

VXu6DfKYPE
.pdfМИНОБРНАУКИ РОССИИ
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Санкт-Петербургский государственный электротехнический
университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
В. А. ПАРФЕНОВ Д. Н. РЕДЬКА А. А. ЖУРАВЛЕВ
ЛАЗЕРНОЕ 3D-СКАНИРОВАНИЕ
Учебно-методическое пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2016
УДК 621.373.8(07) + 528.8.042.8(07) ББК З86-53я7
П18
Парфенов В. А., Редька Д. Н., Журавлев А. А.
П18 Лазерное 3D-сканирование: учеб.-метод. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2016. 20 с.
ISBN 978-5-7629-1898-5
Посвящено технологии трехмерного лазерного сканирования. Содержит сведения о физических основах лазерного сканирования и создания компьютерных 3D-моделей объектов. Приводится описание лабораторной работы, входящей в состав лабораторного практикума по физическим основам лазерной техники и лазерных технологий. Выполнение данной работы служит закреплению и углублению знаний, полученных в теоретических курсах.
Предназначено для подготовки магистров и бакалавров по направлению 210100.62 – «Электроника и наноэлектроника» (по профилю 210103.62 – «Квантовая и оптическая электроника»), а также магистров по направлению 210100.68 – «Электроника и наноэлектроника» (по образовательной программе 210144.68 – «Солнечная гетероструктурная фотоэнергетика»). Также может быть полезным инженерно-техническим работникам, специализирующимся в области оптико-электронных и лазерных систем.
УДК 621.373.8(07) + 528.8.042.8(07) ББК З86-53я7
Рецензент: канд. физ.-мат. наук, вед. науч. сотр. А. В. Сандуленко (АО «Научно-исследовательский технологический институт оптического материаловедения Всероссийского научного центра «Государственный оптический институт им. С. И. Вавилова»).
Утверждено редакционно-издательским советом университета
в качестве учебно-методического пособия
ISBN 978-5-7629-1898-5 |
© СПбГЭТУ «ЛЭТИ», 2016 |
2
ОБЩИЕ СВЕДЕНИЯ О ЛАЗЕРНОМ 3D-СКАНИРОВАНИИ
Лазерное 3D-сканирование – это метод получения информации о геометрической форме и размерах объектов.
В основе лазерного сканирования лежит принцип лазерной дальнометрии, т. е. измерения расстояния с помощью регистрации отраженного от поверхности объекта излучения лазера. Измеряя расстояние между сканером и объектом и зная угол отклонения лазерного луча в горизонтальной и вертикальной плоскостях, можно получить трехмерные координаты каждой отдельной точки его поверхности в системе координат сканера, а затем с помощью дополнительных операций и специализированного программного обеспечения привязать полученный массив данных к любой другой системе координат.
Принцип сканирования заключается в том, что после измерения координат отдельной фиксированной точки на поверхности объекта лазерный пучок поворачивается на некоторый заданный угол, для того чтобы перейти на следующий узел мнимой координатной сетки, где вновь производится определение координат. Так продолжается до тех пор, пока не будет просканирована вся поверхность изучаемого объекта. Координаты отдельных точек, зарегистрированные в процессе сканирования, объединяются в группы, называемые облаками точек. Фактически облако точек – это точечная трехмерная модель (3D-образ), отражающая все индивидуальные особенности поверхности объекта. Чем больше точек в облаке, тем выше степень ее детализации. Существует 3 основных метода лазерного 3D-сканирования:
1.Импульсный метод.
2.Фазовый метод.
3.Метод лазерной триангуляции.
Импульсный (или, как его еще называют, времяпролетный) метод основан на импульсной лазерной дальнометрии. Искомое расстояние определяется посредством измерения интервала времени от момента испускания импульса лазерного излучения до момента его регистрации после отражения от поверхности регистрируемого объекта. В настоящее время именно этот метод получил наиболее широкое применение на практике. Он может быть использован для сканирования объектов практически любого размера. В области сохранения культурно-исторического наследия сканеры данного типа обычно применяют для паспортизации и получения рабочих чертежей памятников архитектуры.
