Лабораторные работы (не мои) / 2
.doc
МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра САУ
отчет
по лабораторной работе №2
по дисциплине «Гребные электрические установки»
Тема: Подруливающее устройство с асинхронным электродвигателем и преобразователем частоты по типу неуправляемый выпрямитель - автономный инвертор
Студент гр. 7408 |
|
|
Преподаватель |
|
Малышев С. М. |
Санкт-Петербург
2020
Цель работы.
Построение статических, переходных и реверсивных характеристик электродвигателя подруливающего устройства.
1. Основные теоретические положения.
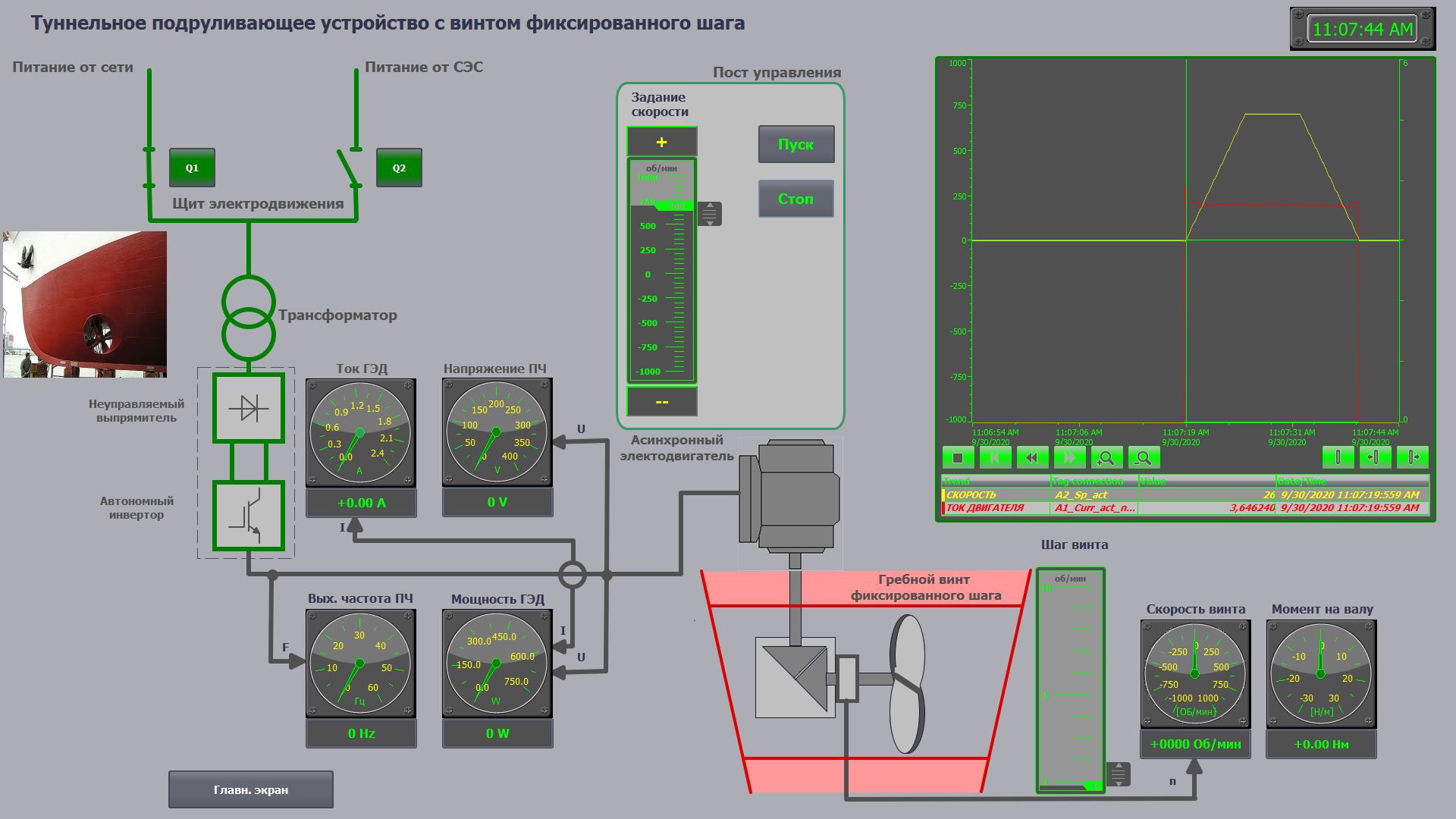
Типовая структурная электрическая схема электропривода туннельного подруливающего устройства приведена на рис. 1.
