

Sb97583
.pdfМИНОБРНАУКИ РОССИИ
_____________________________________________________
Санкт-Петербургский государственный электротехнический университет « ЛЭТИ» им. В. И. Ульянова (Ленина)
_________________________________________
В. Е. Кузнецов
ПРОЕКТИРОВАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ
Учебно-методическое пособие
Санкт-Петербург Издательство СПбГЭТУ « ЛЭТИ»
2018
1
УДК 621.3.07: 621.316.79: 681.5 ББК 31.264-04 К89
Кузнецов В. Е.
К89 Проектирование следящей системы: учеб.-метод. пособие. СПб.: Изд-во СПбГЭТУ « ЛЭТИ», 2018. 32 с.
ISBN 978-5-7629-2389-7
Содержит основные сведения по выбору и рекомендации к статическому расчету элементов и устройств следящей системы. Приведены схемы практической реализации элементов и устройств. Предназначено для студентов, обучающихся по направлению 27.03.04 « Управление в технических системах».
УДК 621.3.07: 621.316.79: 681.5 ББК 31.264-04
Рецензент – д-р техн. наук А. С. Ривкин (АО « Автоматика-Север»).
Утверждено редакционно-издательским советом университета
в качестве учебно-методического пособия
ISDN 978-5-7629-2389-7 |
© СПбГЭТУ « ЛЭТИ», 2018 |
2
ПРЕДИСЛОВИЕ
Учебно-методическое пособие содержит рекомендации по проектированию следящей системы и требования по оформлению обязательных разделов пояснительной записки.
Обязательными разделами являются:
1.Титульный лист, задание и оглавление.
2.Введение, включающее постановку задачи, общие сведения о проектируемой системе, ее назначении и особенностях.
3.Статический расчет, включающий:
а) составление функциональной схемы системы; б) выбор исполнительного двигателя (прил. 1, 2) и расчет редуктора; в) выбор чувствительного элемента [1];
г) выбор и расчет демодулятора (фазочувствительного выпрямителя); д) расчет полупроводниковых усилителей мощности для управления
двигателем; е) определение параметров передаточных функций элементарных
звеньев следящей системы, построение ЛАХ и ЛФХ разомкнутой нескорректированной системы.
4.Графическая часть курсового проекта, включающая полную принципиальную электрическую схему системы и всех составных частей следящей системы, входящих расчет. Содержит спецификацию всех элементов принципиальной электрической схемы.
5.Заключение.
6.Библиографический список использованной литературы. Пояснительная записка курсового проекта составляется в соответствии
стребованиями ЕСКД.
1.ЗАДАНИЕ К КУРСОВОМУ ПРОЕКТУ
Требуется спроектировать следящую систему в соответствии со следующими техническими условиями работы:
1. Параметры механической нагрузки на выходной оси следящей системы:
–момент инерции Jн ;
–статический момент Mн .
2. Род тока электрического исполнительного двигателя:
– постоянный;
3
– переменный.
3.Характер изменения управляющего воздействия на входной оси следящей системы:
– гармонический (синусоидальный);
– ступенчатый.
4.При работе следящей системы в режиме отработки синусоидального задания (например, при компенсации качки) вида
θi (t ) = θi max sin ωi t , |
(1.1) |
необходимо обеспечить точность слежения с динамической ошибкой, не превышающей θд , где θi max – амплитуда задающего воздействия; ωi –
круговая частота задающего воздействия.
5. При работе следящей системы в режиме отработки ступенчатого воздействия δ1(t ):
0, t < 0; |
|
|
|
|
= 0; |
, |
(1.2) |
θi (t ) = δ1(t ) = gi , t |
|||
|
> 0 |
|
|
0, t |
|
|
|
где gi – уровень задающего воздействия, |
необходимо |
обеспечить |
|
максимальную скорость отработки ω нmax |
и |
максимальное |
ускорение |
отработки ε нmax . |
|
|
|
Числовые значения указанных величин выдаются в индивидуальных заданиях.
2. ФУНКЦИОНАЛЬНАЯ СХЕМА СЛЕДЯЩЕЙ СИСТЕМЫ
Существует множество следящих систем, отличающихся по принципу действия, структуре, набору элементов, принципу управления исполнительным двигателем, роду источников питания и т. д.
Всоответствии с заданием к курсовому проекту составляется функциональная схема системы. В зависимости от типа исполнительных устройств в маломощных системах применяются, главным образом, полупроводниковые усилители переменного и постоянного тока. В ряде систем (например, общепромышленного использования) могут применяться тиристорные преобразователи.