3
Вфазовых дальномерах лазерное излучение промодулировано по фазе одним или несколькими гармоническими сигналами. Искомое расстояние до объекта определяется сравнением фазы модулирующего сигнала на выходе приемника излучения (это фаза излучения, прошедшего путь до объекта и обратно) с фазой опорного сигнала (это фаза исходного излучения лазера). Это обеспечивает очень высокую точность измерения расстояния (она может быть сравнима с длиной волны лазера), но дальность действия таких дальномеров существенно меньше, чем в импульсной дальнометрии. Кроме того, из-за сложности аппаратной реализации 3D-сканеров, работающих на принципах фазовой дальнометрии, они имеют очень высокую стоимость, и в настоящее время не получили широкого распространения.
Втриангуляционных сканерах излучение лазера преобразуется в узкую полоску света, которая проецируется на поверхность объекта и регистрируется фотоприемником после ее отражения. Искомое расстояние определяется посредством измерения угла в соответствующем треугольнике. Триангуляционные сканеры обеспечивают довольно высокую точность измерений (до 50 мкм), но из-за ограниченного уровня мощности используемых лазеров, работающих в непрерывном режиме генерации, они пригодны только для сканирования небольших (размером не более 50×50 см) объектов. В музейной работе сканеры данного типа обычно используются для создания 3D-моделей скульптур и предметов декоративно-прикладного искусства.
Лазерное 3D-сканирование любого объекта выполняется в 2 этапа:
1. Сканирование объекта. Это процесс получения данных об объекте с помощью сканирующей системы. Перед началом сканирования объект необходимо подготовить и выбрать оптимальный для данной конкретной задачи тип сканера, а также обеспечить необходимые условия для бесперебойной работы его высокоточной аппаратуры, чувствительной к воздействию окружающей среды. Следует иметь в виду, что такие факторы, как влажность и температура воздуха, форма объекта сканирования и оптические свойства его поверхности могут существенно повлиять на точность соответствия созданной 3D-модели сканируемому объекту. После подготовки начинается сам процесс сканирования, в результате чего возникает набор так называемых сканов, которые содержат детальную информацию о форме и размерах объекта.
Скан – это облако точек от той части поверхности объекта, которая попадает в поле зрения сканера в каждый конкретный момент съемки. Для того
4
чтобы отсканировать предмет целиком, сканер нужно перемещать в пространстве таким образом, чтобы зарегистрировать координаты отдельных точек по всей поверхности объекта. Таким образом, процесс сканирования в чем-то аналогичен поракурсной фотографической съемке, хотя в действительности между ними нет ничего общего.
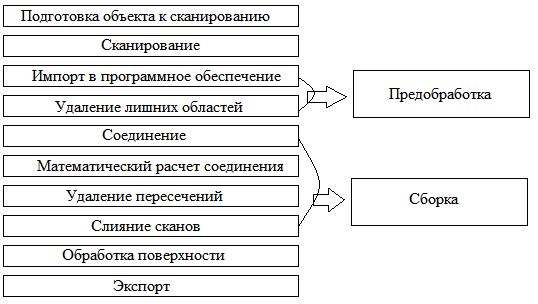
2. Создание 3D-модели с использованием специализированного программного обеспечения. Эта процедура включает в себя предварительную обработку результатов сканирования, сборку (совмещение) отдельных сканов в единое облако точек (конечную 3D-модель) и обработку поверхности этой модели.
Рис. 1. Алгоритм сборки и обработки данных 3D-сканирования
Создание 3D-модели – сложный многоступенчатый процесс, занимающий основную часть времени всей процедуры сканирования и моделирования. Чем более высокие требования по точности предъявляются к 3D-модели, тем тщательнее должны проводиться операции по предобработке сканов и их соединению между собой. На рис. 1 представлен общий алгоритм сборки сканов в 3D-модель. Заметим, что на этапе предобработки проводится удаление так называемых паразитных (лишних) областей. Этим термином называют любые предметы, случайно попавшие в поле зрения сканера. Это могут быть, например, деревья, заслоняющие фасад здания, или фрагмент пола, на котором в момент сканирования была установлена скульптура в музее, и т. д.
5
Конечным результатом сканирования любого объекта является создание его компьютерной 3D-модели. Фактически, 3D-модель – это просто компьютерный файл (например, в формате STL – Stereolitography), который можно легко экспортировать в любой стандартный формат обмена 3D-дан- ными. Это может потребоваться, например, для создания чертежей объекта. Они могут быть получены как при помощи специализированной программы для сканирования, так и стандартного программного обеспечения, например программы AutoCAD. Кроме того, возможно также создание компьютерной анимации, которая будет включать в себя «облет» полученных облаков точек (т. е. движение вокруг 3D-модели объекта) и т. д. Все эти действия пользователь производит на экране компьютера с точечной 3D-моделью объекта, которую можно легко поворачивать и перемещать в пространстве.
