

Самостоятельная работа №3 "Построение и исследование адаптивной системы с параметрической настройкой для двухмассового упругого электромеханического объекта третьего порядка"
Целью выполнения данной работы является:
-
овладение навыками исследования адаптивной системы;
-
исследование эффективности адаптивного управления при изменении параметров объекта;
-
исследование возможностей адаптивного управления по стабилизации объекта управления;
Для выполнения задания по самостоятельной работе достаточно внимательно изучить методику построения и расчета прямых адаптивно-модальных систем автоматического управления с параметрической настройкой, изложенную в главе 7 лекций по дисциплине "Методы проектирования систем управления многостепенными механическими объектами с упругими деформациями", и, ледуя материалу главы 7 и настоящим указаниям, выполнить расчет адаптивно-модальной системы, приняв следующие параметры линеаризованного упругого двухмассового объекта, замкнутого по первой скорости [уравнения (7.6), (7.7), (7.8)]:

Таблица вариантов заданий по самостоятельной работе
|
Параметр |
№ варианта |
|||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
|
|
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
1,0 |
1,0 |
1,0 |
0,1 |
0,1 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,05 |
0,1 |
0,2 |
0,3 |
0,4 |
|
|
25 |
25 |
25 |
50 |
50 |
100 |
250 |
75 |
75 |
50 |
10 |
50 |
75 |
100 |
125 |
25 |
100 |
100 |
100 |
50 |
Каждому студенту в каждой группе необходимо выбрать из таблицы вариантов вариант с номером, соответствующим номеру, под которым он числится в списке своей группы
Расчет выполнить в следующей последовательности, принятой в главе 7.
1. В качестве
двухмассового упругого электромеханического
объекта принять двухконтурную следящую
систему. Ее линеаризованные уравнения
(без учета упругости) имеют вид (7.1),
причем в них, пренебрегая электромагнитной
постоянной инерцией обмотки статора
двигателя, примем
![]() .
Расчет настроек контурных регуляторов
следящей системы выполнить по следующими
формулам (все не раскрытые здесь
обозначения пояснены в главе 7). Формулы
настроек подчиненных контуров следующие:
.
Расчет настроек контурных регуляторов
следящей системы выполнить по следующими
формулам (все не раскрытые здесь
обозначения пояснены в главе 7). Формулы
настроек подчиненных контуров следующие:
для П-регулятора скорости:
![]() ;
;
![]() ;
;
для П-регулятора положения:
![]() .
.
Приведенные
расчетные формулы для контурных
регуляторов скорости и положения
приведены без учета упругих свойств
объекта. Если учесть упругость уравнениями
(7.2 а,б), то такие настройки при пренебрежении
зазора (![]() и
и
![]() )
вызовут слабозатухающие или незатухающие
колебания в системе, изображенной на
рис. 7.1, в чем легко убедится моделированием.
В то же время моделированием также легко
проверить, что в "жесткой" системе
(7.1) указанные настройки обеспечат
удовлетворительное качество переходных
процессов, свойственное правильно
настроенной жесткой электромеханической
следящей системе с подчиненным
управлением.
)
вызовут слабозатухающие или незатухающие
колебания в системе, изображенной на
рис. 7.1, в чем легко убедится моделированием.
В то же время моделированием также легко
проверить, что в "жесткой" системе
(7.1) указанные настройки обеспечат
удовлетворительное качество переходных
процессов, свойственное правильно
настроенной жесткой электромеханической
следящей системе с подчиненным
управлением.
2. Записать линейное стационарное приближение (7.6) уравнений (7.2 а, б) с упругим электромеханическим объектом с параметрами, соответствующими выбранному из таблицы варианту, вычислить коэффициенты, данные соотношениями (7.7), и записать в числовом виде систему (7.8).
3. Коэффициенты
обратных связей модального регулятора
(7.9) рассчитать в соответствии с методикой,
описанной в п. 7.3. главы 7. Значение
![]() в уравнениях (7.15) принять равным
в уравнениях (7.15) принять равным
![]() .
.
4. Расчет идентификатора состояния (наблюдателя) выполнить согласно методики, изложенной в п. 7.4 главы 7, при этом значение множителя q в желаемом характеристическом многочлене (7.20) наблюдателя принять равным q=2.
5. Расчет адаптивного
управления с параметрической настройкой
осуществляется согласно п. 7.7 главы 7.
При этом в уравнениях (7.32) огрублением
пренебрегают и первоначальные значения
параметров принимаются следующие:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
6. Исследование моделированием построенной адаптивной системы является важным этапом ее отладки, так как только в процессе отладки могут быть уточнены значения коэффициентов параметрической настройки.