Вкачестве чувствительных элементов в следящих системах могут применяться индуктивные, индукционные, потенциометрические, фотоэлектрические, емкостные и другие датчики. В курсовом проекте
4
предполагается использование синусно-косинусных вращающихся трансформаторов [1].
При проектировании системы необходимо стремиться к ограничению количества используемых источников питания, типов элементов и номиналов выбранных элементов, что в свою очередь влияет на рациональность построения электрической схемы. Выбор значения напряжения источников питания и номиналов элементов следует проводить в соответствии с используемыми на практике шкалами стандартных напряжений и типовыми рядами номиналов элементов согласно ГОСТ 18275-72.
Номинальные значения постоянного напряжения в вольтах следует выбирать из ряда:
1,2; 1,5; 2,4; 3,0; 4,0; 4,5; 5,0; 5,2; 6,0; (6,3); 9,0; (10,0); 12,0; (12,6); 15,0; 20,0; 24,0; 27,0; 30,0; 36,0; (40,0); 48,0; 60,0; 80,0; 100; 150; 200; 250; (300); 400;
значения действующего переменного напряжения – из ряда:
6,0; (6,3); 12,0; (12,6); 15,0; 24,0; 27,0; 36,0; 40,0; 60,0; 80,0; (110); 115; 127; 200; 220; 380.
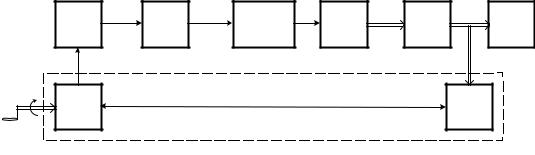
Требования к структуре следящей системы. Функциональная схема проектируемой следящей системы, изображенная на рис. 2.1, должна включать в себя следующие обязательные элементы построения, выбора и расчета: Дв – двигатель [2]; Р – редуктор; ОУ – объект управления (нагрузка Н); УМ – усилитель мощности [3]–[8]; У – предварительный усилитель [3], [4]; Пр – преобразователь (модулятор или демодулятор) [1], [6]; ЧЭ – чувствительный элемент [1], [5].
Для механического задания углового положения входной оси θi
используется пара одинаковых устройств, электрически связанных друг с другом. Д – датчик – задает угол отработки; П – приемник, механически связанный с выходной осью следящей системы, – измеряет угловое положение ОУ (нагрузки).
Рис. 2.1
5
В курсовом проекте предлагается применить синусно-косинусные вращающиеся трансформаторы (ВТ), соединенные по схеме трансформаторной синхронной связи.
Для питания силовых цепей, включающих исполнительные двигатели, и схем системы управления, следящая система использует независимые источники напряжения. Для питания датчиков переменного тока обычно используется отдельная сеть переменного тока (высокочастотная).
Для питания отдельных элементов электрической схемы управления используются вторичные источники напряжения, часть из которых стабилизируется.
3. ВЫБОР ИСПОЛНИТЕЛЬНОГО ДВИГАТЕЛЯ И РЕДУКТОРА СЛЕДЯЩЕЙ СИСТЕМЫ
В системах автоматического управления внешние нагрузочные моменты представляет собой, как правило, случайные функции времени. Например, в радиолокационной следящей системе момент сопротивления движению антенны определяется скоростью ветра и его направлением и зависит от скорости движения антенны, если она установлена на подвижном объекте.
При выборе мощности исполнительного двигателя необходимо оптимально подобрать его параметры. Если выбранный исполнительный двигатель окажется с завышением мощности, то это приведет к увеличению габаритов и массы привода, а следовательно, к увеличению момента инерции ротора двигателя и редуктора, что отрицательно скажется на динамических свойствах системы.
Если выбрать двигатель с заниженной мощностью, то это приведет к недопустимым рассогласованиям в следящей системе при максимальных скоростных нагрузках.
Замена реального закона изменения управляющего сигнала гармоническим (1.1) упрощает определение эквивалентного момента нагрузки, действующего на исполнительный двигатель. Эквивалентный момент учитывает динамику работы следящей системы и требует знания ряда его характеристик. Предварительно электродвигатель выбирается весьма ориентировочно, а затем проверяется по эквивалентному моменту на нагрев. При выборе мощности и типа электрической машины может потребоваться последовательность проверок, прежде чем окончательно будет выбран исполнительный двигатель для проектируемой системы.