Первые лазерные сканеры появились в конце 1980-х гг., и в настоящее время лазерное 3D-сканирование превратилось в отдельное быстроразвивающееся научно-техническое направление в области лазерных информационноизмерительных технологий. Основными областями его применения сегодня являются:
1.Промышленная геодезия.
2.Реверс-инжиниринг (создание 3D-модели прототипа промышленного изделия в CAD-средах с последующим переводом ее в рабочие чертежи).
3.Архитектура.
4.Археология и музейное дело.
5.Судостроение и аэрокосмическая промышленность.
6.Медицина.
7.Криминалистика.
6
Лабораторная работа. СОЗДАНИЕ КОМПЬЮТЕРНОЙ 3D-МОДЕЛИ ОБЪЕКТА
Цель работы: изучение физических принципов лазерного 3D-сканирова- ния, получение навыков практической работы со сканерами и создания компьютерных 3D-моделей объектов.
Описание лабораторной установки
Лабораторная установка представляет собой измерительный стенд, с помощью которого проводится лазерное 3D-сканирование малогабаритных объектов.
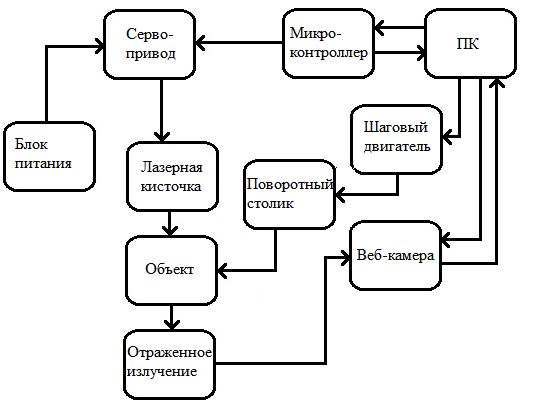
Рис. 2. Блок-схема установки
Рис. 2 иллюстрирует функциональную схему лабораторной установки. В ее состав входят следующие функциональные модули: лазерный излучатель (так называемая лазерная кисточка); веб-камера; персональный компьютер (ПК); микроконтроллер; поворотный столик; сервопривод.
Помимо перечисленных элементов в состав установки входит также зона сканирования, представляющая собой конструкцию, образованную двумя вертикальными пластинами, жестко соединенными между собой под углом 90°.
7
На поверхности этих пластин нанесены специальные реперные марки, представляющие собой кружки черного цвета.
Данная сканирующая система относится к категории лазерных сканеров триангуляционного типа. В качестве лазерного излучателя используется маломощный полупроводниковый лазер с длиной волны 650 нм. При помощи цилиндрической линзы пучок его излучения преобразуется в световую линию, которая проецируется на поверхность снимаемого объекта. В процессе сканирования эта линия перемещается по поверхности объекта, и отраженное от нее излучение регистрируется веб-камерой, подключенной к персональному компьютеру. Оператор управляет траекторией движения лазерного луча при помощи микроконтроллера, также подключенного к компьютеру.
Перед началом сканирования веб-камера калибруется по реперным маркам. Для этого задается масштаб измерительной сетки, который определяется положением маркеров. На основании этих данных при помощи специального программного обеспечения формируется система координат. После калибровки сканируемый предмет помещается на поворотный столик и оператор задает угол, на который сервопривод должен переместить в вертикальной плоскости световую линию лазерной кисточки.
Чтобы получить информацию обо всей поверхности объекта, в процессе сканирования его нужно поворачивать вокруг вертикальной оси. Это выполняется по команде оператора при помощи поворотного столика. Веб-камера регистрирует изображение линии лазерного излучения, перемещающейся по поверхности объекта. В результате компьютерной обработки этого изображения, а также данных, полученных при калибровке веб-камеры в начале работы, формируется облако точек, соответствующее рельефу отсканированной поверхности.
Программа работы
1.Включение установки и подготовка ее к работе.
