

LS-Sb88903
.pdfМИНОБРНАУКИ РОССИИ
–––––––––––––––––––––––––––––––––
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»
–––––––––––––––––––––––––––––––––––––––
МОДЕЛИРОВАНИЕ
СИСТЕМ УПРАВЛЕНИЯ
Электронные методические указания
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2012
УДК 681.51я7
Моделирование систем управления: Электронные методические указания к лабораторному практикуму по курсу «Моделирование систем управления» / Сост.: Ю. В. Постников, Д. Н. Туркин. СПб.: Изд-во СПбГЭТУ
«ЛЭТИ», 2012. 28 с.
Рассмотрены вопросы подготовки и решения широкого круга инженерных задач по разработке систем управления электромеханическими объектами с использованием специального программного обеспечения.
Методические указания предназначены для подготовки инженеров по специальности 180400 – « Электропривод и автоматика промышленных установок и технологических комплексов».
Утверждено редакционно-издательским советом университета
вкачестве электронных методических указаний
©СПбГЭТУ «ЛЭТИ», 2012
|
Cодержание |
|
Работа №1 |
Расчет цифрового регулятора для непрерывного объекта |
|
управления методом ЛАФЧХ ................................................................................ |
4 |
|
Работа №2 |
Параметрическая оптимизация системы управления...................... |
9 |
Работа №3 |
Разработка системы по принципам модального управления........ |
17 |
Варианты заданий ................................................................................................. |
23 |
|
Литература ............................................................................................................. |
27 |
|
3
Работа №1 Расчет цифрового регулятора для непрерывного объекта
управления методом ЛАФЧХ
Цель работы: получение практических навыков расчета цифровых регуляторов для непрерывных объектов методом ЛАФЧХ.
Содержание
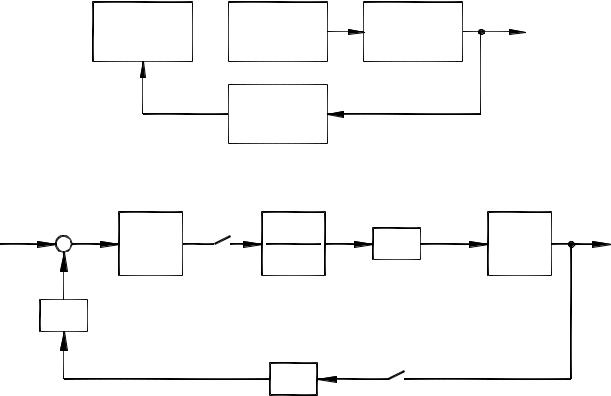
Рассматривается система управления непрерывным объектом с ЭВМ в контуре регулирования. Функциональная схема такой системы приведена на рис. 1,а, а соответствующая структурная – на рис. 1,б. На схемах обозначено:
ЦАП – цифроаналоговый |
преобразователь; |
ЦДОС |
– цифровой датчик |
|||
обратной связи; Wr (z) |
– передаточная функция |
дискретного регулятора, |
||||
который требуется реализовать средствами |
ЭВМ; Wo (z) – передаточная |
|||||
функция объекта управления; kД =216=65535 – |
коэффициент передачи ЦДОС; |
|||||
k |
ЦАП |
=1/216=1,526·10-5 – |
коэффициент ЦАП; |
T |
– |
период дискретизации |
|
|
|
0 |
|
|
|
системы. При составлении структурной схемы сделано предположение, что эффектами квантования по амплитуде можно пренебречь.
