

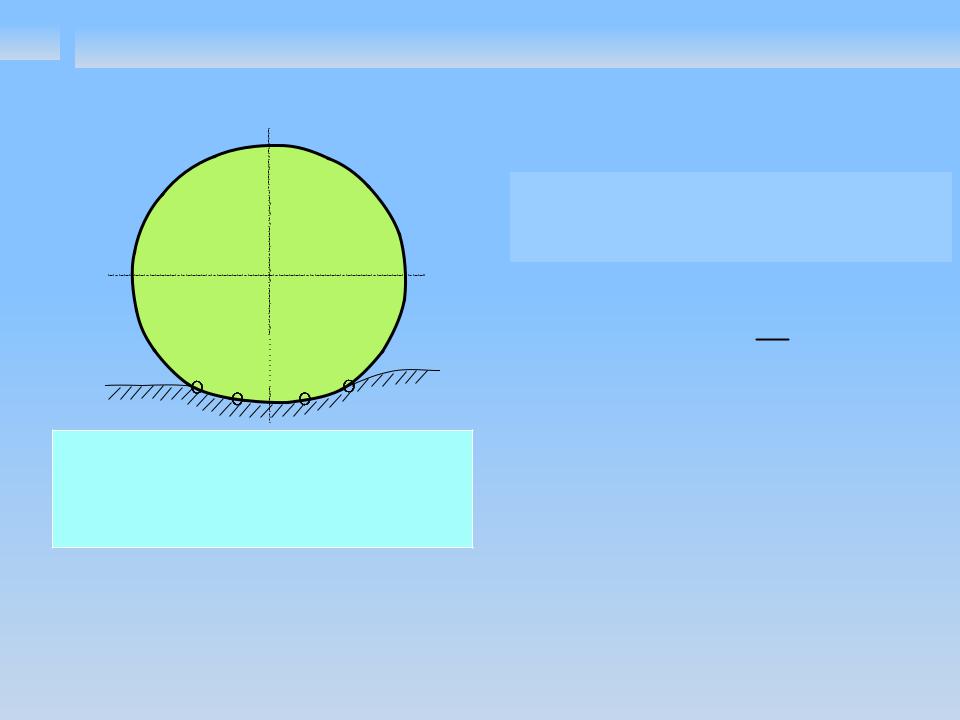
11 Траектории движения точек контактов гребней колес (Б1) с
боковой поверхностью головки рельса при наличии «забега» λгр.
|
|
|
|
|
|
|
|
|
|
Зависимость приведенной длины |
|||
|
|
|
|
|
|
|
|
|
|
скольжения гребня по головке |
|||
|
|
|
|
|
|
|
|
|
|
рельса от угла набегания колесной |
|||
• |
V |
• |
О • |
|
ζ |
|
• |
О |
|
пары на рельс в прямом участке. |
|||
|
|
|
|
|
12 |
|
|
|
|||||
|
|
|
|
|
Г |
|
|
|
|
% |
|
|
|
|
|
|
|
|
|
|
Колесо |
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
• |
|
|
8 |
|
1 |
|
|
|
|
• |
2 |
|
|
r |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
4 |
|
|
6 |
|
|
|
||||
• |
r |
|
|
|
|
|
к |
|
3 |
|
|
||
• |
1 |
|
|
|
|
|
|
4 |
|
|
2 |
||
|
|
|
• |
5 |
|
|
|
2 |
|
|
|||
|
г |
|
• |
К |
|
|
|
4 |
|
|
|||
• |
р |
|
|
|
|
• |
D |
|
|
|
|||
|
D |
|
|
|
|
|
|
|
0 |
1 |
2 |
3 град 4 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
• |
Б |
|
• λ |
• Б |
|
|
|
|
|
|
Гр |
|
|
|
|
Б • |
∆ |
1 – стандартная колесная пара; |
|||||||
|
|
|
0 |
|
г |
1 |
• |
2 – новая конструкция колесной пары. |
|||||
|
|
|
|
|
р |
|
|
Рельс |
|
Максимально возможные значения |
|||
|
|
|
|
|
|
|
|
угла набегания гребня на рельс: |
|||||
|
|
|
3 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
3 – стандартная колесная пара; |
||||
|
|
|
|
|
|
|
|
|
|
4 - новая конструкция колеса. |
|||