2.Проведение сканирования объекта, заданного преподавателем.
3.Создание 3D-модели отсканированного объекта.
4.Анализ полученных результатов. Подготовка отчета по лабораторной работе.
8
Порядок выполнения работы
Управление работой осуществляется с помощью программы «3D Laser Scaner Remote Control System», иконка которой расположена на рабочем столе персонального компьютера. Команды оператора, задаваемые им с помощью этой программы, поступают на микроконтроллер (МК) на базе системной платы Arduino. МК активизирует шаговый двигатель, который поворачивает находящийся на подставке предмет, а также сервопривод, перемещающий лазерный луч.
1.Включить ПК.
2.Включить БП (ВНИМАНИЕ! Положение ручек для настройки напряжения и силы тока должны быть следующие: регулятор настройки силы тока выкручен в крайнее правое положение, таким образом выбран режим автомати-
ческой подстройки подаваемого тока, а напряжение должно быть 4.8 В. |
В |
противном случае есть риск сжечь сервопривод). |
|
3.Подключить МК к USB-порту ПК и убедиться, что система опознала устройство (сообщение в правой нижней области экрана, свидетельствующее
отом, что распознано устройство Arduino).
4.Открыть окно программы «3D Laser Scaner Remote Control System» (рис.
3):
4.1.Цифрой 1 обозначено всплывающее меню COM-портов ПК, выбрать порт, к которому подключен МК. Как правило, активен один-единственный COM-порт, соответствующий плате микроконтроллера, но при возникновении затруднений следует свериться со списком устройств через «Диспетчер устройств», в котором отображаются все устройства, подключенные к ПК.
4.2.После выбора COM-порта нажать кнопку «Connect» под цифрой 2.
4.3.Для регулировки положения сканируемого объекта можно настраивать
2 параметра: угол поворота подставки (диапазон регулировки угла: 0…120°), регулировка производится при помощи ползунка в блоке «Stepper Motor», установленное значение угла отображается в окне 3), и направление вращения (влево-вправо, переключением кнопок под цифрой 4). После задания настроек необходимо нажать кнопку «Rotate» рядом с цифрой 5), после чего подставка начнет вращаться.
4.4. Для запуска сканера работаем с блоком «Servo». Максимальный и минимальный углы, на которые может поворачиваться сервопривод, – 0° и 180°, где 0° – крайнее нижнее положение, перпендикулярное плоскости рабочего
9
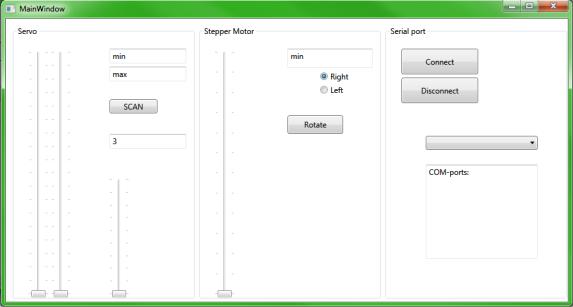
стола. Для сканирования необходимо задать так называемый сектор, внутри которого будет проходить лазерный луч. Данный сектор задается посредством выставления максимального (ползунок под цифрой 7) и минимального (ползунок под цифрой 6) положений сервопривода, значения которых отображаются в соответствующих окнах, а разница между ними в градусах и есть размер этого самого сектора. Так же можно задать время, указанное преподавателем, за которое сервопривод провернется на угол, равный размеру сектора (ползунок под номером 8). Минимальное значение по умолчанию – 3, максимальное
– 30. После выставления настроек необходимо нажать на кнопку «SCAN» (9), после чего сервопривод начнет работу.
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
6 |
|
|
|
9 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
4 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
||
Рис. 3. Интерфейс программы «3D Laser Scaner Remote Control System»
4.5. В свободные USB-порты нужно вставить флешку с программой
«DAVID SCANER» и подключить веб-камеру Logitech, а в папке «DAVID3»
найти ярлык с названием «DAVID3_x64» и запустить его:
Для начала необходимо настроить веб-камеру (рис. 4). В разделе «Setup Type» должно быть выбрано «Hand-Held Laser Setup», а в «Camera» – «Logitech Webcam Pro 9000.» Разрешение камеры и частоту кадров в секунду (FPS) необходимо будет менять в дальнейшем, в зависимости от задания преподавателя.
10