6
Нагрузка на выходной оси следящей системы определяется моментом статического сопротивления Mн и моментом инерции Jн объекта управления, а также характером изменения управляющего сигнала, который характеризуется его амплитудой θi max и частотой ωi . Полагая, что
точность воспроизведения следящей системой управляющего воздействия (1.1), (1.2) достаточно высока, можно считать, что наибольшая скорость вращения выходной оси системы
ωн max = θi max ωi ,
а наибольшее ускорение
εн max = θi max ω2i .
Ориентировочный выбор мощности электродвигателя проводится по моменту сопротивления MН и угловой скорости вала нагрузки ωоmax в
статическом (без ускорений) режиме работы [8]:
P = (1,2...2,5) Mн ωн max ,
где (1,2…2,5) – коэффициент запаса мощности, необходимой для создания требуемых ускорений ( P , [Вт]; Mн , [Нм]; ωнmax , [рад/с]).
По определенной мощности P из таблиц выбирается двигатель с близким значением мощности с учетом требований задания в отношении рода тока. Выбранный исполнительный двигатель с номинальной скоростью вращения n д и моментом инерции ротора J д затем проверяется
на пригодность для работы в проектируемой следящей системе.
По номинальной скорости вращения двигателя n д и максимальной
угловой скорости вала нагрузки |
ωн max определяется передаточное |
|||
отношение редуктора |
|
|
|
|
i |
р |
= |
n д |
. |
|
||||
|
|
ωн max |
||
|
|
|
||
В следящих системах обычно используются редукторы с цилиндрическими и коническими колесами, которые обладают высоким коэффициентом полезного действия η р= 0,9...0,95 .
Фактически момент инерции редуктора, приведенный к валу исполнительного двигателя, зависит лишь от первых четырех шестерен [8].
Поэтому влиянием остальных пар зубчатых колес, определяющих полное передаточное число редуктора i р , пренебрегают.
7
Расчетный момент инерции редуктора Jр (по первым двум парам
колес), приведенный к валу исполнительного двигателя (ИД), можно определить по формуле
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
1 |
|
b |
D |
|
|
4 |
|
i |
2 |
|
b |
D |
4 |
|
|
|
|
|||||
|
|
|
|
|
|
|
= J |
|
|
+ i |
2 |
+ |
|
|
|
|
|
+ |
|
|
|
, |
|
|
|
||||||||||||||
|
|
|
|
|
J |
|
1 |
|
|
|
|
|
3 |
|
|
3 |
|
|
14 |
|
4 |
|
3 |
|
|
|
|
(3.1) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
b |
D |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
р |
|
0 |
b |
|
12 |
|
|
i |
2 |
|
D |
|
|
|
i |
4 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
2 |
|
4 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
= π γ D4b |
, |
|
|
|
|
|
|
|
|
|
|
|
(3.2) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
32 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
J0 |
– момент инерции первой шестерни ( D1 ) на валу двигателя, |
||||||||||||||||||||||||||||||||||||||
выполненной из материала с плотностью γ |
(для стали γ |
|
= 7,8 г см3 ). При |
||||||||||||||||||||||||||||||||||||
этом |
кинематическая |
схема |
|
части |
|
редуктора |
|
представляется |
|
в |
виде |
||||||||||||||||||||||||||||
i |
= |
D2 |
, i |
34 |
= |
D4 |
, i |
|
|
= i |
|
i |
34 |
, где D , D , D , D |
|
– диаметр, а b , b , b , b – |
|||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
12 |
|
D1 |
|
D3 |
14 |
12 |
|
|
|
|
|
|
1 |
|
2 |
|
|
3 |
4 |
|
|
|
|
|
|
1 |
2 |
3 |
4 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ширина зубчатых колес. Для простоты колеса считают сплошными цилиндрами, а моментами инерции промежуточных валов пренебрегают.
В качестве примера оптимизации передаточного числа редуктора в табл. 3.1 представлены значения передаточных чисел i14, i12, i34 , а также значения отношения Jр J0 , соответствующие минимуму функции (3.1) при
J0 , соответствующие минимуму функции (3.1) при
условии D3 = 1 и b1 = b2 = b3 = b4 .
D1
Таблица 3.1
Оптимизированные передаточные числа редуктора
i14 |
8 |
12 |
14 |
16 |
20 |
24 |
28 |
i12 |
2,26 |
2,58 |
2,71 |
2,84 |
3,05 |
3,24 |
3,42 |
i34 |
3,54 |
4,65 |
5,16 |
5,63 |
6,55 |
7,4 |
8,2 |
Jр J0 |
8,75 |
11,1 |
12,1 |
12,1 |
15,0 |
16,7 |
18,4 |
Внимание! Обязательные требования к редуктору в курсовом проекте. При расчете редуктора следует выбирать диаметры шестерен таким образом, чтобы диаметр наибольшей из них не превосходил диаметра фланца электродвигателя.