12 |
Траектории оси рельсовой колеи и продольного движения |
|
|
|
центра масс тележки относительно координат ХТ и YТ. |
• |
2 |
• 1 |
|
0 |
|
•м
м
• |
Y |
|
• 2 |
• |
02 |
• 5 • 6 |
• 3 |
•м
м
• |
1 |
• 4 |
|
|
0 |
|
|
• |
0 |
|
|
2 |
• 8 |
• 9 |
|
|
0 |
||
|
|
•м
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Y |
|
|
|
• |
7 |
|
• |
3 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|||||
|
1 |
• |
0 |
4 |
8 |
12 |
16 |
20 |
24 |
28 32 |
36 |
40 |
44 мм |
|
• |
- |
|
52 |
|
|
|
|
|
|
|
|
); 2 – в плане (y ). |
||
Траектория оси рельсовой колеи: линии: 1 – по уровню (z |
|
|||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
• |
|
|
|
|
|
|
|
|
П |
|
L |
П |
|
0 |
|
|
|
|
|
|
|
|
|
||||
Траектория движения стандартной колесной пары: линия 3 – y = 0 мм. |
|
|||||||||||||
• |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
Траектории0 движения тележки с новой конструкцией колесных пар: при воздействии неровностей• - в плане: линии 4 – y 0 = 0 мм; 5 – y 0 = 6,0 мм ; при воздействии неровностей
по уровню1 и в плане: линии: 6 – y 0 = 0 мм; 7 – y 0 = 0 мм; 8 – y 0 = 6,0 мм; 9 – при
0
скорости движения V =50,0 м/с.

13 |
Положение колесных пар относительно оси рельсовой |
|
колеи по координате УКП : |
||
|
•2
|
0 |
• |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
3 |
|
|
|
|
|
|
|
|||
• |
м |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
1 |
|
|
|
• |
2 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
• |
а |
|
|
|
|
|
• |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
• |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
• |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
1 |
|
• |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
• |
б |
|
|
|
|
|
• |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
• |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
м |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
1 |
|
|
|
|
|
• |
2 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
• |
|
0 |
4 |
8 |
12 |
16 |
20 |
24 |
28 |
32 |
36 |
40 |
44 |
м |
• |
-0 |
|
52 |
|
|
|
|
|
• |
в |
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,05
y 5,76м
СР
0,025
y 5,64м
СР
0,01
yСР 5,48мм
1 – траектория оси рельсовой колеи по уровню (zП ); 2 – траектория оси рельсовой колеи в плане (yП); 3 – движение колесной пары при y0= 0 мм и μ=0,05
(стандартная конусность); 4 - движения колесной пары при μ=0,025; 5 - движения колесной пары при μ=0,01.
14 Трение качения одиночного колеса по поверхности
a a  b b
b b
Взаимодействие колеса с опорной плоскостью в процессе качения по теории Рейнольдса
Зависимость для силы трения качения одиночного колеса, предложенная Кулоном
T k Pr

15
•Общие сведения о трении качения
Согласно теории Рейнольдса [4], трение качения формируется за счет встречного микроскольжения материалов в плоскости вращения колеса на противоположных концах площадки контакта «колесо-рельс» аа´ и b´b которая, согласно теории Герца, имеет форму эллипса. В центре площадки контакта (а´ b´) действует трение "покоя»

16 |
Трение скольжения |
Зависимость коэффициентов трения скольжения (f) от относительной скорости проскальзывания ( кр ).
f |
1 |
2
fК.ma 3 fП.ma 
кр.3 |
кр.2 |
кр.1 |
кр |
Линии для уровней нагрузки:
1 – малой; 2 – средней; 3 – большой.
2. Формулы И.В. Крагельского
|
|
|
f a b e c |
d |
|
|
||||
f |
|
|
0 |
0,44 |
hmax |
0,5 Pc 0,25 |
||||
П |
|
|
|
|
|
|
|
|
||
|
|
|
||||||||
|
|
HB |
|
|
|
|
|
|||
|
|
|
|
|
R |
|
E |
|||
3. Формула Боше:
f |
|
k |
1 0 ,03 |
4. Формула Вихерта:
f |
1 a |
f 0 |
|
1 b |
|
5. Формула Франке:
ff 0 e c
6.Формула ВНИИЖТа:
f |
|
17 |
|
|
|
||
|
|
( 40 ) |
|
P |
|||
7.Сила крипа по Картеру:
КN
VК

17
•Общие сведения о трении скольжения Как известно, характеристика трения скольжения состоит из трех зон (рис. 1, [4]): в первой зоне при отсутствии относительного движения между двумя телами (ɛ=0 ) коэффициент трения скольжения
имеет постоянное значение – это трение" покоя" (fп ); во второй зоне начинается относительное перемещение контактирующих тел и с ростом абсолютной скорости относительного скольжения (ɛ>0) коэффициент трения скольжения увеличивается от значения
трения "покоя" (fп ) до максимального (fД max ) – эта зона, так называемого "трения движения" (fД max ). Максимальное значение общего коэффициента трения ( ) (критическая точка) равно сумме значений коэффициентов двух видов трения:
• |
fC max = fП max + fД max |
•. Третья зона находится за критической точкой, основной особенностью которой является отрицательный наклон характеристики "трения движения" – это зона боксования.

