

algoritm-upravleniya-grebnym-elektroprivodom-universalnogo-atomnogo-ledokola-proekta-22220-95
.pdfV. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak
Control algorithm for electric propulsion drive of Project 22220 multi-purpose nuclear icebreaker
В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк
Филиал «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр», Санкт-Петербург
АЛГОРИТМ УПРАВЛЕНИЯ ГРЕБНЫМ ЭЛЕКТРОПРИВОДОМ УНИВЕРСАЛЬНОГО
АТОМНОГО ЛЕДОКОЛА ПРОЕКТА 22220
Объект и цель научной работы. Объектом работы является автоматизированный частотно-регулируемый гребной электропривод, входящий в состав системы электродвижения универсального атомного ледокола, находящегося в настоящее время в стадии строительства. Цель работы заключается в разработке функциональной схемы системы управления электроприводом, в основу которой положен алгоритм векторного управления, позволяющий практически реализовать совокупность жестких требований, предъявляемых к динамическим свойствам гребного электропривода.
Материалы и методы. Исходными материалами для статьи являются научно-техническая информация, представленная в трудах, посвященных теории электропривода, а также личные наработки и многолетний опыт, накопленные авторами в ходе проведения НИР и ОКР по разработке судовых систем электродвижения. Решение поставленной перед авторами задачи базируется на методах построения частотно-регулируемого гребного электропривода как замкнутой системы автоматического регулирования, содержащей несколько каналов управления, каждый из которых в свою очередь содержит по нескольку контуров, синтезированных на принципах последовательной коррекции.
Основные результаты. К основному результату, полученному в ходе работы над статьей, следует отнести разработку системы управления гребным частотно-регулируемым электроприводом на основе асинхронного двигателя с короткозамкнутым ротором мощностью 20 МВт, который по быстродействию и поддержанию точности задаваемых выходных координат не уступает лучшим электроприводам отечественного и зарубежного производства.
Заключение. Ценность практических результатов, полученных авторами статьи, заключается в создании системы управления гребным электроприводом в виде совокупности блоков, производящих математические операции как с контролируемыми параметрами, так и с ненаблюдаемыми физическими координатами. Эта система принята за основу в ходе разработки программного продукта, закладываемого в микропроцессорную систему управления гребной электрической установки универсального атомного ледокола проекта 22220, находящегося в постройке.
Ключевые слова: система электродвижения, гребной электропривод, статический преобразователь, асинхронный двигатель, векторное управление, преобразование координат.
Авторы заявляют об отсутствии возможных конфликтов интересов.
Для цитирования: Вершинин В.И., Махонин С.В., Паршиков В.А., Хомяк В.А. Алгоритм управления гребным электроприводом универсального атомного ледокола проекта 22220. Труды Крыловского государственного научного центра.
2017; 4(382): 95–102.
УДК 62-83:629.561.5 |
DOI: 10.24937/2542-2324-2017-4-382-95-102 |
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak
TSNII SET branch of Krylov State Research Centre, St. Petersburg, Russia
CONTROL ALGORITHM FOR ELECTRIC PROPULSION DRIVE OF PROJECT 22220 MULTI-PURPOSE NUCLEAR ICEBREAKER
Object and purpose of research. The object of this work is automated frequency-regulated electric propulsion drive being a part of the electric propulsion system of the multi-purpose nuclear icebreaker currently under construction. The purpose of this work is to develop the functional chart of electric drive control that must be based on the vector control algorithm that would make it possible to implement the totality of tough requirements stated to the dynamics of electric propulsion drive.
Materials and methods. This paper is based on scientific & technical information available in the publications dedicated to electric drive theory, as well as on personal findings and multi-year experience accumulated by the authors during R&D projects on development of marine electric propulsion systems. To accomplish their task, the authors were relying on the methods of designing a frequency-regulated electric propulsion drive as a closed automatic regulation system with several control channels, each of these channels, in its turn, consisting of several circuits synthesized as per the principles of successive correction.
ФГУП «Крыловский государственный научный центр» |
95 |

В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Алгоритм управления гребным электроприводом универсального атомного ледокола проекта 22220
Main results. The main result obtained in the work on this paper is development of the control system for frequencyregulated electric propulsion drive based on asynchronous motor with 20 MW squirrel-cage rotor that equals the best Russian and foreign electric drives in terms of response speed and accuracy of maintaining specified output coordinates.
Conclusion. The value of the practical results obtained by the authors is in development of the control system for electric propulsion drive as a totality of units performing mathematical operations with both controllable parameters and non-observable physical coordinates. This system is the basis for development of the software to be used in the micro- chip-based control system of electric propulsion plant for Project 22220 multi-purpose nuclear icebreaker currently under construction.
