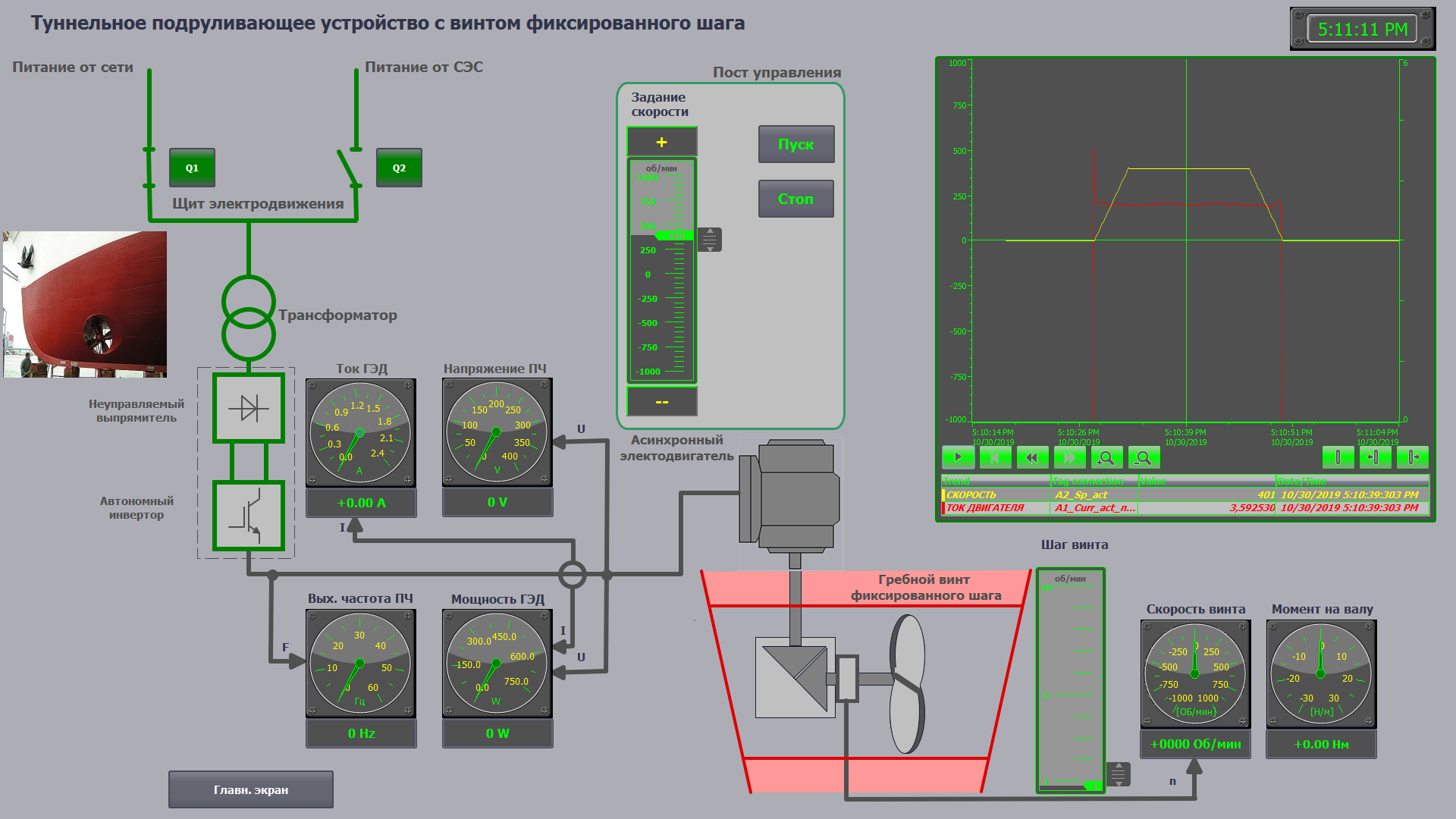
Рисунок 9 . График n = f (t) для n 0-400-0
