

Лабораторные работы (не мои) / 3
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В. И. Ульянова (Ленина)
Кафедра САУ
отчет
по лабораторной работе №3
по дисциплине «Гребные электрические установки»
Тема: Исследование ГЭУ переменного тока с асинхронным гребным электродвигателем, полупроводниковым преобразователем и прямой передачей вращающего момента на винт.
Студенты гр. 7408 |
|
|
Преподаватель |
|
Малышев С.М. |
Санкт-Петербург
2020
Цель работы
В ходе данной лабораторной работы необходимо исследовать ГЭУ переменного тока с асинхронным гребным электродвигателем, полупроводниковым преобразователем и прямой передачей вращающего момента на винт.
Основные теоретические положения.
Типовая структурная электрическая схема ГЭУ переменного тока с асинхронным гребным электродвигателем (АГЭД), полупроводниковым преобразователем (ППЧ) и прямой передачей вращающего момента на винт изображена на рис. 1.
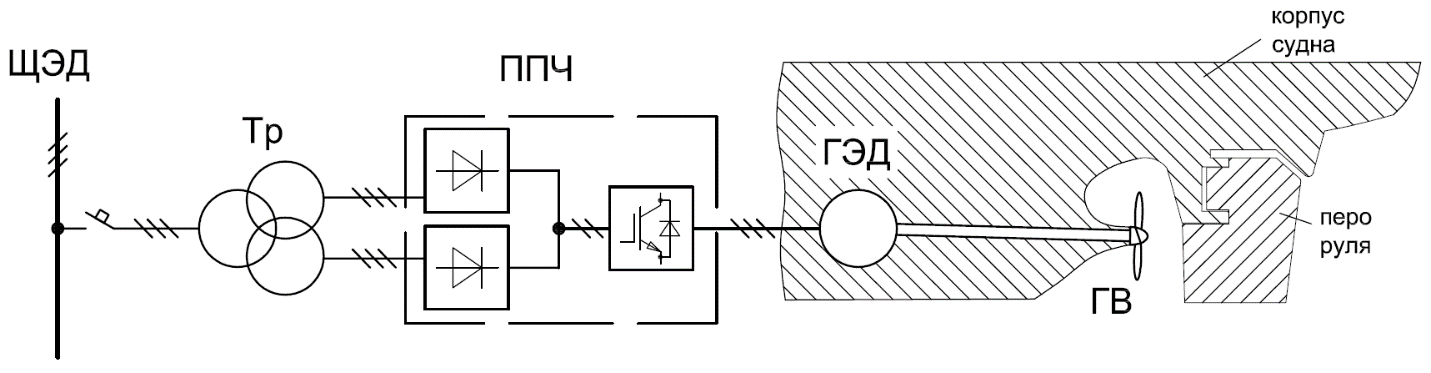
Рис. 1. Структурная электрическая схема ГЭУ переменного тока с асинхронным гребным электродвигателем, полупроводниковым преобразователем и прямой передачей вращающего момента на винт
ЩЭД – щит электродвижения; Тр – трёхобмоточный трансформатор;
ППЧ – полупроводниковый преобразователь частоты; ГЭД – гребной электродвигатель;
ГВ – гребной винт
В настоящее время наибольшее распространение на современных судах нашли ГЭУ с асинхронным ГЭД и ППЧ со звеном постоянного тока на базе автономных инверторов (АИ) и неуправляемых выпрямителей (НВ), винтом фиксированного шага.
В состав ГЭУ переменного тока входит:
щит электродвижения;
трёхобмоточный трансформатор;
преобразователь частоты;
гребной электродвигатель;
гребной винт.
Напряжение на щит электродвижения ЩЭД поступает от главного распределительного щита. Питание ГЭД осуществляется от ППЧ, который выполнен на базе двух неуправляемых выпрямителей, включенных последовательно и автономного инвертора. ПЧ получает питание от трехобмоточного трансформатора Тр. Применение трансформатора с двумя вторичными обмотками, включенными по схеме Y и Δ позволяет получить сдвиг напряжения на 30 электрических градусов, что повышает качество электрической энергии в судовой сети. Электрическая энергия преобразуется ГЭД в механическую энергию вращения гребного винта ГВ.
Принципиальная схема 12-типульсного преобразователя частоты представлена на рис. 2.