Key words: electric propulsion system, electric propulsion drive, static converter, asynchronous motor, vector control, conversion of coordinates.
Authors declare lack of the possible conflicts of interests.
For citations: Vershinin V., Makhonin S., Parshikov V., Khomyak V. Control algorithm for electric propulsion drive of Project 22220 multi-purpose nuclear icebreaker. Transactions of the Krylov State Research Centre. 2017; 4(382): 95–102 (in Russian).
УДК 62-83:629.561.5 |
DOI: 10.24937/2542-2324-2017-4-382-95-102 |
В настоящее время в ООО «Балтийский завод – Судостроение» производится строительство универсального атомного ледокола проекта 22220. Ледокол предназначается для круглогодичной проводки крупнотоннажных транспортных судов во льдах толщиной 2,9 м. Эксплуатация ледокола предполагается в западном и восточном районах Арктики. Ледокол имеет водоизмещение 33530/22540 т. Система электродвижения ледокола (СЭД) содержит три электропривода гребных винтов с распределением мощности 1:1:1. Суммарная пропульсивная мощность на валах СЭД составляет 60 МВт.
Функционирование СЭД ледокола характеризуется рядом специфических особенностей, таких как необходимость регулирования как частоты вращения гребных винтов в широком диапазоне, так и мощности, частыми изменениями направления вращения, скачкообразными набросами и сбросами статического момента нагрузки на гребных валах, большими перегрузками по моменту в режиме стоянки под током и в режиме фрезерования льда. Перечисленные выше особенности предопределили ряд специфических требований к СЭД ледокола. Эти требования в части функционирования были сформулированы на стадии, предшествующей техническому проектированию, следующим образом. Каждый электропривод СЭД ледокола должен обеспечивать:
вращение с частотой 2–4 об/мин при работе в режиме проворота вала;
дискретное (число ступеней равно 10) регулирование мощности на валу гребного винта в диапазоне от 2 до 20 МВт как при направлении вращения «ВПЕРЕД», так и при направлении вращения «НАЗАД»;
поддержание постоянства мощности на валу
гребного винта на каждой ступени с точностью ±20 кВт при частотах вращения в диапазоне от +/–50 до +/–80 об/мин и ±100 кВт при частотах вращения в диапазоне от +/–80
до +/–165 об/мин;
ограничение момента на валу гребного винта на
уровне 1,6 Мн при работе в режиме фрезерования льда (длительность режима не более 30 с);
ограничение момента на валу гребного винта на уровне 1,8 Мн при работе в режиме заклинивания (длительность режима не более 10 с);
электрическое торможение при реверсе в тече-
ние 10 с (в швартовном режиме) |
и в течение |
30 с (в режиме хода в свободной воде). |
|
Анализ вариантов возможного |
построения |
СЭД, проведенный в процессе технического проектирования, показал, что наиболее рациональной, в наибольшей степени отвечающей перечисленным выше требованиям, является структура СЭД, построенная на основе частотно-регулируемого асин-
дискретное (число ступеней равно 10) регулихронного электропривода с алгоритмом векторного рование частоты вращения гребного винта в диауправления. Суть этого алгоритма заключается
пазоне от 7,5 до 50 об/мин при направлении |
в том, что система управления электроприводом |
вращения «ВПЕРЕД» и от –7,5 до –50 об/мин |
оперирует не с реальными знакопеременными |
при направлении вращения «НАЗАД»; |
трехфазными токами и напряжениями исполни- |
поддержание постоянства частоты вращения |
тельного двигателя, а с их виртуальными аналога- |
гребного винта на каждой ступени с точностью |
ми. Последние исчисляются в двухфазной системе |
до 1 об/мин; |
координат, вращающейся с синхронной скоростью |
96 |
Труды Крыловского государственного научного центра, 4(382)/2017 |
|
|
|
|
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak |
||
|