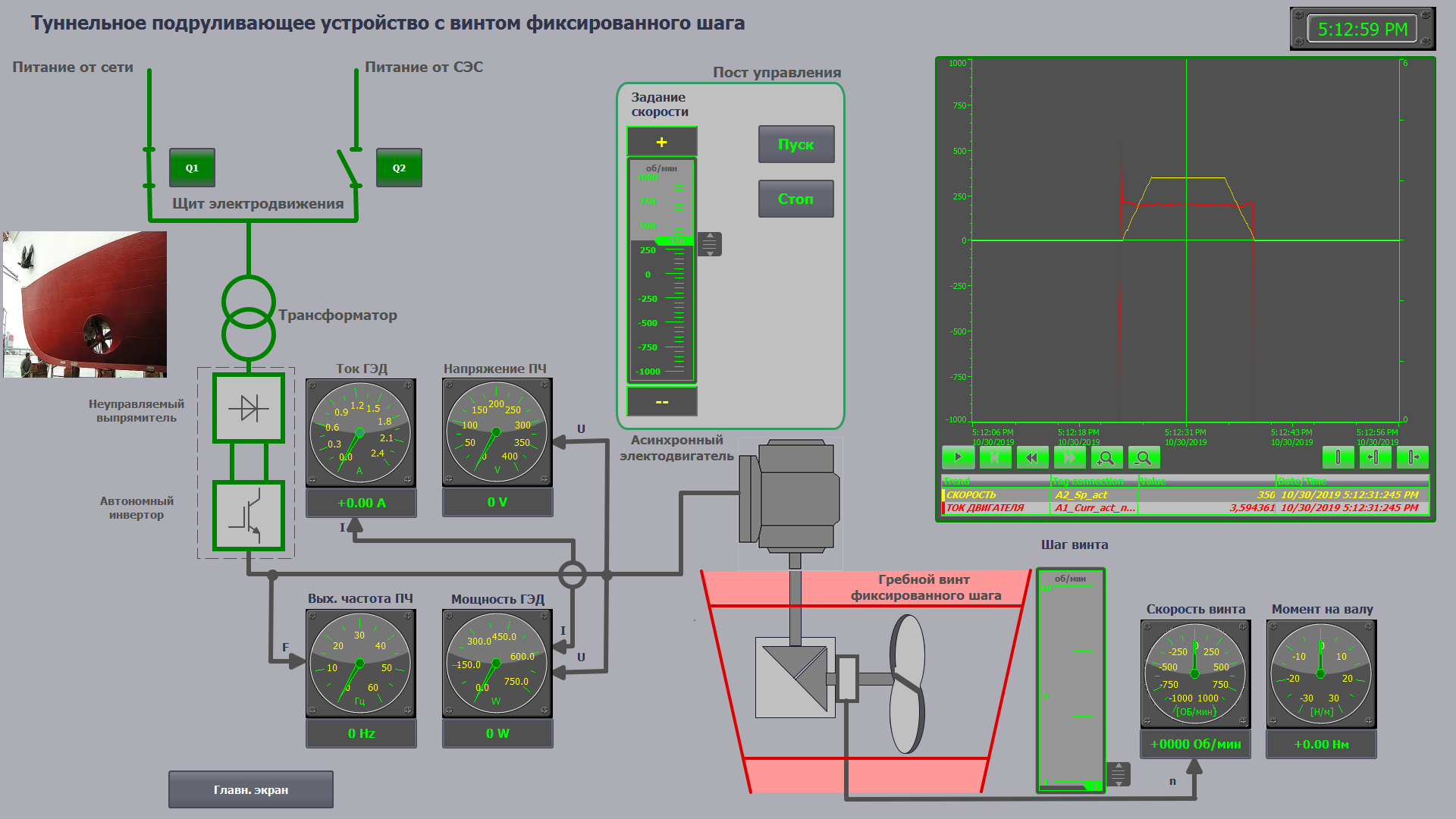
Рисунок 10. График n = f (t) для n 0-350-0
Реверсивные характеристики ЭП.