В процессе
моделирования исследуются переходные
реакции переменных
![]() и
и
![]() линеаризованного упругого объекта
(7.6)÷(7.8) на ступенчатое входное воздействие
линеаризованного упругого объекта
(7.6)÷(7.8) на ступенчатое входное воздействие
![]() при следующих условиях (влиянием зазора
принебрегаем):
при следующих условиях (влиянием зазора
принебрегаем):
-
при усредненных параметрах упругого объекта
 ,
,
 ,
,
 с подчиненным управлением
с подчиненным управлением
 ,
,
 ;
; -
при усредненных параметрах упругого объекта с модальным управлением и наблюдателем;
-
при изменении параметров упругого объекта с модальным управлением и наблюдателем в диапазонах:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 (рассмотреть все сочетания);
(рассмотреть все сочетания); -
при усредненных параметрах упругого объекта с адаптивно-модальным управлением;
-
при усредненных параметрах упругого объекта с адаптивно-модальным управлением при изменении параметров
 ;
; -
для лучших параметрах
 ,
с точки зрения динамики переходного
процесса, упругого объекта с
адаптивно-модальным управлением при
изменении параметров в диапазонах:
,
с точки зрения динамики переходного
процесса, упругого объекта с
адаптивно-модальным управлением при
изменении параметров в диапазонах:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 (рассмотреть все сочетания).
(рассмотреть все сочетания).
7. Результаты самостоятельной работы оформить в виде сброшюрованного научно-технического отчета и сдать экзаменатору при получении экзаменационного билета.
Пример выполнения работы.
Дано:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
РАСЧЕТ МОДАЛЬНОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМЫ С ДВУХМАССОВЫМ УПРУГИМ МЕХАНИЧЕСКИМ ОБЪЕКТОМ И НАБЛЮДАТЕЛЕМ
Расчет замкнутого контура скорости с двухмассовым упругим электромеханическим объектом и подчиненным управлением
Примем в качестве
исходного двухмассовый упругий
электромеханический объект с зазором,
замкнутый по скорости
![]() с контурным П-регулятором и являющийся
внутренним контуром двухконтурной
электромеханической системы (см. рисунок
1). Его дифференциальные уравнения имеют
вид:
с контурным П-регулятором и являющийся
внутренним контуром двухконтурной
электромеханической системы (см. рисунок
1). Его дифференциальные уравнения имеют
вид:
 (1)
(1)
где
![]() – упругий момент, возникающий при
деформации в упругой связи при отсутствии
зазора;
– упругий момент, возникающий при
деформации в упругой связи при отсутствии
зазора;
![]() – упругий момент, описываемый при учете
зазора 2 в упругой
связи нелинейной (недифференцируемой)
функцией вида
– упругий момент, описываемый при учете
зазора 2 в упругой
связи нелинейной (недифференцируемой)
функцией вида
 (2)
(2)
![]() – соответственно,
момент инерции двигателя и момент
инерции механизма нагрузки с учетом
его приведения к вращению двигателя; p
– коэффициент упругости (жесткости
упругой связи);
– соответственно,
момент инерции двигателя и момент
инерции механизма нагрузки с учетом
его приведения к вращению двигателя; p
– коэффициент упругости (жесткости
упругой связи);
![]() – соответственно, угловые скорости
первого и второго дисков
– соответственно, угловые скорости
первого и второго дисков
![]() ;
;
![]() – настраиваемый коэффициент контурного
П-регулятора скорости (
– настраиваемый коэффициент контурного
П-регулятора скорости (![]() );
);
![]() – известное программное (задающее)
воздействие (для внутреннего контура
скорости это выходной сигнал
– известное программное (задающее)
воздействие (для внутреннего контура
скорости это выходной сигнал
![]() регулятора РП);
регулятора РП);
![]() и
и
![]() – соответственно, линейное и адаптивное
управления, подлежащие определению.
– соответственно, линейное и адаптивное
управления, подлежащие определению.
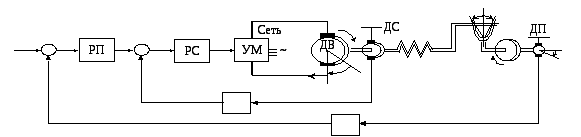
Рисунок 1 - Двухмассовый нелинейный упругий электромеханический объект с подчиненным управлением
Таким образом, описание контура скорости электромеханической следящей системы с двухмассовым упругим механическим объектом исчерпывается (с учетом принятых ранее допущений) системой нелинейных дифференциальных уравнений (1), (2) третьего порядка, записанных в так называемой скоростной форме уравнений упругого объекта. Кроме того, считаем, что в общем случае моменты инерции, отнесенные к двигателю и нагрузке, а также коэффициент жесткости являются неизвестными и нестационарными (функциями времени):
![]() , (3)
, (3)