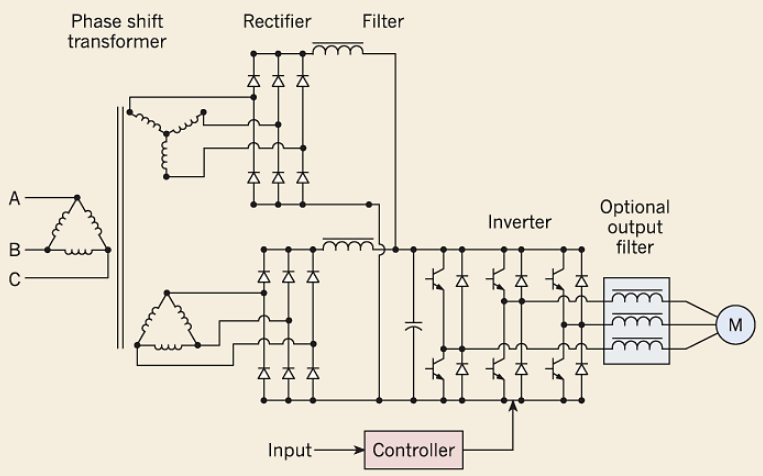
Рис. 2. Принципиальная схема 12-типульсного преобразователя частоты.
Механические характеристики гребного винта представлены на рис. 3.
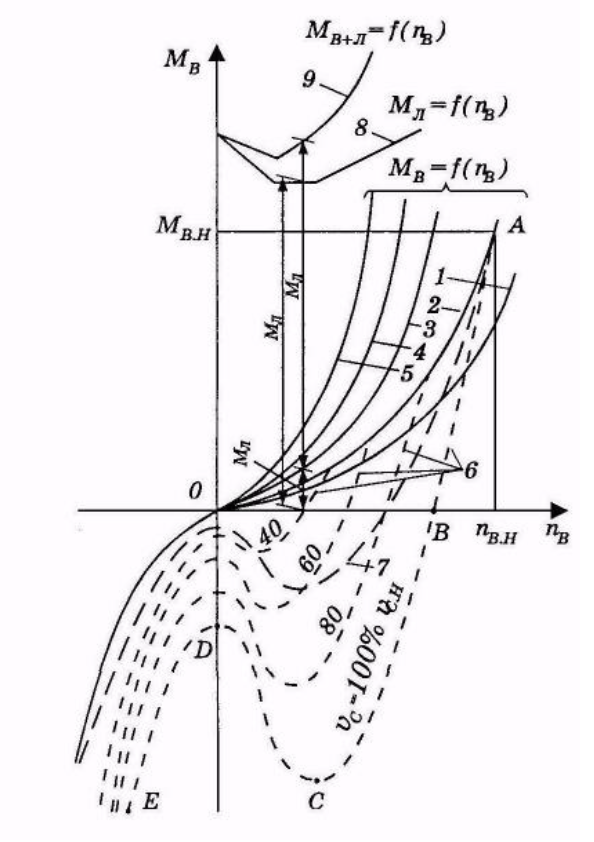
Рис. 3. Механические характеристики гребного винта
– при ходе в свободной воде с уменьшенной осадкой;
– при ходе в свободной воде с номинальной осадкой (с грузом);
– буксировочная (при ходе судна с взломом или во льдах);
– швартовая (при работающих винтах и неподвижном судне);
– ледовая (при вращении винта в мелком льду, шуге, «ледяной каше» и т.п., что увеличивает момент сопротивления);
– реверсивные характеристики;
– реальная реверсивная характеристика, учитывающая изменение скорости судна во время реверса.
Эти характеристики получают экспериментальным путем или расчетом по данным гребного винта. Для конкретного судна характеристики винта не являются постоянными, а могут в зависимости от осадки и условий плавания изменяться в диапазоне от характеристики хода в свободной воде при водоизмещении в порожнем состоянии до ледовой характеристики.
Основные параметры движительного комплекса определяют следующим образом. Для ледоколов моменты находят по швартовой характеристике 4 и ледовой характеристике 5, частоту вращения - по швартовой характеристике 4 и характеристике хода в свободной воде 2. Для буксиров эти параметры определяют по буксировочной характеристике 3. для остальных судов - ход в свободной воде (при номинальной осадке).
Реверсивная характеристика винта - это зависимость момента сопротивления от частоты вращения гребного винта при изменении направления его вращения на противоположное (во время реверса).
Расчетная реверсивная характеристика строится при неизменной скорости движения судна νс в первоначальном направлении, поскольку время реверса гребного винта, по крайней мере, на порядок меньше времени реверса судна.