Control algorithm for electric propulsion drive of Project 22220 multi-purpose nuclear icebreaker |
|||||
|
|
10 кВ |
T1 |
T2 |
T3 |
T4 |
P3 |
|
50 Гц |
||||
|
|
|
|
|
||
KA |
СУ ПЧ1 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
M ic ib ia |
|
|
R1 |
|
R3 |
M1 |
|
|
ПЧ1 |
ПЧ2 |
|
|
C1 |
|
|
|
R2 |
|
R4 |
|
|
|
|
|
|
|
M2 |
|
|
ДТa |
|
ДТa |
|
P3 |
M ia ib ic |
|
ДТb |
|
ДТb |
|
|
СУ ПЧ2 |
|
ДТc |
|
ДТc |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
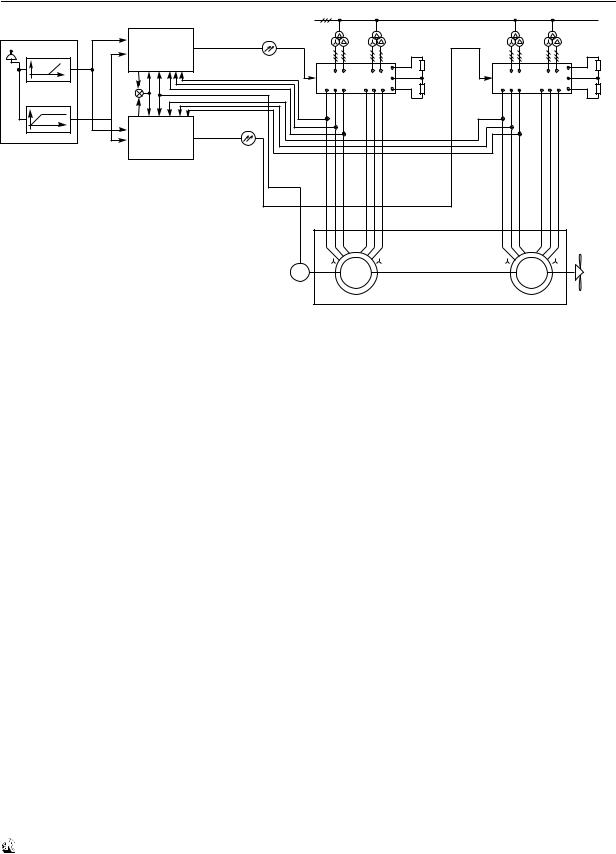
Рис. 1. Функциональная схема гребного электропривода
Fig. 1. Functional chart of electric propulsion drive
ГВ
АД1 |
АД2 |
ДЧВ |
ГЭД |
|
и сориентированной по вектору потокосцепления ротора двигателя. Введение двухфазной вращающейся системы координат приводит к тому, что виртуальные фазные токи и напряжения двигателя, вычисленные в этой системе координат, являются постоянными по знаку. При этом проекция обобщенного вектора тока статора двигателя на одну из осей (постоянная по знаку) является потокообразующей, а проекция этого вектора на вторую ось (тоже постоянная по знаку) является моментообразующей. Последнее обстоятельство позволяет производить синтез систем управления частотно-регулируемыми электроприводами, используя методы, применяемые при синтезировании многоконтоурных систем управления электроприводами постоянного тока с подчиненным регулированием (последовательной коррекцией) выходных параметров. То есть, используя алгоритм векторного управления, можно создавать частотно-регулируемые электроприводы переменного тока, по своим динамическим свойствам не уступающие лучшим электроприводам постоянного тока.
Как уже было отмечено выше, СЭД ледокола содержит три гребных винта с распределением мощности 1:1:1 и, соответственно, три гребных электропривода. Функциональная схема одного из них приведена на рис. 1.
В соответствии с функциональной схемой электропривод содержит:
а) ГЭД – гребной электродвигатель; б) АД1, АД2 – асинхронные машины, входящие
в состав ГЭД;
в) |
ПЧ1, ПЧ2 – преобразователи частоты; |
г) |
СУ ПЧ1, СУ ПЧ2 – системы управления преоб- |
д) |
разователей частоты; |
T1–Т4 – согласующие трансформаторы; |
е) ДЧВ – датчик частоты вращения ГЭД;
ж) ДТа, ДТb, ДТc – датчики фазных токов, проте-
|
кающих в статорных обмотках асинхронных |
е) |
машин АД1 и АД2; |
R1–R4 – тормозные резисторы; |
|
з) |
КА – командоаппарат, посредством которого |
|
задается режим работы электропривода. |
|
Отличительные особенностями гребного элек- |
тропривода, используемого в СЭД, таковы.
1.ГЭД представляет собой электромеханический агрегат, состоящий из двух асинхронных машин с короткозамкнутым ротором АД1 и АД2. Обе асинхронные машины имеют общий вал и на статоре каждой из них размещены по две трехфазных обмотки, магнитные оси которых разнесены на угол
в30 электрических градусов.
2.ГЭД, используемый в гребном электроприводе, получает питание от двух ПЧ. Оба ПЧ содержат по два силовых канала, каждый из которых нагружен на одну из четырех трехфазных обмоток, уложенных на статорах двух асинхронных машин, образующих ГЭД. Силовые каналы ПЧ содержат по два выпрямительных моста (собраны на полупроводниковых диодах по трехфазной двухполупериодной схеме выпрямления), выходы которых соединены последовательно, и трехуровневый автономный инвертор напряжения (собранный на транзисторных модулях типа JGBT). Кроме того,
ФГУП «Крыловский государственный научный центр» |
97 |

В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Алгоритм управления гребным электроприводом универсального атомного ледокола проекта 22220
звено постоянного тока каждого канала содержит транзисторный модуль, посредством которого происходит подключение тормозных резисторов, на которых рассеивается активная мощность, вырабатываемая асинхронными машинами в режимах электрического торможения.