Рисунок 11 . График n = f (t) для n от +400 до -400
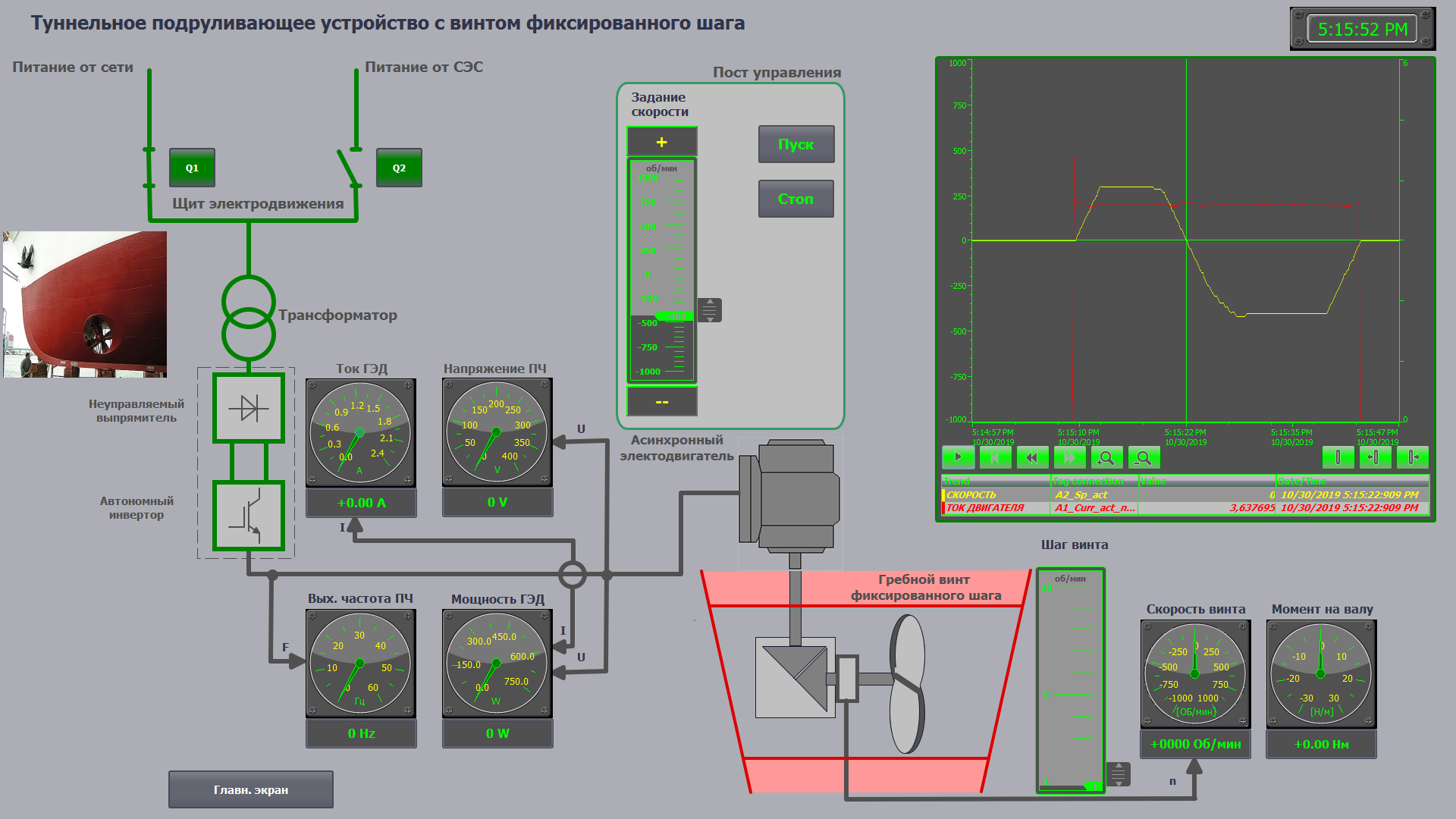
Рисунок 12 . График n = f (t) для n от +300 до -400
Вывод: Была исследована работа подруливающего устройства с асинхронным электродвигателем и преобразователем частоты по типу неуправляемый выпрямитель - автономный инвертор».