Вид реверсивных характеристик гребного винта для разных значений первоначальной скорости судна νс приведен на рисунке 3 (кривые 6). Точка А соответствует ходу судна в свободной воде с номинальной скоростью nB.H и номинальной частоте вращения гребного винта nB.H. После прекращения подачи энергии к ГЭД частота его вращения быстро снижается до значения (0,6 - 0,75) n B.H, соответствующего шагу нулевого момента (точка В). За счет энергии набегающего потока гребной винт продолжает вращаться в ту же сторону и на участке ВСD сам развивает вращающий момент (отрицательный момент сопротивления), работая в режиме гидротурбины; максимальное значение момента (до 0,9 МBH) достигается при частоте вращения около 0,35 n B.H (точка С).
Для остановки винта необходимо, чтобы привод развивал тормозной момент (отрицательный вращающий момент), больший, чем вращающий момент винта. Под действием вращающего момента винт затормаживается (в точке В пВ = 0 при моменте около 0,4 МВН) и начинает разворачиваться в противоположном направлении (участок DЕ), создавая эффективное торможение движению судна в режиме гидравлического тормоза. Под действием вращающегося в противоположную сторону винта судно остановится и затем начнет разгон задним ходом.
Как правило, на заднем ходу частота вращения гребного винта при номинальном моменте меньше, чем на переднем ходу, из-за возрастания сопротивления движению судна.
Реальная реверсивная характеристика, учитывающая изменения скорости судна во время реверса, имеет вид 7 на рисунке 3.
При реверсе в швартовом режиме (νс = 0) исключается работа винта в режиме гидротурбины, и реверсирование происходит по симметричной кривой, проходящей через начало координат.
Диапазон изменения частоты вращения.
-nном < n ГЭД < + nном, где nном.ГЭД = nном.винта = 120 … 300 об/мин;
Законы управления.
В швартовном режиме (в диапазоне от точки 1 до рабочей точки 2, рис. 4) в связи с тем, что судно неподвижно, двигатель выходит на максимальную мощность, но частота вращения ГЭД не достигает заданного значения; поддерживается режим постоянства момента ГЭД MГЭД = const, продолжительность выхода ГЭД на номинальный момент/мощность около 30 секунд.
Выход на номинальную частоту вращения (в диапазоне от рабочей точки 2 до рабочей точки 3, рис. 4) поддерживается режим постоянства мощности ГЭД PГЭД = const, продолжительность около 5 минут.
После выхода ГЭД на номинальную частоту вращения (рабочая точка 3, рис. 4) поддерживается режим постоянства частоты вращения ГЭД nГЭД = const.
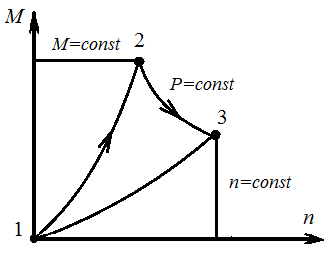
Рис.4. Механическая характеристика ГЭД в различных режимах эксплуатации судна.
В ходовых режимах поддерживается режим постоянства частоты вращения ГЭД nгэд = const (рис. 5)

Рис.5. Режим постоянства частоты вращения
При ходе судна во льдах поддерживается режим постоянства мощности Pгэд = const (рис. 6).
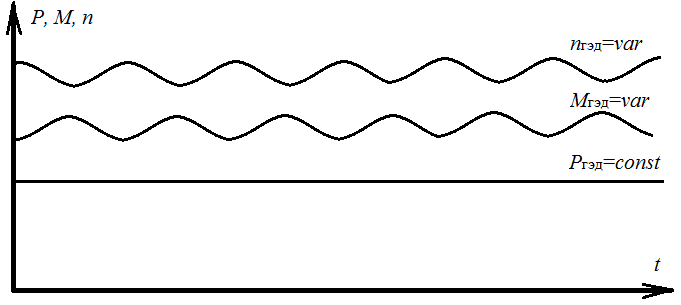
Рис.6. Режим постоянства мощности
Экспериментальные результаты и их обработка
Результаты эксперимента занесены в табл. 1.
Таблица 1. Экспериментальные результаты
№
|
nГЭД , мин-1 |
UГЭД ПУ, В |
f ПЧ, Гц |
I гЭД ПУ, А |
PГЭД, кВт |
МГЭД, Н*м |
1 |
-400 |
0 |
20 |
2,01 |
60 |
-1,5 |
2 |
-300 |
0 |
15 |
2,01 |
42 |
-1,3 |
3 |
-200 |
0 |
10 |
2 |
27 |
-1,28 |
4 |
-100 |
0 |
5 |
1,98 |
9 |
-0,8 |
5 |
0 |
0 |
0 |
1,96 |
0 |
-0,1 |
6 |
100 |
0 |
5 |
2 |
11 |
1,01 |
7 |
200 |
0 |
10 |
2 |
26 |
1,26 |
8 |
300 |
0 |
15 |
2,01 |
43 |
1,38 |
9 |
400 |
0 |
20 |
2,02 |
63 |
1,54 |
По данным таблицы 1 были построены статические характеристики M = f (n); n = f (P); n = f (f).