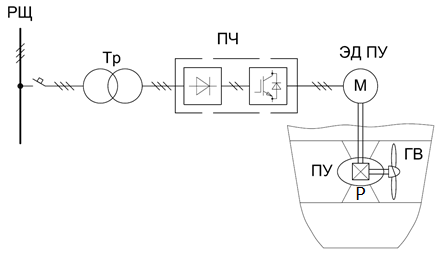
Рис. 1. Структурная электрическая схема электропривода туннельного подруливающего устройства
РЩ – распределительный щит; Тр – трансформатор; ПЧ – преобразователь частоты;
ЭД ПУ – электродвигатель подруливающего устройства; ПУ – подруливающее устройство; ГВ – гребной винт; Р – редуктор
Пример схемы расположения носового туннельного подруливающего устройства представлен на рис. 2.
Особенности:
Механическая передача вращающего момента на винт через понижающий редуктор (рис. 3).
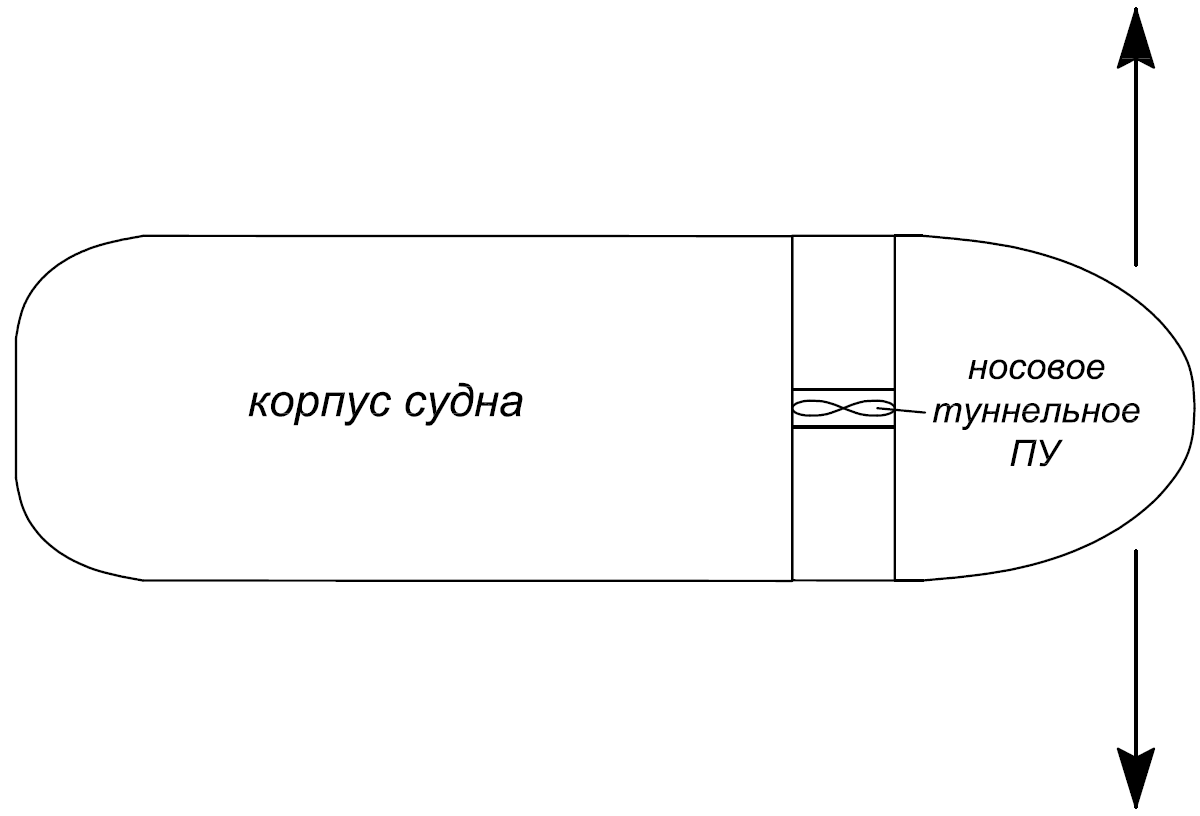
Рис. 2. Схема расположения носового туннельного подруливающего устройства
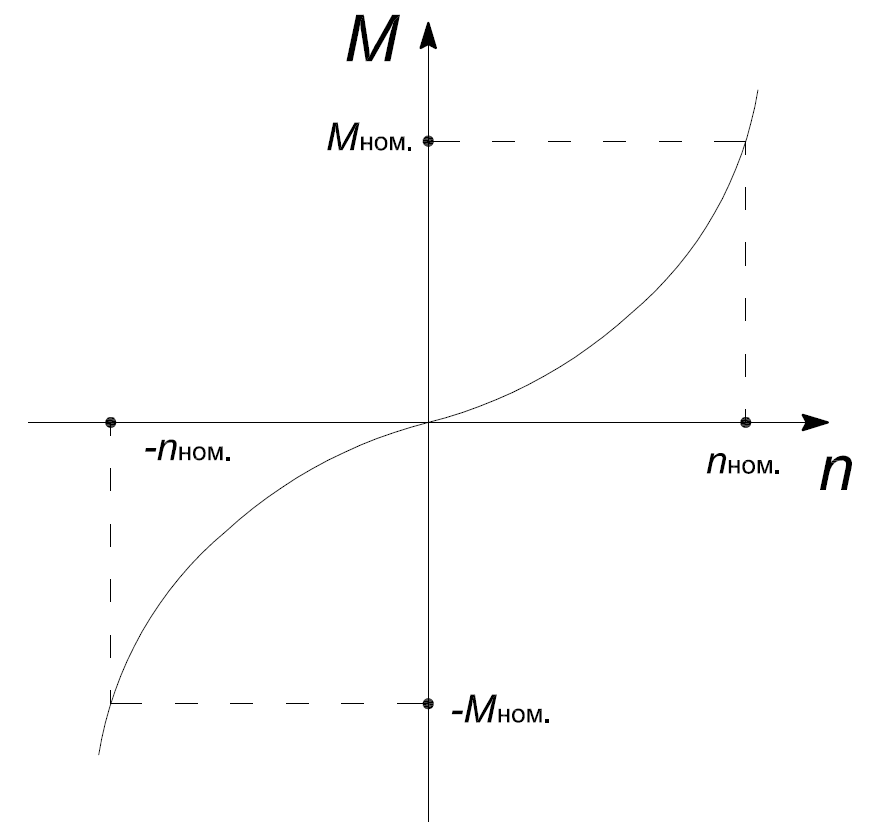
Рис. 3. Механическая характеристика гребного винта ПУ
Винт работает по швартовной реверсивной характеристике. Рекуперация электрической энергии в сеть – отсутствует, так как практически нет выбега судна и работа винта в режиме гидротурбины отсутствует при торможении.
Момент гребного винта подруливающего устройства равен моменту электродвигателя подруливающего устройства (МГВ = М ЭД ПУ).
nГЭД = 60 * f / p
где f – частота тока, Гц;
p – число пар полюсов ГЭД.
Диапазон изменения частоты вращения:
-nном < nЭД ПУ < + nном,
Номинальное значение частоты вращения ЭД ПУ в зависимости от типа ЭД может составлять:
nном.ЭД ПУ =~ 750 … 1500 об/мин;
Номинальное значение частоты вращения винта в зависимости от диаметра винта может составлять:
nном.винта =~ 300 … 750 об/мин
Законы управления:
Поддержание постоянства заданной частоты вращения.