ЭВМ  ЦАП
ЦАП
ЦДОС
|
|
|
а) |
uв(z) |
ur (z) |
1-e |
-T0 p |
|
|||
|
Wr (z) |
|
|
|
p |
||
|
T0 |
||
−1
uд(p )
kд
Объект
управления
uу(p ) |
y(p ) |
kЦАП |
Wo(p ) |
T0
б) Рис. 1
4
uв(p ) |
u r (p ) |
1-e |
-T0 p |
uу(p ) |
y (p ) |
|
Wr (p ) |
|
kЦАП |
Wo(p ) |
|
|
T0 p |
||||
|
|
|
|
||
−1
uд(p )
kд
Рис. 2
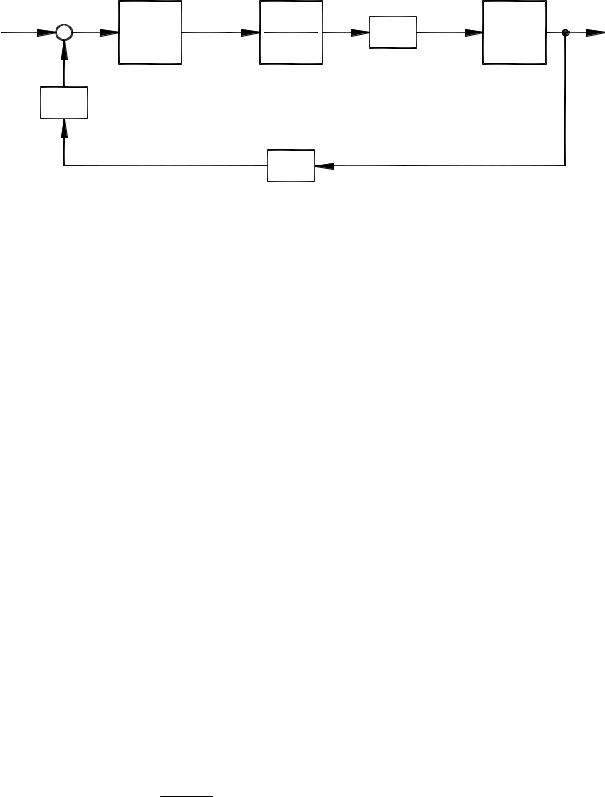
Одна из трудностей проектирования таких систем состоит в том, что объект и цифровой регулятор описаны с помощью разных комплексных переменных. Известно два подхода к решению этой проблемы. Первый состоит в том, что непрерывный объект дискретизируется и вся система рассматривается в области комплексной переменной. При втором подходе определение передаточной функции регулятора выполняется без учета дискретного принципа работы ЭВМ, т.е. вся система, как показано на рис.2, рассматривается в непрерывной форме. При этом учитываются характеристики ЦАП и звеньев запаздывания, если таковые существуют. После этого осуществляется дискретизация передаточной функции регулятора одним из известных методов и составление соответствующих разностных уравнений, которые следует реализовывать в ЭВМ.
В работе рассматривается второй подход к проектированию цифровых регуляторов. Для одного из приведенных в приложении вариантов заданий на разработку одноконтурной системы управления требуется определить структуру и параметры передаточной функции непрерывного регулятора, реализация которой позволит обеспечить системе заданное качество управления.
Рекомендации по выполнению
Для определения структуры и параметров передаточной функции регулятора на основе метода ЛАФЧХ необходимо построить ЛАФЧХ неизменяемой части системы управления, соответствующей передаточной функции:
Wн ( p) = Wо ( p) × kцап × kд × 1 - e-T0 p
T0 p
или, если рассматривать конкретное задание, например вариант 1,
|
k × k |
öàï |
× kä |
|
-τ × p × |
1 - e |
-T0 p |
|
W ( p) = |
|
|
|
e |
|
|
(1) |
|
|
|
|
|
|
||||
í |
p(T1 p +1)(T2 p +1) |
|
|
T0 p |
||||
|
|
|
||||||
где τ - постоянная, характеризующая запаздывание в съеме информации. Построение ЛАФЧХ, соответствующих (1), следует начать с построения
5
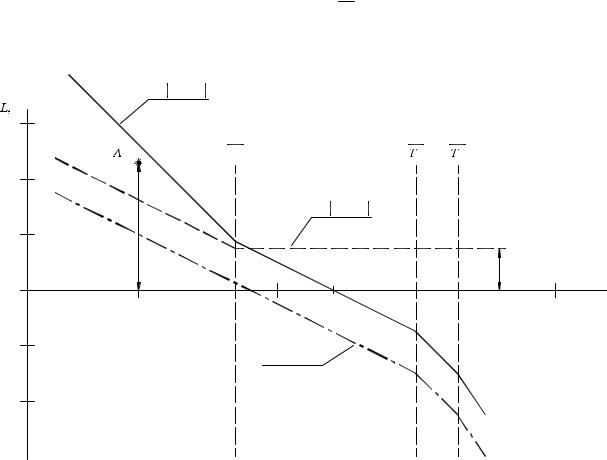
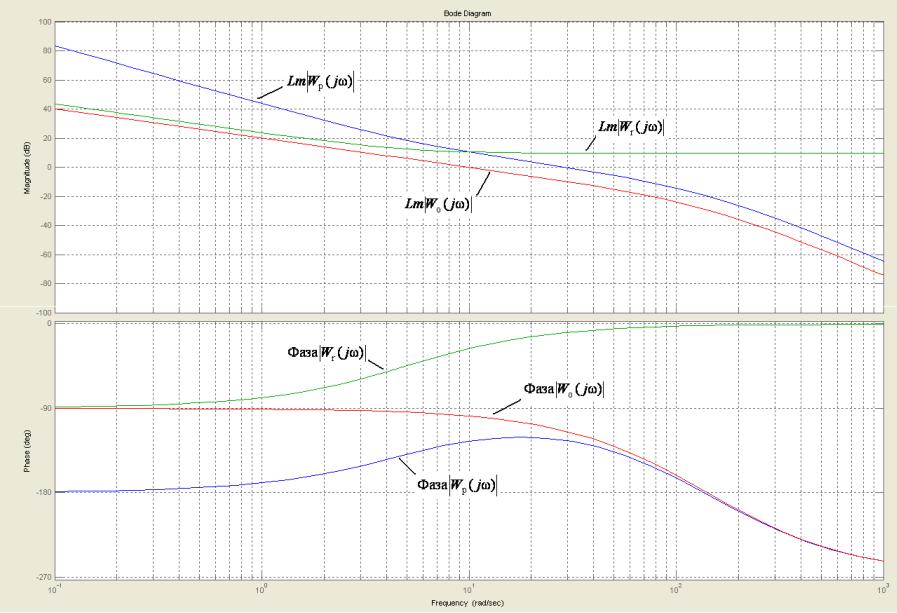
асимптотической ЛАЧХ (без учета звена чистого запаздывания), которая позволит определить структуру и параметры регулятора. На рис. 3 приведены асимптотические ЛАЧХ объекта Wî ( p) , регулятора Wr ( p) и разомкнутой системы Wð ( p) , а на рис. 4 – ЛАФЧХ, построенные с