Рис. 7 Статическая характеристика M = f(n)
Рис. 8 Статическая характеристика n = f(P)
Рис.9 Статическая характеристика n = f (f).
Статическую характеристику U = f (f) не удалось построить из-за неисправности модели.
Характеристику переходного процесса реверса приведены на рисунках 10 и 11.
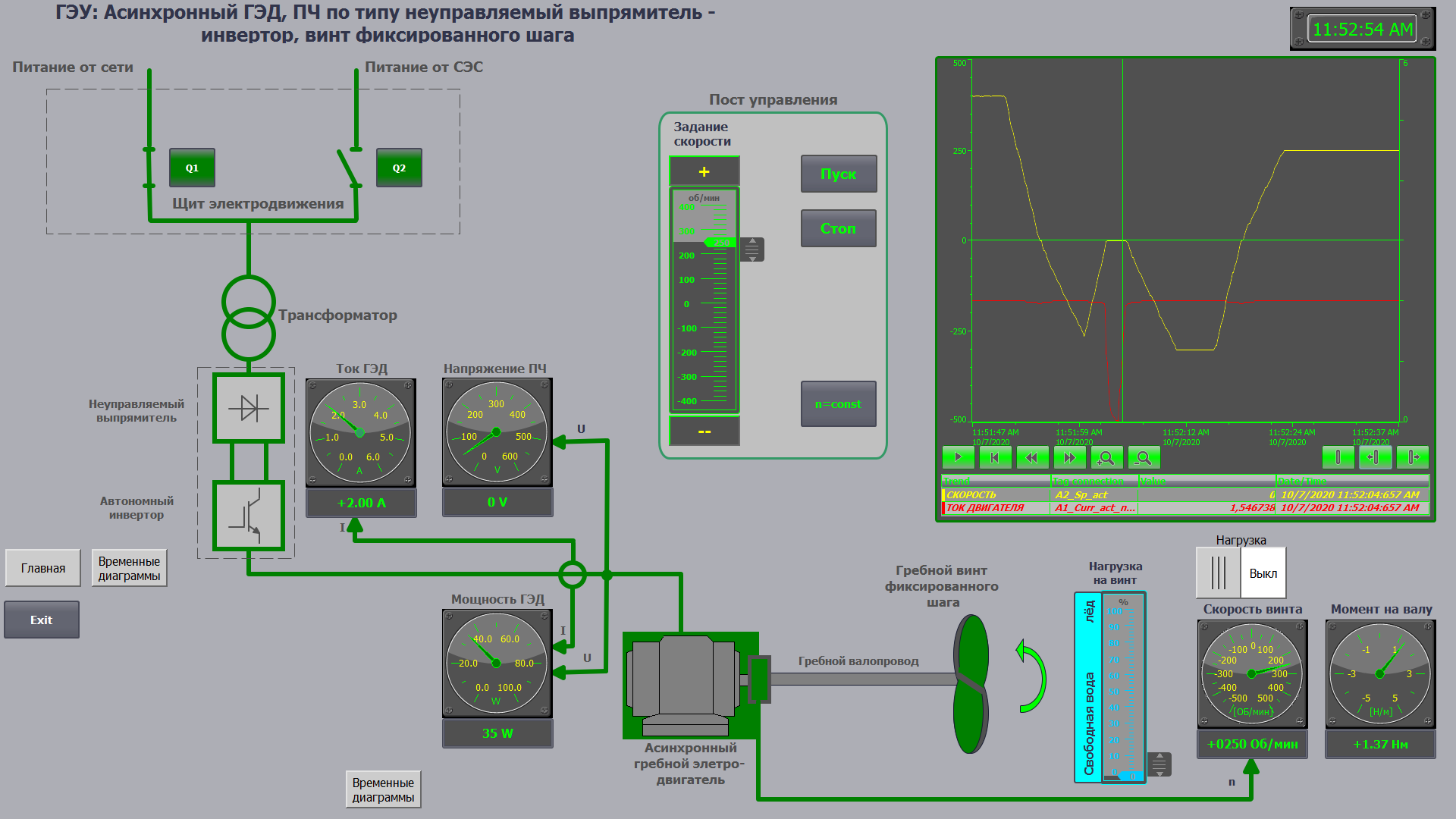
Рис. 10 Переходный процесс при реверсе от -300 до 250 об/мин
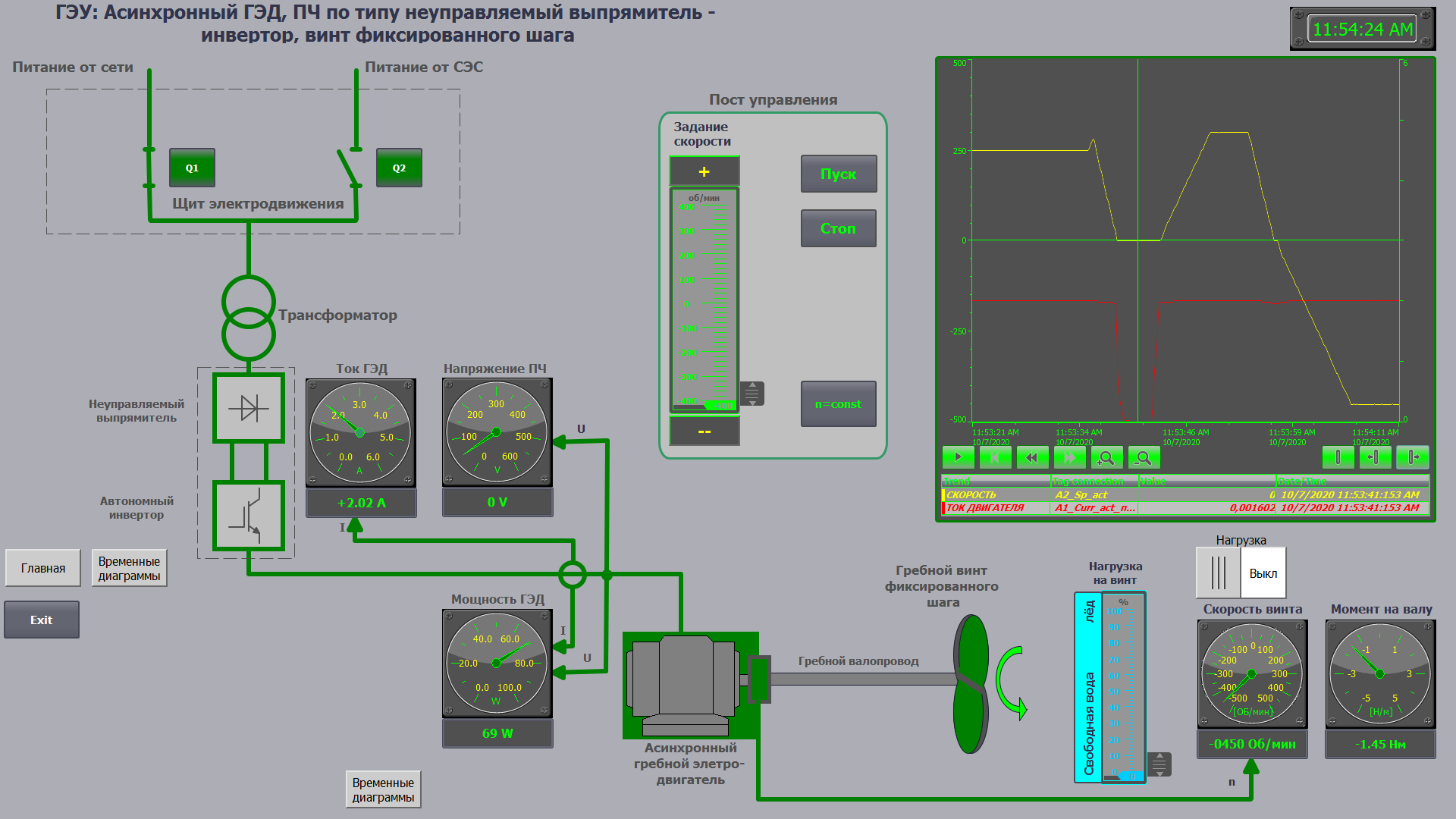
Рис. 11 Переходный процесс при реверсе от 300 до -400 об/мин
Выводы
В ходе данной работы была исследована ГЭУ переменного тока с асинхронным гребным электродвигателем, полупроводниковым преобразователем и прямой передачей вращающего момента на винт. Были построены статические характеристики M = f (n), n = f (P), n = f (f). По техническим причинам не получилось построить зависимость U = f (f), так как модель лабораторной работы некорректно работала. Были получены переходные процессы реверса при различных оборотах.