Поскольку скорость разгона электродвигателя подруливающего устройства (ЭД ПУ) незначительная, а инерционность судна велика, отсутствует необходимость увеличения тока выше номинального для сокращения времени разгона ПУ. То есть, разгон происходит при номинальном токе или токе не превышающем 110% от номинальной величины. Следовательно, для уменьшения износа оборудования рационально системой управления ПЧ ограничивать пусковой ток и момент ЭД ПУ.
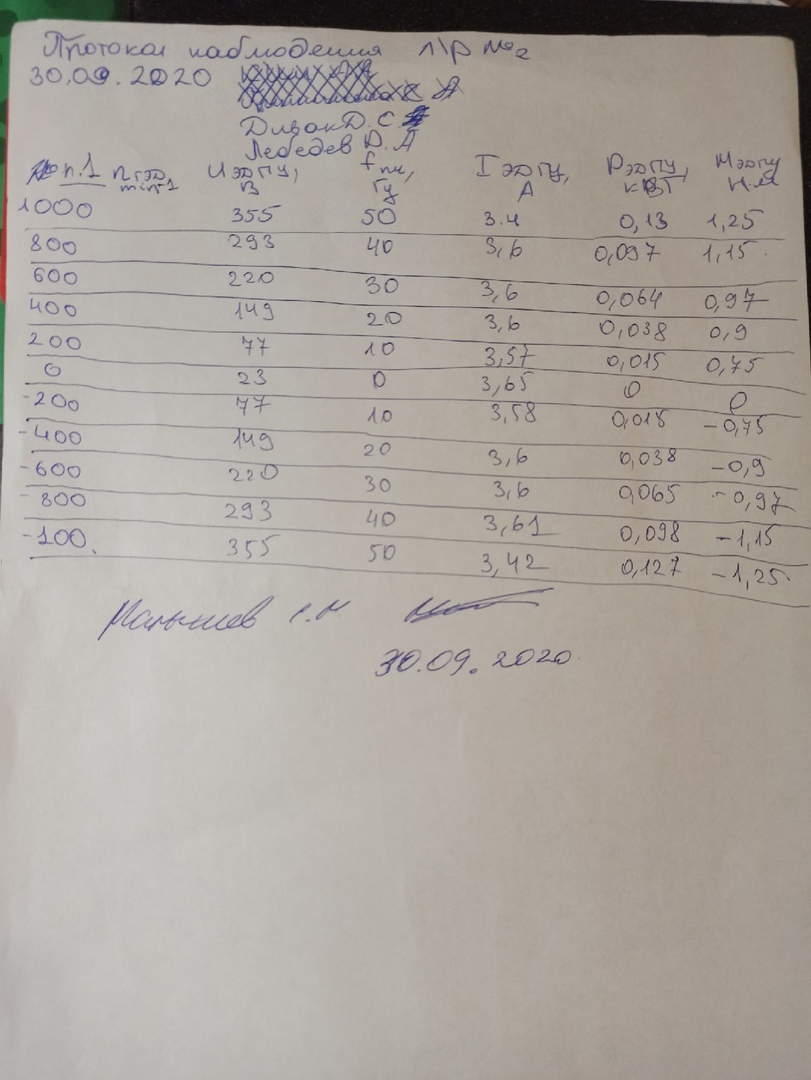
2. Экспериментальные результаты.
2.1. В ходе работы были сняты значения в диапазоне частоты вращения от 1000 до -1000 об/мин показания (по заданию преподавателя) установившихся значений момента, частоты вращения, мощности, тока, напряжения и частоты тока электропривода ПУ (табл. 1).