3. Силовые каналы ПЧ получают питание от трехобмоточных согласующих трансформаторов, вторичные обмотки которых соединены одна в «звезду», вторая в «треугольник». Поскольку фазные напряжения вторичных обмоток согласующих трансформаторов, соединенных в «звезду и «треугольник», сдвинуты на угол 30 электрических градусов, то суммарное выпрямленное напряжение в звене постоянного тока каждого силового канала будет иметь 12-кратную пульсацию. В связи с тем, что обмотки согласующих трансформаторов имеют разные группы соединений ( /Υ- -0.75-11,75
упервого и /Υ- -11.25-10,25 у второго), то одноименные фазные напряжения вторичных обмоток
утрансформаторов сдвинуты на угол 15 электрических градусов. Поэтому частотный спектр суммарного тока, потребляемого обоими трансформаторами из судовой сети, будет соответствовать спектру тока, характерного для 24-тактной схемы выпрямления. То есть частотный спектр высших гармоник тока, потребляемого ПЧ из судовой сети, не будет содержать гармоники низкого порядка 5, 7, 11, 13, 17 и 19, что обеспечивает требуемую электромагнитную совместимость ПЧ с судовой ЭЭС.
4. Гребной электропривод представляет собой замкнутую систему автоматического регулирования, которая содержит:
канал поддержания постоянства потокосцепления роторов асинхронных машин, образующих ГЭД, на заданном уровне;
канал регулирования частоты вращения ГЭД
иподдержанияеепостоянстваназаданномуровне;
канал регулирования мощности на валу ГЭД
иподдержанияеепостоянстваназаданномуровне.
Каждый из каналов содержит два замкнутых контура (внешний и внутренний), причем внутренний контур подчинен внешнему, поскольку сигнал задания для внутреннего контура формирует регулятор внешнего контура.
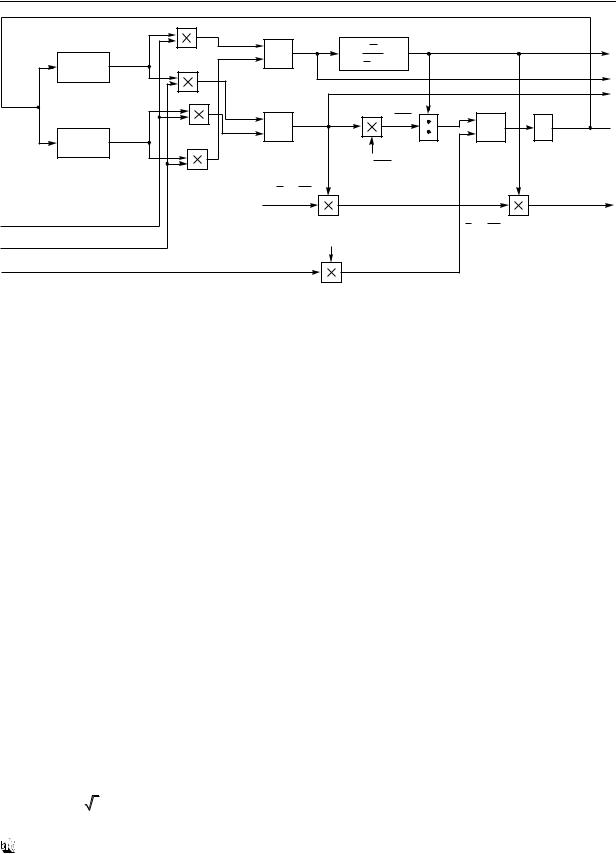
Алгоритмы работы ПЧ, обеспечивающие требуемые режимы функционирования гребного электропривода, реализуются в программном продукте, закладываемом в микропроцессорную систему управления ПЧ. Здесь же на функциональной схеме СУ ПЧ, приведенной на рис 2, в целях понимания принципа действия и работы ПЧ в составе гребного электропривода, программный продукт представлен аппаратными средствами в виде виртуальных блоков.