использованием специальных программных средств, входящих в состав пакета MatLAB. ЛАФЧХ передаточной функции неизменяемой части
проектируемой системы WН ( p) , соответствует |
формуле (1) |
при |
k × kЦАП × kД =10; T1 =0,01 с; T2 =0,005 с; T0 =0.01 с; τ=0,02 с. |
|
|
На основании ЛАФЧХ WН ( p) и технических требований, предъявляемых к системе, следует определить структуру и параметры передаточной функции регулятора Wr ( p) .
Если требования заданы по варианту "а", т.е. необходимо обеспечить, чтобы система переходила из одного устойчивого состояния в другое за указанное время tП и при этом перерегулирование не превышало заданного значения σ, рекомендуется действовать в следующем порядке:
1. Определить частоту среза через заданное время переходного процесса
|
|
ωС |
» π , |
|
|
|
|
|
|
tП |
|
|
|
|
LmWP ( jω) |
|
|
|
|
|
Дб |
|
|
|
|
|
|
60 |
|
1 |
|
1 |
1 |
|
|
- 40 |
|
|
|||
|
к |
τ r |
|
рп |
рп |
|
40 |
|
|
|
|
|
|
|
|
LmWr ( jω) |
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
ωc =25c- 1 |
|
|
20lg(kr) |
0 |
ωэ=1 |
|
|
|
ω, c- 1 |
|
10 |
|
100 |
200 |
1000 |
||
|
|
|||||
|
|
|
|
- 20 |
|
|
- 20 |
|
LmWO ( jω) |
|
- 40 |
|
|
|
|
|
|
|
|
|
- 40 |
|
|
|
|
- 60 |
|
|
|
|
|
|
|
|
|
|
Рис. 3 |
|
|
|
|
|
|
|
|
|
|
6 |
5
Рис. 4
7
2. Сформировать желаемую ЛАХ разомкнутого контура регулирования таким образом, чтобы обеспечить:
-требуемую частоту среза ωС ;
-наклон характеристики в области ωС -20 дБ на декаду, а
протяженность данного участка - не менее одной октавы слева и справа от
ωС ;
-совпадение ЛАХ разомкнутого контура с ЛАХ неизменяемой передаточной функции в области высоких частот;
-наклон -40 дБ на декаду в области низких частот.
3. Из сформированной по п. 2 ЛАХ вычесть ЛАХ неизменяемой части системы и получить ЛАХ регулятора, по которой определить его структуру и параметры.
Для рассматриваемого примера ωС =25 с-1, а ЛАХ разомкнутого контура приведена на рис. 3. Там же показана и ЛАХ регулятора, откуда его передаточная функция
Wr |
( p) = kr |
τ r |
p +1 |
, где kr |
= 3 , а τ r |
= 0.2 с. |
|
τ r p |
|||||||
|
|
|
|
|
|||
В случае варианта “ а”, кроме рассмотренных ранее требований, добавляются дополнительные. Необходимо, чтобы при отработке системой эквивалентного синусоидального воздействия
U в (t) = Aэ sin ωэt |
(2) |
ошибка δ = U В -U Д не превышала заданного значения.