Таблица 1
№
|
nГЭД , мин-1 |
UЭД ПУ, В |
f ПЧ, Гц |
I ЭД ПУ, А |
PЭД ПУ, кВт |
МЭД ПУ, Н*м |
1 |
1000 |
355 |
50 |
3,4 |
0,13 |
1,25 |
2 |
800 |
293 |
40 |
3,6 |
0,097 |
1,15 |
Продолжение таблицы 1
№
|
nГЭД , мин-1 |
UЭД ПУ, В |
f ПЧ, Гц |
I ЭД ПУ, А |
PЭД ПУ, кВт |
МЭД ПУ, Н*м |
3 |
600 |
220 |
30 |
3,6 |
0,064 |
0,97 |
4 |
400 |
149 |
20 |
3,6 |
0,038 |
0,9 |
5 |
200 |
77 |
10 |
3,57 |
0,015 |
0,75 |
6 |
0 |
23 |
0 |
3,65 |
0 |
0 |
7 |
-200 |
77 |
10 |
3,58 |
0,015 |
-0,75 |
8 |
-400 |
149 |
20 |
3,6 |
0,038 |
-0,9 |
9 |
-600 |
220 |
30 |
3,6 |
0,065 |
-0,97 |
10 |
-800 |
293 |
40 |
3,61 |
0,098 |
-1,15 |
11 |
-1000 |
355 |
50 |
3,42 |
0,127 |
-1,25 |
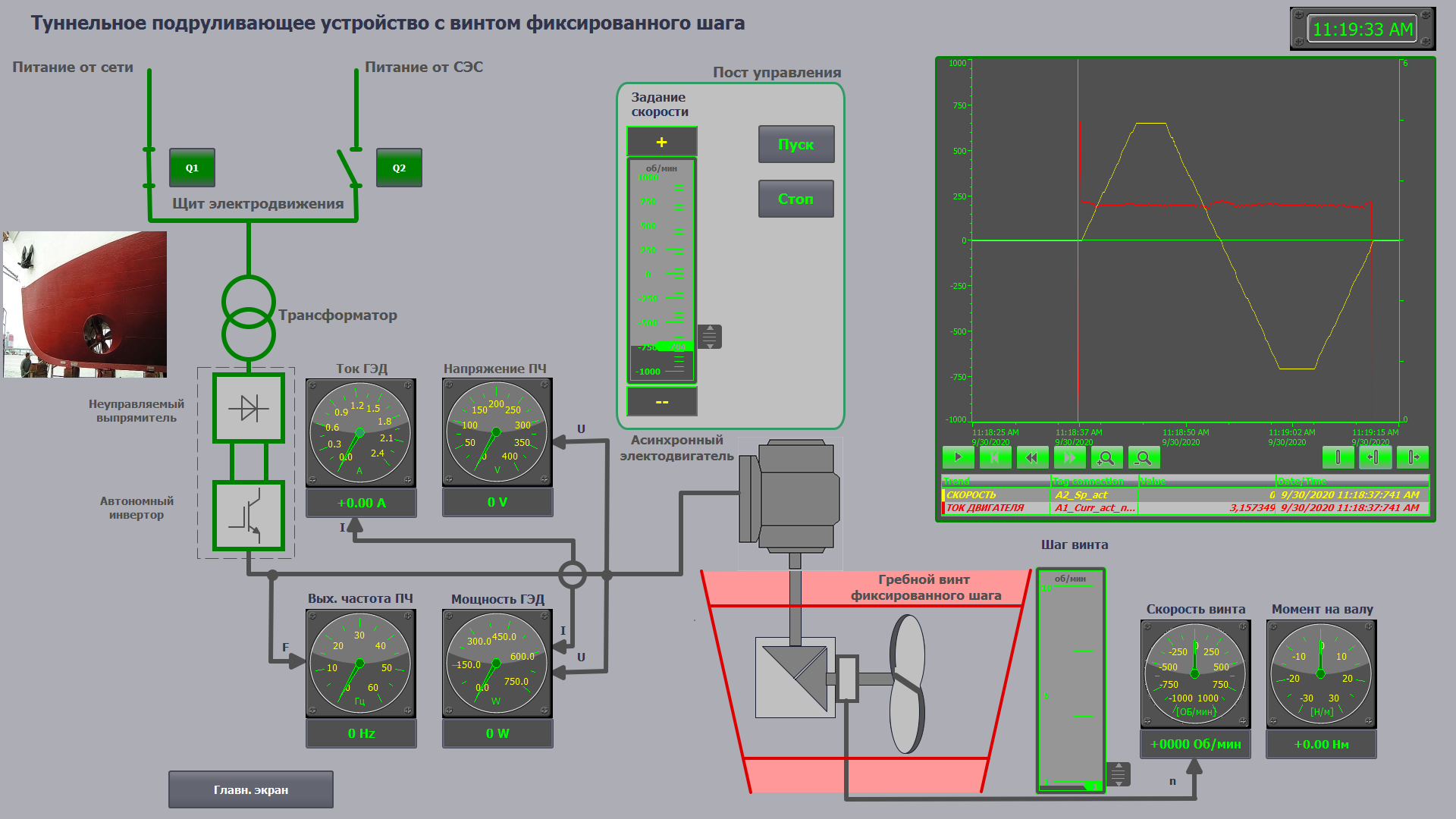
2.2. Были сняты 2 переходные характеристики пуска и останова ЭД ПУ до разной частоты вращения (рис. 5, а и б).