Требуемый режим работы электропривода задает КА, рукоятка управления которого, перемещаясь в направлении «ВПЕРЕД» и в направлении «НАЗАД», может занимать двадцать положений. При этом канал поддержания потокосцепления ротора функционирует во всех положениях рукоятки
|
|
|
ФП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P2 |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P2 P PP |
OP |
ВР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
3 |
P3 |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ЗИ1 |
C1 |
ПУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
РC |
ОМ |
|
|
|
|
РТ1 |
|
|
|
|
|
|
|
|
|
ЗИ2 |
|
3 C2 M3 C7 |
M3 |
|
i |
|
C4 |
|
|
|
|
|
|
|
|
|||
|
|
|
q3 |
|
|
|
|
|
|
|
|
|
|||||||
3 |
|
|
|
макс |
ВТ |
|
i |
|
|
U |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
q3 |
|
3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
iq |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
id3 |
БВН |
U 3 |
БПК |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
макс3 C3 РП id3 |
|
РТ2 |
2 в 3 |
U |
a3 |
|
||||||||
|
|
|
|
|
C5 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
Ub3 |
в ПЧ |
|||||||
|
|
|
|
|
ЗП |
|
|
|
|
|
|
|
|
|
|
|
Uc3 |
|
БУ |
|
|
|
|
|
макс |
id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
i |
|
|
|
ia |
|
|
|
ia |
|
|
|
|
|
|
|
макс |
|
|
|
|
БПК |
|
|
|
|
|||
|
|
|
|
|
|
|
id |
|
БВНК |
|
|
|
ib |
|
|
|
ib |
||
|
|
|
|
|
|
|
M |
|
|
|
i |
|
3 в 2 |
|
ic |
|
|
|
ic |
|
|
|
|
|
|
|
iq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Функциональная схема системы управления преобразователя частоты
Fig. 2. Functional chart of control system for frequency converter
98 |
Труды Крыловского государственного научного центра, 4(382)/2017 |
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak
Control algorithm for electric propulsion drive of Project 22220 multi-purpose nuclear icebreaker
|
cos Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i cos Y |
+ |
|
id |
|
Lm |
|
макс |
|
|
|
|
|
макс |
|
|
i sin Y |
|
|
R2 |
|
|
|
|
|
|
|
|||||
Y |
|
|
L2 |
|
|
|
|
|
|
|
|
|
||||
|
+ |
id |
p |
1 |
|
|
|
|
|
|
|
|
||||
сos |
cos Y |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
R2 |
|
|
|
|
|
|
|
|
i |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|sin Y |
i cos Y |
|
|
|
|
|
iq |
Lm |
макс |
S |
|
|
|
|
|
|
i |
+ |
|
iq |
|
|
L2 |
|
+ |
|
0 |
Y |
Y |
|||
Y |
i sin Y |
+ |
|
|
|
|
|
|
|
+ |
|
|
|
|||
sin |
|sin Y |
|
|
|
|
|
|
|
|
|
pn |
|
|
|
|
|
|
|
|
|
|
|
|
Lm |
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
L2 |
|
|
|
|
|
|
|
|
|
|
|
3 pn |
Lm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iq |
|
|
|
|
|
|
|
макс |
|
|
||
|
|
|
|
2 |
L2 |
|
|
|
|
|
|
|
|
|
|
M |
i |
|
|
|
|
|
|
|
|
|
|
3 |
|
Lm |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
2 pn |
L2 |
iq |
|
|
|
|
|
|
|
|
pn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
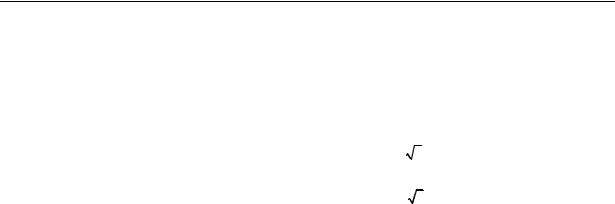
Рис. 3. Структурная схема блока вычисления ненаблюдаемых координат |
|
|
|
|
|
|
||||||||||
Fig. 3. Generalized layout of calculation unit for non-observable coordinates
управления. Канал регулирования частоты вращения ГЭД функционирует в режимах, в которых рукоятка управления КА находится в первых десяти положениях по направлениям «ВПЕРЕД» и «НАЗАД». Соответственно, канал регулирования мощности на валу ГЭД функционирует в режимах, в которых рукоятка управления КА находится следующих десяти положениях.
Поскольку СУ ПЧ1 и СУ ПЧ2 обоих преобразователей имеют идентичные схемотехнические решения, то работу электропривода, в целях простоты ее понимания, можно рассмотреть на примере одного ПЧ и одной из двух асинхронных машин, образующих ГЭД.