Рисунок 2 - Детализированная структурная схема замкнутого по первой скорости двухмассового упругого электромеханического объекта с зазором в упругой связи (1), (2)
Замечание. В дальнейших исследованиях будем пренебрегать нелинейностью и нестационарностью уравнений (1)÷(3) исходного упругого объекта (1)÷(3) и будем рассматривать его линейное и стационарное приближение с некоторыми усредненными постоянными параметрами:
![]() . (5)
. (5)
С учетом обозначений
(5) и пренебрегая в уравнениях (1), (2)
зазором (![]() и
и
![]() )
запишем линейное стационарное приближение
контура скорости с упругим механическим
объектом в виде:
)
запишем линейное стационарное приближение
контура скорости с упругим механическим
объектом в виде:
 (6)
(6)
Введем следующие обозначения:
 (7)
(7)
С учетом введенных обозначений перепишем линеаризованные уравнения (6) с усредненными параметрами (7) в компактной форме
![]()
и для удобства представим их в векторно-матричной записи:
 (8)
(8)
где
![]() – вектор состояния линеаризованного
объекта (6);
– вектор состояния линеаризованного
объекта (6);
![]() – уравнение измерения;
– уравнение измерения;
![]() (здесь доступной измерению с помощью
датчика скорости ДС считается первая
скорость
(здесь доступной измерению с помощью
датчика скорости ДС считается первая
скорость
![]() ).
).
Примем дифференциальную линейную систему (8) с параметрами (7) в качестве исходного расчетного объекта управления.
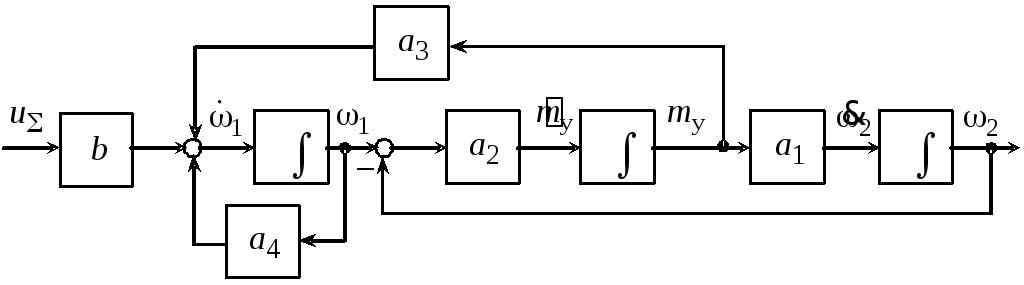
Рисунок 3 - Детализированная структурная схема замкнутого по первой скорости линеаризованного двухмассового упругого электромеханического объекта (6)–(8)
Числовой расчет объекта управления выполним по формулам (7), приняв следующие числовые значения параметров (см. задание):
![]() кгм2;
кгм2; ![]() кгм2;
кгм2;
![]() Нм/рад;
Нм/рад; ![]() Ом;
Ом;
![]() Вс;
Вс; ![]() Вс;
Вс;
![]() ;
; ![]() Вс/рад;
Вс/рад;
![]() В/рад;
В/рад; ![]() рад/с;
рад/с;
![]() = 0,35 (кгм2);
= 0,35 (кгм2); ![]() рад/с;
рад/с;
![]() ;
; ![]() .
.
Расчет контурных
регуляторов
![]() ,
,
![]() выполним по формулам подчиненного
управления, справедливым для жесткого
объекта (при пренебрежении упругой
связью, когда
выполним по формулам подчиненного
управления, справедливым для жесткого
объекта (при пренебрежении упругой
связью, когда
![]() - велико, или
- велико, или
![]() :
:
 ;
;
![]() .
.
Получаем:
• значения контурных
регуляторов
![]() ,
,
![]() :
:
 ;
;
![]() ;
;
• значения параметров (7) дифференциальной линейной системы (8):