2.3. Были сняты 2 реверсивные характеристики ЭП (рис. 6, а и б).
3. Обработка результатов эксперимента.
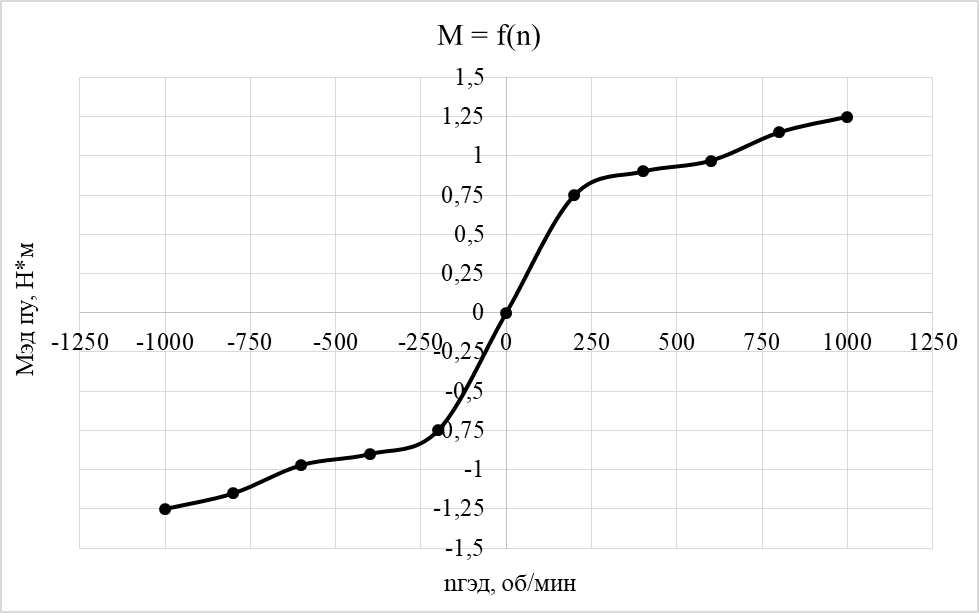
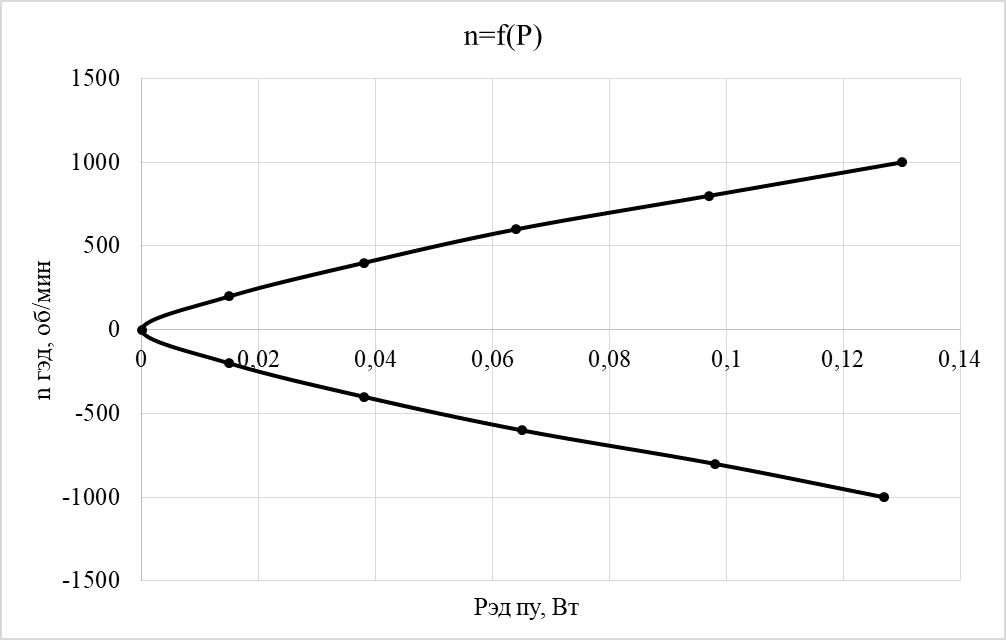
3.1. По данным табл. 1 были построены характеристики M = f (n);
U = f (f); n = f (P); n = f (f) (рис. 4, а, б, в и г соответственно).
а)
б)

в)
г)
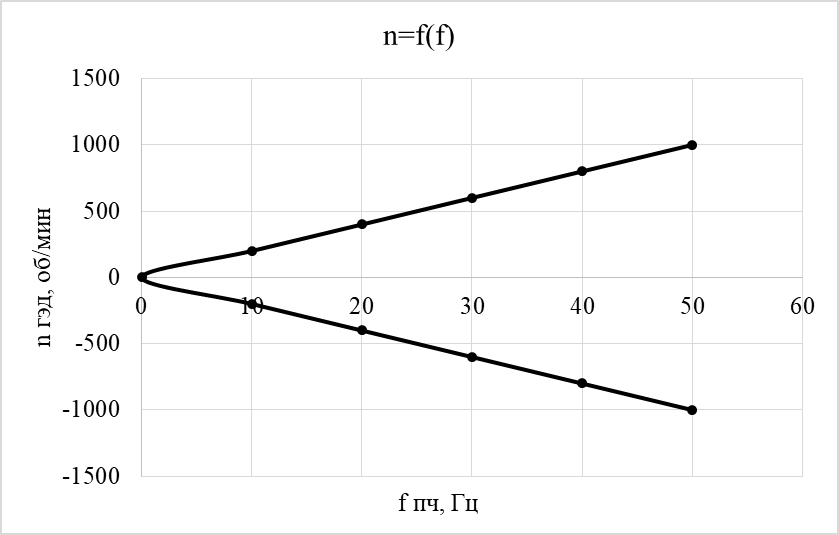
Рис. 4. Статические характеристики ЭД ПУ:
а – M = f (n); б – U = f (f); в – n = f (P); г – n = f (f).
3.2. На рис. 5, а и б приведены переходные характеристики пуска и останова ЭД ПУ до разных частот вращения.
а)
б)

Рис. 5. Переходные характеристики пуска и останова ЭД ПУ:
а) от 0 до 700 об/мин (tразг = 7 с, T = 4,4 с);
б) от 0 до –800 об/мин (tразг = 7,8 с, T = 4,9 c).
3.3. На рис. 6, а и б приведены реверсивные характеристики ЭП.