Как уже отмечалось выше, канал поддержания постоянства потокосцепления ротора функционирует во всех положениях рукоятки управления КА. В каждый квантованный момент времени сигналы, пропорциональные токам iа, ib, iс, протекающим в трехфазной обмотке статора асинхронной электрической машины, и, снимаемые с датчиков тока ДТа, ДТb, ДТс, поступают на входные порты блока преобразования трехфазной системы координат в двухфазную систему (БПК 3 в 2). Этот блок осуществляет математические операции по вычислению проекций (iα, iβ) обобщенного вектора тока обмотки статора на оси неподвижной относительно статора системы координат α, β. Расчет производится в соответствии с выражениями
iα = iа; iβ =1/ 3(ib -iC ). |
(1) |
Сигналы, пропорциональные вычисленным значениям iα, iβ, поступают на входные порты блока вычисления ненаблюдаемых координат (БВНК). В этот же блок с ДЧВ поступает информация о частоте вращения ГЭД. В блоке БВНК производятся математические операции по вычислению:
модуля вектора потокосцепления (ψмакс) ротора асинхронной машины;
электромагнитного момента (М), развиваемого асинхронной машиной;
угла поворота (Υ) системы координат d, q, вра-
щающейся с синхронной частотой вращения ω0 и ось d которой совмещена с модулем вектора потокосцепления ротора ψмакс;
проекций (id, iq) обобщенного вектора тока статоранаосиd, q вращающейсясистемыкоординат. При использовании алгоритма векторного управ-
ления проекция id обобщенного вектора тока статора является потокообразующей, а проекция iq – моментообразующей.
Структура математических операций, производимых в БВНК, их характер и последовательность показаны на рис. 3. Приводятся следующие обозначения параметров асинхронной машины:
Lm – взаимная индуктивность одноименных фаз статора и ротора;
L2 – индуктивность рассеяния фазы ротора; R2 – активное сопротивление фазы ротора; pn – число пар полюсов;
Р – оператор Лапласа;
S – абсолютное скольжение.
ФГУП «Крыловский государственный научный центр» |
99 |
В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Алгоритм управления гребным электроприводом универсального атомного ледокола проекта 22220
С выхода блока БВНК сигнал, пропорциональный вычисленному (фактическому) значению модуля вектора потокосцепления ротора ψмакс, поступает на отрицательный порт сумматора С3, на положительный порт которого подается сигнал, пропорциональный задаваемому значению модуля вектора потокосцепления ψмаксЗ. Величина этого сигнала формируется задатчиком потокосцепления (ЗП). Разность между задаваемым и вычисленным (фактическим) значениями модуля вектора потокосцепления ротора с выхода сумматора С3 поступает на вход пропорционально-интегрального регулятора потока (РП). Регулятор потока формирует сигнал, величина которого пропорциональна задаваемому (требуемому) значению величины потокообразующей проекции idз обобщенного вектора тока обмотки статора. Этот сигнал поступает на положительный порт сумматора С5, на отрицательный порт которого из блока БВНК приходит сигнал, пропорциональный вычисленному (фактическому) значению проекции id. Разность между задаваемым (требующимся) и вычисленным (фактическим) значениями проекций тока поступает на вход пропор- ционально-интегрального регулятора РТ2. Этот регулятор в свою очередь формирует сигнал, величина которого пропорциональна задаваемому (требуемому) значению проекции UdЗ обобщенного вектора выходного напряжения силового канала ПЧ на ось d вращающейся системы координат. Сформированный таким образом сигнал поступает на вход блок вычисления напряжений (БВН). На другие входы этого блока поступают сигналы, пропорциональные:
задаваемому (требуемому) значению проекции
UqЗ обобщенного вектора выходного напряжения преобразовательного канала ПЧ (формируется каналами регулирования частоты вращения и мощности);
фазной системы координат в трехфазную (БП 2 в 3). Этот блок производит математические операции по вычислению задаваемых (требуемых) величин проекций UаЗ, UbЗ, UcЗ обобщенного вектора выходного напряжения преобразовательного канала на оси А, B, C неподвижной трехфазной системы координат.
UаЗ =UαЗ;
UbЗ = - |
1 |
UαЗ + |
3 |
UβЗ; |
|
||||
2 |
2 |
|
|||||||
|
|
|
|
|
|
||||
UCЗ = - |
|
1 |
UαЗ - |
|
3 |
UβЗ. |
(3) |
||
2 |
|
||||||||
|
|
2 |
|
|
|
||||
Сигналы, пропорциональные вычисленным значениям этих проекций, поступают в блок БУ, в котором они используются для создания трехфазного широтно-импульсного модуляционного напряжения, формирующего импульсы управления транзисторными ключами автономных инверторов напряжения в преобразовательных каналах ПЧ.
