

Фазовый портрет извилистого движения колесной пары с проскальзыванием без касания гребней головок рельсов


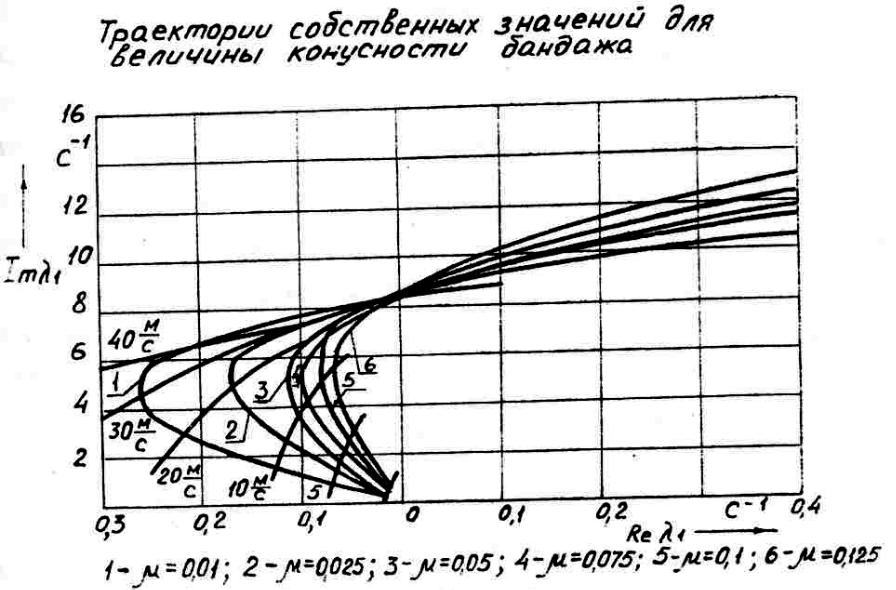
•Положительным эффектом извилистого движения является то, что гребни колес контактируют с боковыми поверхностями головок рельсов только при наибольшем отклонении колесной пары от оси пути. Это способствует уменьшению износа гребня, и поэтому полностью устранять извилистое движение нецелесообразно. Следует только ограничивать его амплитуду и увеличивать длину волны. Для этого нужно уменьшать зазоры между гребнями колес и головками рельсов (за счет уменьшения ширины колеи и ограничения допускаемого износа гребней), уменьшать коничность колес и создавать упруго-фрикционные связи между осями в плане, препятствующие их относительным поворотам в процессе извилистого движения.

Расчетная схема динамической модели системы |
|||||||||||||||
|
|
|
|
«экипаж – путь». |
|
|
|
|
|
||||||
|
|
|
|
|
Главный вид |
|
|
|
|
|
|
||||
|
|
|
|
|
|
ZКуз |
Куз |
|
|
|
|
|
|
|
|
|
|
|
|
|
ОКуз |
|
YКуз |
|
|
|
2 |
|
|
||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
hКуз |
|
z |
Кузz |
|
|
ZТ |
|
|
|
|
YT |
z |
|
||
|
CКуз |
F |
|
|
|
T |
|
|
F |
CКуз |
|
||||
|
|
|
|
|
|
|
|
|
|
|
Куз |
|
|
||
|
|
|
Куз |
|
|
|
|
|
|
|
|
|
|
|
|
|
CБz1; Б1z |
|
|
CКузy |
|
ОT CКузy YT |
|
|
|
CБz 2 ; Б2z |
|||||
|
|
|
b |
|
|
|
|
b |
|
|
|
||||
hТ |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
y |
y |
|
|
|
zкп |
|
|
|
|
|
|
|
y |
y |
|
|
CБ1; Б1 |
|
|
|
αкп |
yкп |
|
|
|
|
|
CБ 2 ; Б2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
z |
|
|
|
|
|
|
mкпп |
|
z2 |
|
|
|
r1 |
|
|
1 |
|
|
|
Окп |
|
|
|
|
|
|
|
|
|
|
|
δ |
|
|
|
|
|
|
δ2 |
|
η2 |
|
||
|
|
η1 |
|
s1 |
αп |
zп |
|
|
|
|
|
|
|||
hп |
|
|
1 |
|
|
s2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
CПy |
2; П2y |
|
CПy 1; П1y |
|
|
|
Oп |
yп |
|
|
|
mп |
||||||
|
z |
z |
CПz 2 |
; П2z |
|
|
|||||||||
|
|
|
|
CП1; П1 |
|
|
|
|
|
|
|||||