а)
б)
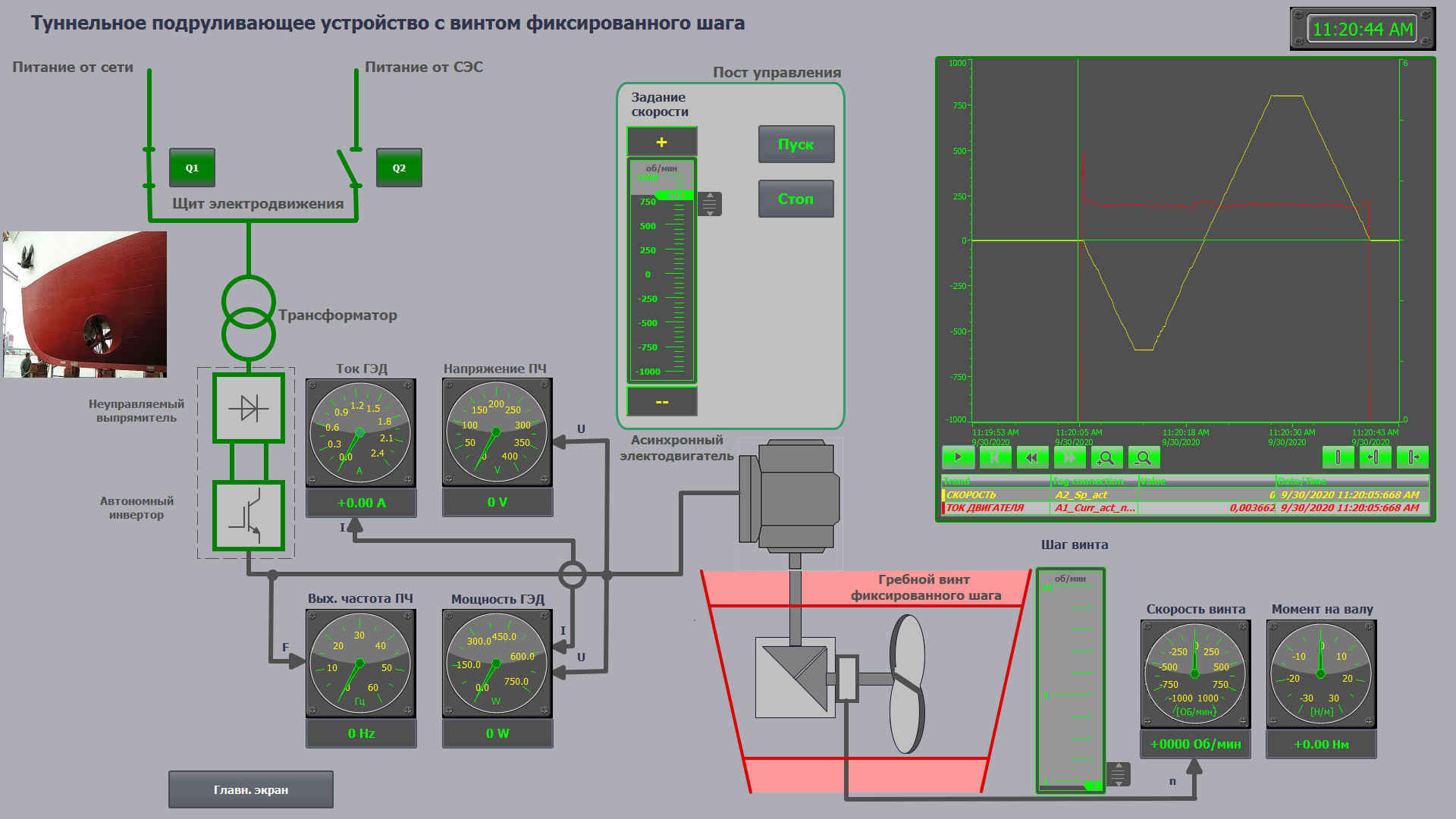
Рис. 6. Реверсивные характеристики ЭП:
а) от 650 до -700 об/мин;
б) -600 до 800 об/мин.
Выводы.
В ходе работы были построены статические, переходные и реверсивные характеристики электродвигателя подруливающего устройства. Как видно из графика, механическая характеристика n = f(M) не полностью совпадает с теоретической. Возможно, это связано с большой погрешностью в определении значений момента и скорости, так как при измерении они скакали, что затрудняло нахождение более точных значений. Из графиков переходных и реверсивных характеристик видно, что они больше напоминают прямую, чем экспоненту.
ПРОТОКОЛ