Требование по точности будет выполняться, если обеспечить на частоте ωý прохождение ЛАХ разомкнутой системы выше контрольной точки Ак, которая соответствует коэффициенту усиления в 20 × lg( Aэ / δ) . Для рассматриваемого примера 20 × lg( Aэ / δ) = 46 дБ, и сформированная ЛАХ разомкнутого контура на частоте ωэ проходит над ней.
Требования к отчету
В отчете необходимо описать постановку задачи в соответствии с заданным вариантом и этапы ее решения. К отчету прилагаются: структурная схема системы; необходимые для расчета регулятора ЛАФЧХ; ЛАФЧХ, построенные с использованием специальных программных средств.
|
Контрольные вопросы |
1. |
Какие допущения делаются при расчете цифрового регулятора в |
непрерывной форме? |
|
2. |
Из каких соображений формируется желаемая ЛАХ ? |
|
8 |

Работа №2 Параметрическая оптимизация системы управления
Цель работы: приобретение практических навыков по расчету параметров регуляторов, обеспечивающих системе наперед заданные технические характеристики.
Содержание
Оптимизируется система управления, разработанная при выполнении лабораторной работы 1. Структура системы с использованием стандартных блоков библиотеки Simulink представлена на рис. 1.
Рис. 1
Требуется путем изменения параметров дискретного регулятора обеспечить проектируемой системе такую реакцию на ступенчатое управление, которая совпадает с аналогичной, заданной эталонной моделью. В качестве эталонной модели рассматривается модель, соответствующая стандартной настройке на “ Симметричный оптимум”, имеющей следующую передаточную функцию:
WÝ (s) = |
|
4Tμ s + 1 |
|
, |
|
8T 3 s 3 |
+ 8T 2 s 2 |
+ 4T s + 1 |
|||
|
μ |
μ |
μ |
|
|
где Tμ - параметр, характеризующий быстродействие эталонной модели. Чем меньше Tμ , тем быстрее переходный процесс.
В качестве функционала качества предлагается принять интегральный квадратичный критерий, для которого квадратичная форма формируется как квадрат разности между эталонным движением и движением выходной переменной модели проектируемой системы при отработке обеими моделями ступенчатого управления.
Общее математическое описание, соответствующее сформулированной задаче, приведено в виде структурной схемы Simulink на рис. 2.
9
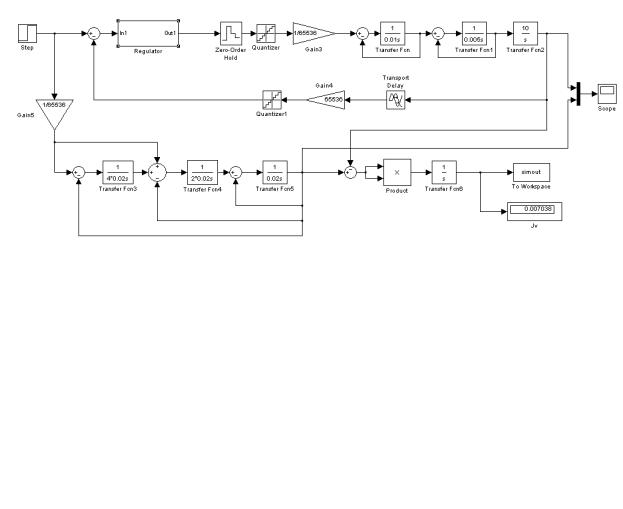
Рис. 2
На рис. 3 представлена подсистема регулятора “Regulator” ( ПИрегулятор).
Рис. 3
Таким образом, задачей работы является определение таких значений параметров регулятора, при которых функционал Jv будет минимальным. Для решения задачи минимизации функции нескольких переменных рекомендуется использовать алгоритм деформированного многогранника, разработанный Нельдером и Мидом. Данный алгоритм реализуется в пакете Matlab при вызове функции fminsearch().
Решение задачи рекомендуется начинать с варианта, для которого
быстродействие эталонной модели характеризуется T ≈ |
tП |
. Параметры |
|
||
μ |
3 |
|
|
|
регулятора считаются подобранными, если в процессе оптимизации переходный процесс проектируемой системы соответствует стандартной настройке.
В случае успешной реализации начального варианта оптимизационной задачи необходимо продолжить расчеты для других вариантов быстродействия эталонной модели до тех пор, пока будет существовать возможность получить желаемый переходный процесс. При переходе от одного варианта эталонного движения выходной переменной к другому, быстродействие эталонной модели следует увеличивать вдвое.
10