Канал управления частотой вращения ГЭД функционирует следующим образом. При переводе рукоятки управления КА в одно из десяти первых положений сигнал задания частоты вращения ГЭД ωЗ, изменяясь скачком, поступает на вход задатчика интенсивности ЗИ2. Последний трансформирует сигнал задания ωЗ, изменившийся скачком, в сигнал задания ωЗ, изменяющийся плавно, с необходимым темпом. Сигнал задания частоты вращения с выхода ЗИ2 поступает на положительный вход сумматора С2. На отрицательный вход сумматора от ДЧВ приходит сигнал ω, величина которого пропорциональна фактическому значению частоты вращения ГЭД. Разность между задаваемым и фактическим значениями частот вращения с выхода сумматора С2 поступает на вход пропорционального регулятора скорости РС, который формирует сигнал задания электро-
углу поворота Υ вращающейся системы коормагнитного момента МЗ, необходимого для сведения
динат d, q относительно неподвижной системы координат α, β.
В блоке БВН производятся математические операции по вычислению задаваемых (требуемых) значений проекций UαЗ, UβЗ обобщенного вектора выходного напряжения преобразовательного канала ПЧ на оси α, β неподвижной двухфазной системы координат.
UαЗ =UdЗ cos γ -UqЗ sin γ; |
|
UβЗ =UdЗ sin γ +UqЗ cos γ. |
(2) |
Сигналы, сформированные в блоке БВН, приходят на входные порты блока преобразования двух-
этой разности к нулю. Сигнал задания электромагнитного момента, проходя через сумматор С7 (о назначении его будет сказано ниже) и ограничитель величины момента ОМ, поступает на вход блока вычислителя тока ВТ. Блок ОМ предназначен для ограничения величины задания МЗ электромагнитного момента на уровне, исключающем поломки в элементах и узлах механической части гребного электропривода. На второй вход блока ВТ приходит информация о величине модуля обобщенного вектора потокосцепления ротора ψмакс. Блок ВТ производит математические операции по вычислению задаваемой (требуемой) величине моментообразующей
100 |
Труды Крыловского государственного научного центра, 4(382)/2017 |

V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak Control algorithm for electric propulsion drive of Project 22220 multi-purpose nuclear icebreaker
проекции iqз обобщенного вектора тока обмотки статора на ось q вращающейся системы координат d, q.
iqз = |
2МзL2 |
(4) |
3РпLmΨмакс . |
Вычисленное значение задаваемой величины этой проекции поступает на положительный вход сумматора С4, на отрицательный вход которого из блока БВНК поступает информация о фактическом ее значении (iq). Разность между задаваемым (требуемым) и фактическим значениями проекции обобщенного вектора тока обмотки статора поступает на вход пропорционально-интегрального регулятора тока РТ1. Регулятор тока РТ1 в свою очередь на основании полученной разности формирует сигнал на задание требуемой величины проекции Uqз обобщенного вектора напряжения на выходе преобразовательного канала ПЧ на ось q вращающейся системы координат d, q. Сформированный таким образом сигнал поступает на вход блока вычисления напряжений (БВН). На другие входы этого блока поступают сигналы пропорциональные:
Разность между задаваемым значением мощности и ее фактическим значением с выхода сумматора поступает на пропорциональноинтегральный регулятор мощности РР. Последний вырабатывает сигнал, который через блок ограничения мощности ОР и пороговое устройство ПУ поступает на положительный вход сумматора С2, где суммируется с сигналом, поступающим с выхода ЗИ2. Сумма этих двух сигналов является сигналом задания частоты вращения ГЭД, при которой обеспечивается заданное значение мощности на его валу.
ПУ пропускает сигнал обратной связи на сумматор С2 только в режиме регулирования мощности, когда рукоятка КА находится в положениях,
вкоторых сигнал, поступающий на сигнальный вход ПУ, отличен от нуля. А это происходит только
втех случаях, когда рукоятка командоаппарата находится в одном из положений от 11 до 20.
Выравнивание электромагнитных моментов, развиваемых асинхронными машинами, образующими ГЭД, производится следующим образом. Сигналы, величины которых пропорциональны
задаваемому значению проекции UdЗ обобщенэлектромагнитным моментам этих машин, с вы-
ного вектора выходного напряжения преобраходов блоков БВНК поступают на входы суммазовательного канала ПЧ (формируется каналом тора С1 (рис. 1), в котором они сравниваются по
поддержания постоянства потокосцепления ро- |
величине. |
Полученная разность |
с выхода сумма- |
тора на заданном уровне); |
тора С1 |
поступает на входы |
сумматоров С7 |
углу поворота Υ вращающейся системы коор- (рис. 2), в которых, в зависимости от знака, она
динат d, q относительно неподвижной системы координат α, β.
О назначении и вычислительных процессах, протекающих в блоке БВН, а также блоках БП 2 в 3 и БУ было сказано выше.