Расчетная схема динамической модели системы «экипаж – путь».
Вид в плане.
CБx1; |
uК |
|
|
Бx1 |
|
|
|
Ψкп1 |
хкп1 |
|
|
Oкп |
yкп1 |
||
Ψт |
хт |
||
|
|||
|
|
||
Oт |
|
yт |
|
|
|
||
Ψкп2 |
хкп2 |
|
|
u |
|
|
|
|
Oкп2 |
yп2 |
|
Ψк |
хк |
|
|
|
|
||
|
|
yк |
|
Oк
CБx 2 ;
Бx2
b
Дифференциальное уравнение движения относительно координаты Z – вертикальное движения.
Дифференциальное уравнение движения относительно координаты α – боковая качка.
|
|
|
|
|
|
|
z |
|
|
2 |
|
|
|
z |
|
|
2 |
|
|
|
|
z |
(2S0 |
|
y |
|
|
|
y |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
y |
|
2 |
|
|
|
y |
|
y |
|
|||||||
КП {(2CП |
S0 |
|
2СБ |
n0 |
А СП |
( 1 |
2 |
) 1 |
2 |
) СП |
hКП |
(Q1П Q2П )) КП |
||||||||||||||||||||||||||||||||||||||||||||||||
[2 S |
0 |
C z |
А( 2 С z |
|
( y y ) С z |
(z z |
2 |
z |
01 |
z |
02 |
|
z2 z1 |
( y y )) |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
П |
|
|
|
1 |
2 |
|
|
|
П |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
S0 |
|
|
|
1 |
|
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
C y h |
|
|
|
|
(Q y |
Q y |
)] y |
|
|
Г С z |
( |
z2 z1 |
) y |
2 |
|
|
А С z |
( y |
y ) z |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
КП |
КП |
|
|
|
КП |
КП |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
П |
|
|
|
1П |
|
|
2П |
|
|
|
|
|
|
|
|
П |
|
|
|
|
S0 |
|
|
|
|
|
|
|
|
|
|
|
П |
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 Г С z |
[ y |
КП |
z |
КП |
|
КП |
y2 |
|
0,5 ( y y ) |
КП |
y |
КП |
] h2 |
|
[2 z |
2 z |
|
(4.6.33); |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
КП |
|
|
Б |
|
|
|
П |
|
||||||||||||||||||||
|
y |
|
|
|
y |
|
|
|
|
y |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
y |
|
y |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
y |
|
|
|
|
y |
|
||||||||||
П (Q1П Q2П )] |
КП П |
|
hКП (Q1П |
Q2П ) yКП |
П |
hКП ( 2 |
Q2П |
1 |
Q1П ) |
|
||||||||||||||||||||||||||||||||||||||||||||||||||
2 S 2 F |
|
|
sign |
|
2 h |
|
|
|
К |
|
|
|
|
2 К h |
КП |
y |
|
|
|
|
|
2 K h2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
КП |
КП |
|
|
|
|
|
|
|
|
КП |
|
|
|
|
|
|
|
КП |
КП |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
0 |
|
|
|
КП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
B [С В |
(s |
0 |
(z |
2 |
z z |
02 |
z |
01 |
) ( y |
|
y ) ( |
z1 z2 |
) (z |
2 |
z ) ( y y ) |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
П |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|||||||||||
|
z2 z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
( 1y 2 1y 2 ) z01 1y z02 2y СПy hКП ( 2y Q2yП 1y Q1yП ) |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2s0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J X |
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
J X ) 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
n |
(z |
|
z |
))]} / (J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
КП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
2s0 |
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Дифференциальное уравнение движения относительно координаты Y – боковой относ.
|
y |
y |
|
|
y |
|
|
|
|
y |
|
|
CПz |
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
||||
yКП {СП (Q1П |
Q2П ) |
2 C |
Б А [ |
|
|
|
|
(z1 |
z2 z01 |
z02 )] yКП А [CП |
(z1 z2 |
z01 z02 |
||||||||||||||||||||||||
s0 |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
( 2y 1y ) Pоб |
СПy |
|
|
|
(Q1yП |
Q2yП )] КП А CПz |
|
z |
2 |
z |
1 |
( y |
y ) |
|
|
|
|
|
|
|||||||||||||||||
hКП |
( |
|
|
|
2 |
|
1 |
) zКП |
|
|
(4.6.34); |
|||||||||||||||||||||||||
|
|
|
|
s0 |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
CПz |
|
|
|
|
|
|
|
|
|
|
y |
y |
|
y |
|
|
y |
|
|
|
y |
|
|
|
|
y |
y |
|
|
Г (СП zКП |
КП |
|
|
|
|
zКП yКП ) (2 |
Б |
П |
(Q1П |
Q2П )) yКП П hКП (Q1П Q2П ) |
КП |
|||||||||||||||||||||||||
s0 |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
y |
y |
y |
|
y |
|
|
y |
|
|
|
|
|
|
|
|
2 K |
|
|
|
|
|
|
|
|
z |
z2 z1 |
|
|
|
|
|
|||||
|
|
Q2П ) 2 |
K КП VКП (yКП hКП |
|
|
|
|
П ( |
2s0 |
|
|
) (z1 |
z2 z01 |
z02 |
||||||||||||||||||||||
П |
( 1 |
Q1П 2 |
КП ) |
|
B [C |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
C z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
( y y )) |
|
П |
( y |
y ) (z |
01 |
z |
02 |
) С y |
y Q y |
С y |
y Q y |
]} / m |
КП |
|
0; |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
2 |
1 |
|
2s0 |
2 |
|
|
1 |
|
|
|
|
|
П |
1 |
1П |
|
|
П |
2 |
2П |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||