Векторные диаграммы сил трения и абсолютных
18 скоростей относительного проскальзывания в точке контакта колесо – рельс.
F Х |
|
F |
|
F2X |
|
F2 |
F X |
|
|
F3 |
|
|
|
|
X |
|
F4 |
|
||
|
1 |
|
|
|
|
|
|
|
|
|
F4 |
|
|
|
|
|||||
|
1 |
|
|
|
OЦ |
|
3 |
|
|
|
|
|
|
OЦ |
|
|
|
|||
|
OЦ |
1 |
Y |
|
Y |
OЦ |
|
|
Y |
|
|
|
4 |
Y |
|
|||||
F2X |
|
F1 |
F2X |
|
2 |
F2 |
1 |
|
3 |
F3 |
|
|
FПX FКX |
|
|
|
F4 |
|
||
|
|
|
|
|
|
|
OЦ |
|
|
|
|
OЦ |
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
б |
|
|
|
в |
|
|
|
|
|
|
|
г |
|
|
|
|
|
1 0 |
|
|
|
|
|
|
3 |
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
||||
|
|
|
|
2 |
|
2 |
Х |
|
3 |
|
|
|
4 |
|
|
|
||||
0 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||||
1 |
ОЦ |
|
|
|
ОЦ |
|
Х |
ОЦ |
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
Х |
|
3 |
|
Х |
|
|
|
|
|
4 |
|||
|
|
|
|
Y |
|
2 |
|
|
|
|
4 |
|
О |
|
4 |
|
||||
|
|
|
|
|
|
|
Кр |
|
|
|
|
Ц |
|
|
|
|||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
д |
– ( ОЦ 1) |
|
|
е |
|
|
|
ж |
|
|
|
|
|
|
|
з |
|
|
Окружности: |
геометрическое место |
предельных |
значений результи- |
|||||||||||||||||
рующих векторов сил трения – трения «покоя» ( FП. max ); (ОЦ 2 ) |
– геометрическое |
|||||||||||||||||||
место предельных значений суммы результирующих векторов сил трения "покоя"
и "крипа" ( |
|
|
|
|
|
|
|
|
); |
( |
) – геометрическое место критических значений |
|||
|
|
F |
П. max |
|
F |
К. max |
|
|
ОЦ 3 |
|
|
кр ) колеса по |
||
результирующих векторов абсолютной скорости скольжения ( |
|
|
||||||||||||
|
||||||||||||||
рельсу. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|

19 |
Зависимости сил сцепления колесной пары новой |
|||||
|
|
|
конструкции |
|
|
|
|
|
|
|
|
|
|
140 |
|
|
|
100 |
|
|
кН |
|
|
|
|
|
|
|
|
|
кН |
1 |
2 3 4 |
|
120 |
|
|
|
|||
РΣ |
|
|
|
80 |
|
|
100 |
|
|
|
|
|
|
4 |
|
|
РТ |
|
|
|
|
|
|
|
|
||
80 |
3 |
|
|
60 |
|
|
|
|
|
|
|
|
|
60 |
|
|
|
40 |
|
|
|
|
|
|
|
|
|
40 |
|
2 |
|
|
6 |
|
|
|
|
20 |
|
|
|
20 |
|
|
|
5 |
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
0 |
0,1 0,2 0,3 0,4 |
0,5 % |
0,7 |
0 0 40 |
80 120 160 200 км/ч 280 |
|
0 |
|
V |
|
|||
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
От относительной скорости |
|
От скорости движения подвижного состава: |
||||
|
Линии амплитуд извилистого движения: 1 – |
|||||
проскальзывания: |
|
|
||||
Линии: 1 и 2 – силы сцепления |
|
h=5; 2 – h=10; 3 – h=15; 4 – h=20; |
||||
стандартного колеса и колесной пары, |
5 – зависимость предельной силы сцепления |
|||||
соответственно; 3 и 4 – силы сцепления |
стандартной колесной пары (h=0,1 м и L = |
|||||
новой конструкции колеса и колесной |
20м); 6 – расчетная зависимость силы |
|||||
пары, соответственно. |
|
|
сцепления по методике ПТР. |
|
||

20 |
Зависимость амплитуд ускорений колесной пары от |
скорости движения
(при воздействии сочетаний неровностей в прямом участке рельсовой колеи)
|
|
|
|
|
|
|
|
|
• |
|
|
• 0 |
|
|
|
• |
2 |
• |
1 |
3 |
• 1 |
|
|
|
, |
|
|
|
|
0, |
z•КП |
|
|
||
|
8 |
• 1 |
|
|
|
|
|
g |
|
|
|
y |
КП |
|
|
|
|
|
|
|
|
|
|
• g |
|
|
|
•КП |
|
|
2 • |
|
|
||
|
|
|
|
• 2 |
|
1/ |
|
• |
|
|
|
• 0 |
|
|
|
|
с |
|
|
2 |
|
• 2 |
|
|
, |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6• |
0 100 |
|
• |
0 |
100 |
• |
0 100 |
|||
|
|
200 |
|
км/ч |
• 1 |
200 км/ч |
|
200 км/ч |
|||
|
|
|
а |
|
|
|
|
б |
|
в |
|
а) ускорения по координате |
y |
|
|
|
|
; |
|||||
КП ; б) ускорения по координате КП |
|||||||||||
в) ускорения по координате |
zКП . |
|
|
|
|
||||||
Линии: 1 – стандартная колесная пара; 2 – новая конструкция колесной пары.