Функционирование канала регулирования мощности ГЭД и поддержания ее на заданном уровне происходит следующим образом. При переводе рукоятки КА в любое из десяти следующих положений по направлениям «ВПЕРЕД» или «НАЗАД» сигнал, величина которого пропорциональна задаваемой мощности, изменяясь скачкообразно, поступает на вход блока задатчика интенсивности ЗИ1. В этом блоке происходит преобразование сигнала задания, изменяющегося скачкообразно,
всигнал задания, изменяющийся плавно. Преобра-
зованный сигнал задания мощности РЗ приходит на положительный вход сумматора С1, на отрицательный вход этого сумматора поступает информация о фактической мощности. Величина последней определяется в блоке вычисления мощности ВР,
вкоторый приходит информация о моменте и частоте вращения ГЭД.
либо прибавляется к сигналу задания момента МЗ, либо вычитается из этого сигнала. В соответствии с этим электромагнитные моменты, развиваемые асинхронными машинами АД1 и АД2, начинают изменяться до тех пор, пока не сравняются по величине.
В настоящее время гребные электроприводы, входящие в состав СЭД ледокола, уже изготовлены в филиале «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр», прошли стендовые испытания и отправлены в ООО «Балтийский завод – Судостроение», осуществляющее строительство ледокола, для установки на ледокол и проведения швартовых и ходовых испытаний.
Библиографический список
References
1.Рудаков В.В., Столяров И.М., Дартау В.А. Асин-
хронные электроприводы с векторным управлением.
Л.: Энергоатомиздат, 1987. [V. Rudakov, I. Stolyarov,
V. Dartau. Asynchronous electric drives with vector control. Leningrad: Energoatomizdat, 1987. (in Russian)].
ФГУП «Крыловский государственный научный центр» |
101 |

В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Алгоритм управления гребным электроприводом универсального атомного ледокола проекта 22220
2.Соколовский Г.Г. Электроприводы переменного тока Хомяк Валентин Алексеевич, начальник отдела – главный
с частотным управлением. М.: Академия, 2007. [G. Sokolovsky. AC drives with frequency control. Moscow: Akademiya, 2007. (in Russian)].
Сведения об авторах
Вершинин Виктор Иванович, инженер 1 категории НИО-12 филиала «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр». Адрес: 196128, Россия, Санкт-Петербург, Благодатная ул., д. 6. Телефон: 8 (812) 748-52-38; e-mail: krylov@krylov.spb.ru.
Махонин Сергей Васильевич, начальник сектора – заме-
ститель начальника отдела НИО-12 филиала «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр». Адрес: 196128, Россия, Санкт-Петербург, Благо-
датная ул., д. 6. Телефон: 8 (812) 748-52-44; e-mail: krylov@krylov.spb.ru.
Паршиков Владимир Алексеевич, начальник отдела НИО-12 филиала «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр». Адрес: 196128, Россия, Санкт-Петербург, Благодатная ул.,
д. 6. Телефон: 8 (812) 748-52-43; e-mail: krylov@krylov.spb.ru.
конструктор ЕЭЭС и ГЕУ филиала «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр». Адрес: 196128, Россия, Санкт-Петербург, Благодатная ул., д. 6.
Телефон: 8 (812) 748-52-30; e-mail: krylov@krylov.spb.ru.
About the authors
Vershinin, Viktor I., 1st Category Engineer, TSNII SET branch of KSRC, address: 6, Blagodatnaya st., St. Petersburg, Russia, post code 196128. Tel.: 8 (812) 748-52-38; e-mail: krylov@krylov.spb.ru.
Makhonin, Sergey V., Head of Sector – Deputy Head of Department, TSNII SET branch of KSRC, address: 6, Blagodatnaya st., St. Petersburg, Russia, post code 196128. Tel.: 8 (812) 748-52-44; e-mail: krylov@krylov.spb.ru.
Parshikov, Vladimir A., Head of Department, TSNII SET branch of KSRC, address: 6, Blagodatnaya st., St. Petersburg, Russia, post code 196128. Tel.: 8 (812) 748-52-43; e-mail: krylov@krylov.spb.ru.
Khomyak, Valentin A., Head of Department – Chief Designer of IEPS and Electric Propulsion Plants, TSNII SET branch of KSRC, address: 6, Blagodatnaya st., St. Petersburg, Russia, post code 196128. Tel.: 8 (812) 748-52-30; e-mail: krylov@krylov.spb.ru.
Поступила / Received: 28.03.17 Принята в печать / Accepted: 30.04.17 © Коллектив авторов, 2017
102 |
Труды Крыловского государственного научного центра, 4(382)/2017 |