Запишем дифференциальную линейную систему (8) в численном виде:

Сначала построим объект (6), (7) без учета упругих свойств, упрощая их и получая систему уравнений трехконтурной следящей системы с жестким объектом вида:

Далее построим и
проведем исследования двухконтурной
следящей системы с жестким объектом,
принимая в ней
![]() ,
,
![]() ,
,
![]() :
:

Получим переходный процесс вида (см. рисунок 4). На рисунке 5 представлен график переходного процесса в двухконтурной следящей системе с жестким объектом и подчиненным регулированием.
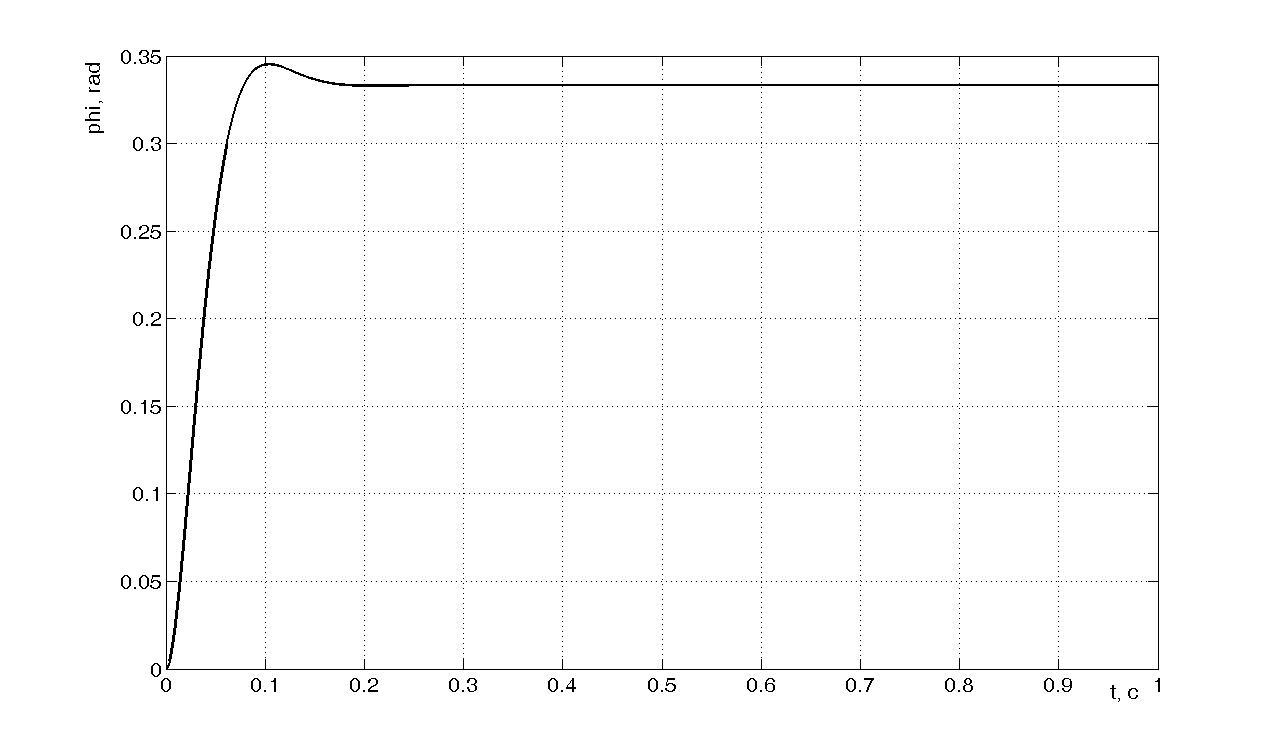
Рисунок 4 - Переходный процесс в двухконтурной следящей системе с жестким объектом и подчиненным регулированием.


а б
Рисунок 5 - Переходный процесс в системе
с двухмассовым упругим объектом с
подчиненным регулированием:
а) при
![]() ,
,
![]() ;
б) при
;
б) при
![]() ,
,
![]() .
.