Габаритные и установочные размеры используемых двигателей приведены в прил. 3.
8

Проверка выбранного двигателя на нагрев проводится с помощью расчета эквивалентного момента.
По данным двигателя ( Jд ), редуктора ( iр , ηр и Jр ), нагрузки ( Mн и Jн )
и заданному ускорению вала нагрузки εн max вычисляется эквивалентный момент на валу двигателя
|
|
|
|
M |
2 |
|
|
|
|
M |
|
= |
|
|
н |
|
+ J |
|
+ J + |
|
|
η |
|
||||||
|
э |
|
i |
|
|
д |
р |
||
|
|
|
|
р р |
|
|
|
||
|
J |
2 |
εн2 max |
iр2 |
|
||
|
|
н |
|
|
|
. |
(3.3) |
|
|
η |
|
|
|||
i |
2 |
|
2 |
|
|
|
|
|
р |
р |
|
|
|
|
|
Числовое значение номинального момента выбранного двигателя Mвр
должно превышать (в допустимых пределах) полученное значение эквивалентного момента Mэ (3.3) для обеспечения работоспособности следящей системы при эксплуатации. Условием работоспособности выбранного двигателя принимается соотношение
Mвр |
= 1,05...1,25 . |
(3.4) |
|
||
Mэ |
|
|
В случае, если при первоначально выбранном двигателе условие (3.4) не обеспечивается, то выбирается другой двигатель большей мощности и производится аналогичная проверка его пригодности для работы в проектируемой системе.
Передаточная функция электромеханической системы с жесткой связью двигателя постоянного тока независимого возбуждения с нагрузкой, как отношение угла поворота вала θo(p) к напряжению питания двигателя
U(p) , имеет следующий вид:
W (p) = |
θo(p) |
= |
kд |
|
|
|
, |
||
U(p) |
p (1+ Tдp + TдTэp2 ) |
|||
где Tд– электромеханическая постоянная двигателя; Tэ– электромагнитная постоянная двигателя; kд – коэффициент передачи двигателя.
Без учета электромагнитных процессов двигателя (величина электромагнитной постоянной времени Tэ в несколько раз меньше электромеханической постоянной Tд) используется упрощенная
передаточная функция вида
W (p) = ( kд ) , p 1+ Tдp
9

где kд определяется выражением
kд = 1 . CE
Конструктивная постоянная по ЭДС двигателя CE , равная постоянной
CM по электромагнитному моменту (CE = CM , [Нм/A]), определяется через номинальные значения переменных электродвигателя по формуле:
CE = (U я − IяRя)30 ,
π nд
где U я – номинальное напряжение; Iя – номинальный ток якоря; Rя –
сопротивление обмотки якоря; nд – номинальная скорость вращения.
Электромеханическая постоянная времени системы, при приведении нагрузки к валу двигателя, определяется следующим образом:
|
|
|
+ J + |
J |
|
|
|
|
|
J |
д |
|
н |
R |
я |
||
|
2 |
|||||||
|
|
р |
i |
|
||||
T = |
|
|
|
|
|
. |
||
|
|
|
|
|
|
|||
д |
|
CE CM |
|
|
|
|||
|
|
|
|
|
|
|||
4. ВЫБОР ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА –
ДАТЧИКА ОБРАТНОЙ СВЯЗИ
С помощью чувствительного элемента в следящей системе осуществляется сравнение выходного угла объекта управления θо с входным углом задания θi , в результате чего формируется ЭДС ошибки рассогласования θ замкнутой системы [1], [5].
Рассматриваемый в работе чувствительный элемент в этом случае представляет собой блок, состоящий из двух вращающихся трансформаторов (ВТ), включенных по схеме синхронной связи. На одной из машин механически задается угловое положение (датчик), а на другой (приемник) формируется ЭДС ошибки рассогласования.
Использование вращающихся трансформаторов как датчиков угла рассогласования вследствие их высокой точности позволяет создавать одноотсчетные следящие системы.
На рис. 4.1 приведена схема трансформаторной синхронной передачи с механическим заданием угла следящей системы и использованием вращающегося трансформатора как датчика угла поворота выходной оси следящей системы.
10